RV-2_使用说明书.pdf - 第343页
第 4 章 操作 篇 4- 8. 维护 263 4 分类 详细 ・ 单位 初始值 输入范围 ・ 项目 IP 地址 169.254. 10.1 激光测量阈值 10 0 ~ 255 (整数) 扫描结束后立即搬出 0 0 ~ 999 ( 整数 ) 偏移设定 激光头的角度 偏移 值(补正 值) [mm] 0 0 ~ 999 ( 整数 ) 反向扫描偏移(补正值 ) [mm] 0.000 0.000 ~ 999.0 00 ( 小数点以下 3 位 )…
第 4 章 操作篇
4-8. 维护
262
设定
分类
详细
・
单位
初始值
输入范围
・
项目
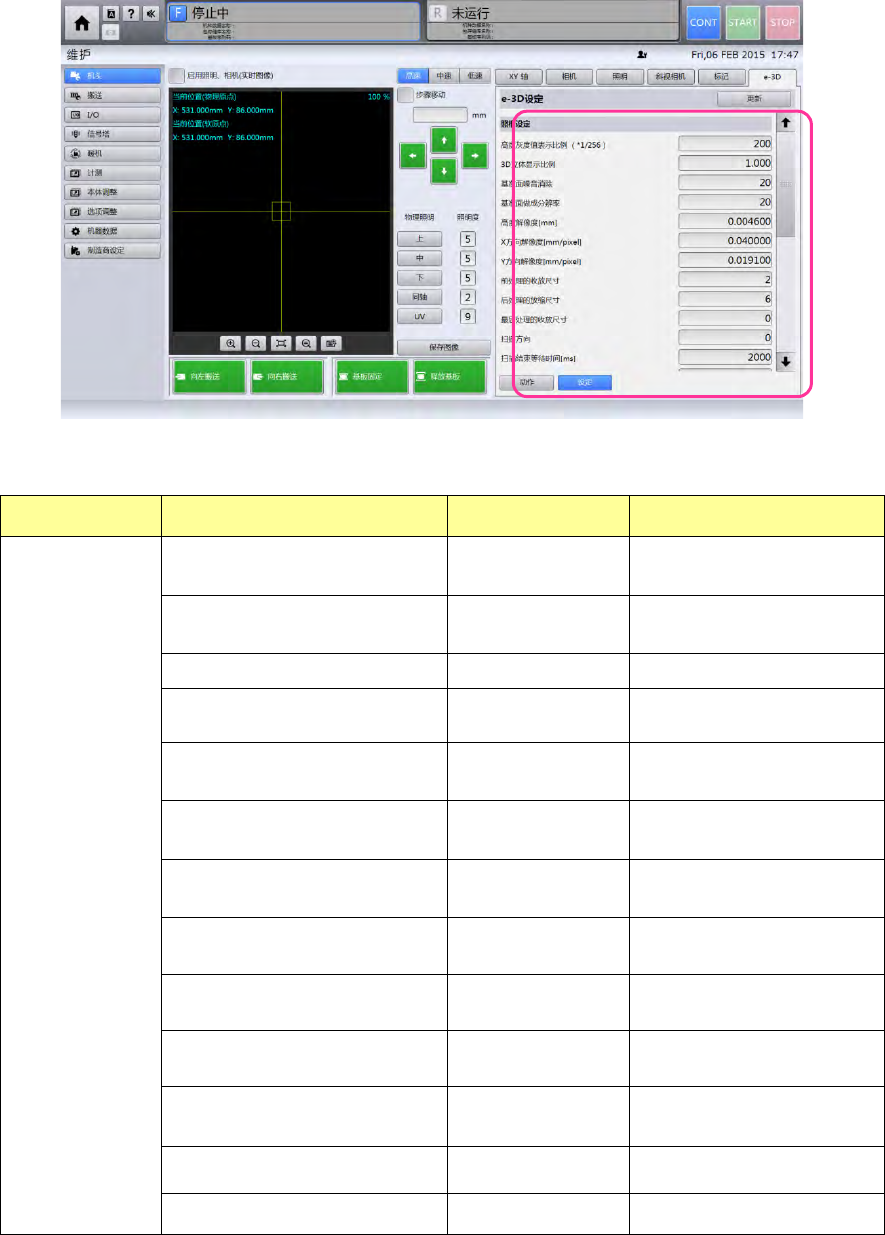
照相设定
高度灰度(亮度)值表示比例
(
*1/256
)
200
0
~
999(
整数
)
3D
立体显示比例
1.000
0.000
~
99.999
(
小数点以下
3
位
)
基准面噪音消除
20
0
~
999(
整数
)
基准面做成分辨率
20
0
~
999(
整数
)
高度解像(析像)度
[mm]
0.004600
0.000000
~
999.000000
(
小数点以下
6
位
)
X
方向解像(析像)度(析
像)
[mm/pixel]
0.040000
0.000000
~
999.000000
(
小数点以下
6
位
)
Y
方向解像(析像)度
[mm/pixel]
0.019100
0.000000
~
999.000000
(
小数点以下
6
位
)
前处理的收放尺寸
2
0
~
999(
整数
)
后处理的收放尺寸
6
0
~
999(
整数
)
最后处理的收放尺寸
0
0
~
999(
整数
)
扫描方向
0
0
~
999(
整数
)
扫描结束等待时间
[ms]
2000
0
~
9999(
整数
)
扫描开始等待时间
[ms]
0
0
~
9999(
整数
)
第 4 章 操作篇
4-8. 维护
263
4
分类
详细
・
单位
初始值
输入范围
・
项目
IP
地址
