00196516-02_UM_X-Serie_SR705_DK.pdf - 第125页
Driftsvejledning SIPLACE X-serie Tekniske data på automaten Fra softwareversion SR.70x.x x Udgave 01/2011 DK Bestykningshoved 125 3.5.1.1 Beskrivelse SIPLACE SpeedS tar (C&P20) arbejd er efter Collect&Plac e prin…
Tekniske data på automaten Driftsvejledning SIPLACE X-serie
Bestykningshoved Fra softwareversion SR.70x.xx Udgave 01/2011 DK
124
3
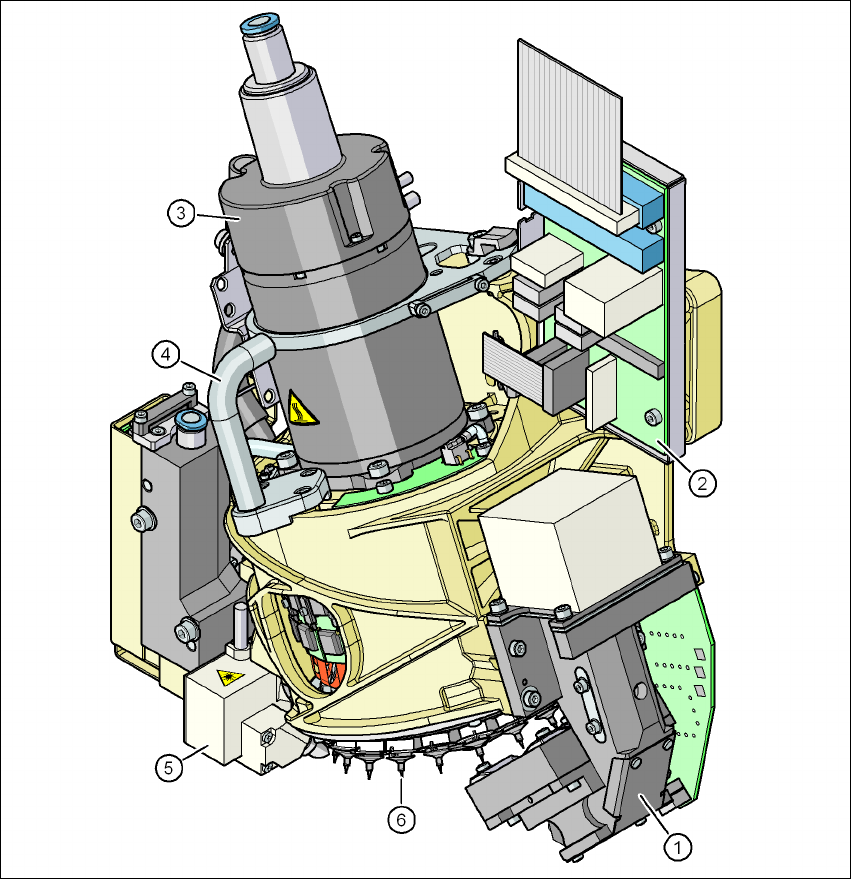
Fig. 3.5 - 2 SIPLACE SpeedStar - funktionsgrupper del 2
(1) Komponent-kamera C&P, type 23, 6 x 6, digital
(2) Mellemfordelerprintkort
(3) Stjernemotor
(4) Greb
(5) Komponentsensor
(6) Stjerne med 20 pipetter
Driftsvejledning SIPLACE X-serie Tekniske data på automaten
Fra softwareversion SR.70x.xx Udgave 01/2011 DK Bestykningshoved
125
3.5.1.1 Beskrivelse
SIPLACE SpeedStar (C&P20) arbejder efter Collect&Place princippet, dvs. at tyve komponenter
hentes af bestykningshovedet inden for en cyklus. Komponentsensoren kontrollerer på bestyk-
nings- /hentepositionen, om en komponent er blevet hentet af pipetten. På vej hen til bestyknings-
positionen centreres komponenterne rent optisk og drejes i den nødvendige bestykningsposition.
Herefter sættes de forsigtigt og positionsnøjagtigt fra på printpladen med blæseluft.
Bestykningshovedet C&P20 har gjort det muligt at forbedre bestykningshovedets kapacitet bety-
deligt og dermed samtidigt bestykningshovedets kapacitet. C&P20 hovedets kompakte konstruk-
tion gør det muligt at gennemføre meget korte cyklustider. I denne forbindelse står stjerneaksen
på skrå i forhold til printpladeniveauet. Denne geometri gør det muligt at place segmenterne me-
get tæt.
Komponent-kameraet er stadigvæk integreret i C&P20-hovedet. Dette spærer ekstra køreveje
til eksterne centreringskameraer. Desuden har hvert segment sit eget DP-drev til rotering af pi-
petten. Pipetterne drejes derfor ikke mere i den rigtige position på en eneste hovedstation. De kan
til enhver tid og uafhængigt af hinanden drejes i deres bestykningsposition.
Hvert segment har sin egen vakuumgenerator. Omkoblingstiderne mellem vakuum og blæseluft
kunne således forkortes betydeligt. Desuden kan en vakuumkontrol gennemføres i holdekredsen
for hver enkelt pipette.
Z-drevet for segmenterne er realiseret med en linearmotor med linear vejmålesystem og dermed
meget præcis. I hente-/bestykningspositionen kører Z-drevet segmenterne lodret op eller ned.
Tekniske data på automaten Driftsvejledning SIPLACE X-serie
Bestykningshoved Fra softwareversion SR.70x.xx Udgave 01/2011 DK
126
3.5.1.2 Tekniske data
3
3
3
3
3.5.1.3 Sensor for komponent-udsmidningsbeholderen
HENVISNING 3
Vi anbefaler at installere den optionale sensor til komponent-fejlvarebeholderen, hvis der anven-
des et SpeedStar. (se også afsnit 6.4, side 403)
Komponent-spektrum
a
a) Vær opmærksom på, at det bestykbare komponent-spektrum også påvirkes af pad-geometrierne, de kunde-
specifikke standarder og komponent-emballagetolerancerne.
01005 til 2220, Melf, SOT, SOD
Komponent-specifikation
maks. højde
min. benafstand
min. benbredde
min. ball-afstand
min. ball-diameter
min. mål
maks. mål
maks. vægt
4 mm
0,25 mm
0,1 mm
0,4 mm
0,2 mm
0,4 x 0,2 mm²
6 x 6 mm²
1 g
Programmerbar påsætningskraft, valgbare trin 1,5 ± 0,5 N
2,0 ± 0,5 N
3,5 ± 1 N
4,5 ± 1 N
Pipettetyper 10 xx, 11 xx, 12 xx
X/Y-nøjagtighed
b
b) Nøjagtighedsværdi målt iht. producentneutral IPC-standard
± 41 μm/3σ, ± 55 μm/4σ
Vinkelnøjagtighed ± 0,5°/3σ, ± 0,7°/4σ
Komponent-kameratype 23
Belysningsniveauer 5
Indstillingsmuligheder for belysningsniveauerne 256
5