169.254.10.1
激光测量阈值
10
0
~
255
(整数)
扫描结束后立即搬出
0
0
~
999
(整数)
偏移设定
激光头的角度偏移值(补正
值)
[mm]
0
0
~
999
(整数)
反向扫描偏移(补正值)
[mm]
0.000
0.000
~
999.000
(
小数点以下
3
位
)
前轨的基板停止位置
[mm]
0
0
~
999(
整数
)
后轨的基板停止位置
[mm]
0
0
~
999(
整数
)
X
偏移(补正值)
[mm]
-10.000
0.000
~
999.000
(
小数点以下
3
位
)
Y
偏移(补正值)
[mm]
175.000
0.000
~
999.000
(
小数点以下
3
位
)
速度设定
X
速度
[mm/s]
110
1
~
999(
整数
)
Y
速度
[mm/s]
110
1
~
999(
整数
)
X
加速度
[m/s
2
]
10.000
0.000
~
99.999
(
小数点以下
3
位
)
Y
加速度
[m/s
2
]
15.000
0.000
~
99.999
(
小数点以下
3
位
)
X
减速度
[m/s
2
]
10.000
0.000
~
99.999
(
小数点以下
3
位
)
Y
减速度
[m/s
2
]
15.000
0.000
~
99.999
(
小数点以下
3
位
)
第 4 章 操作篇
4-8. 维护
264
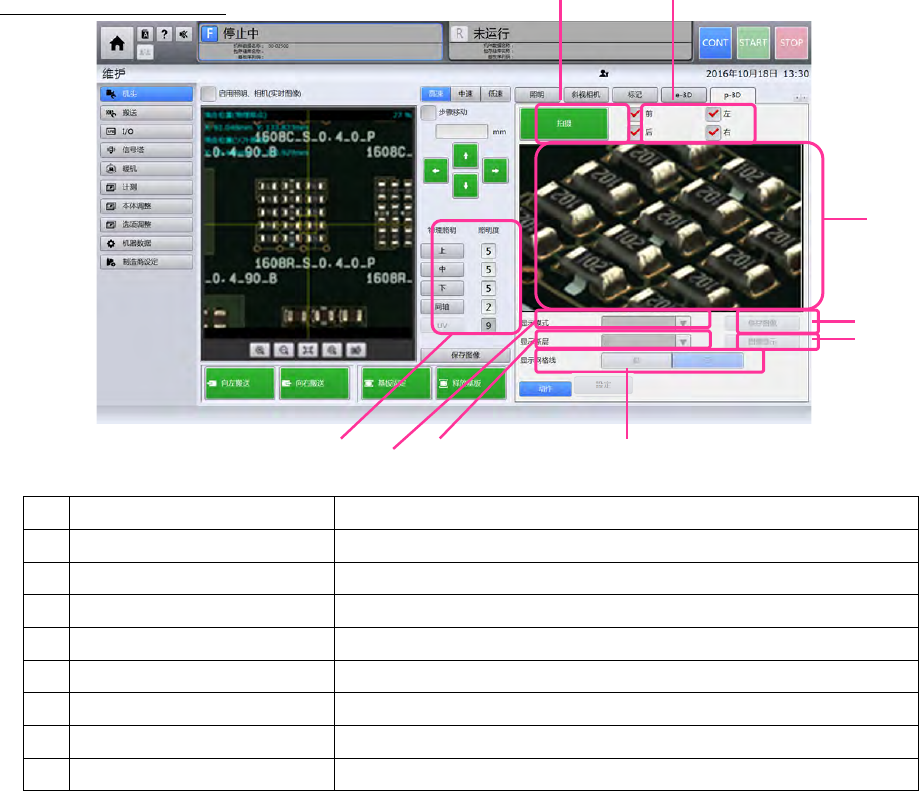
p-3D
(
RV-2-3D
专用)
(a)
捕获
开展收购图像的
p-3D
单元。
(b)
投影机的选择
选择在捕获时的投影机。
(c)
物理照明
在拍摄时选择纹理图像。
(d)
显示模式
设置在
3D
图像显示模式。
(e)
断面显示
到设置在
3D
图像显示器的断面视图。
(f)
网格线显示
要设置
3D
图像的
XYZ
的网格线的显示。
(g)
3D
图像显示区域
要查看
3D
图像
(h)
保存图像
保存高度图像捕获图像。
(i)
显示图像
用于显示在拍摄图像。
a
b
c
d
e
f
h
g
i