00196516-02_UM_X-Serie_SR705_DK.pdf - 第130页
Tekniske data på automaten Driftsvejledning SIPLACE X-serie Bestykningshoved Fra softwareversion SR.70x.xx Udgave 01/2011 DK 130 rede komponent-kamer a. V ed store komponenter ind til 50 x 40 mm² arbejder bestykningshove…
Driftsvejledning SIPLACE X-serie Tekniske data på automaten
Fra softwareversion SR.70x.xx Udgave 01/2011 DK Bestykningshoved
129
3
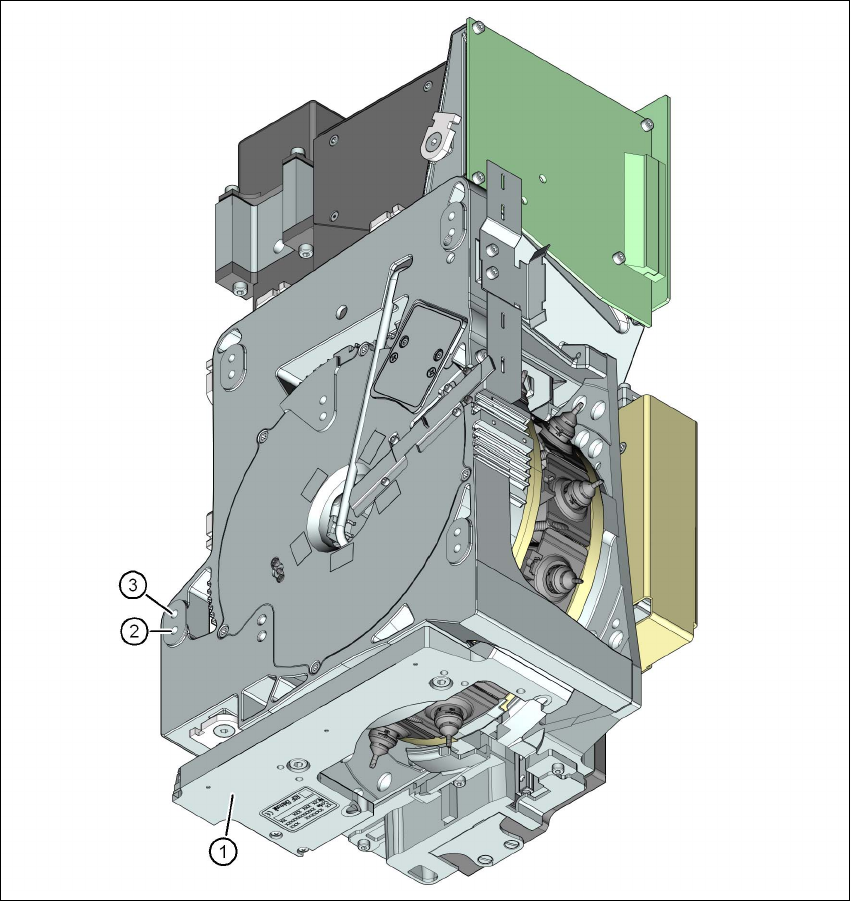
Fig. 3.5 - 5 SIPLACE MultiStar - set bagfra, funktionsgrupper del 3
(1) Komponentsensor
(2) Monteringsposition for en komponenthøjde indtil 11,5 mm
(3) Monteringsposition for en komponenthøjde indtil 6 mm
3.5.2.1 Beskrivelse
MultiStar forener de to modsatte egenskaber som høj bestykningskapacitet og høj fleksibilitet.
Ved små komponentelementer indtil 27 x 27 mm² arbejder MultiStar efter Collect&Place-proces-
sen, dvs. med høj bestykningskapacitet. Hertil centreres komponenterne optisk med det integre-
Tekniske data på automaten Driftsvejledning SIPLACE X-serie
Bestykningshoved Fra softwareversion SR.70x.xx Udgave 01/2011 DK
130
rede komponent-kamera. Ved store komponenter indtil 50 x 40 mm² arbejder bestykningshovedet
efter Pick&Place-princippet; komponenterne centreres optisk med det stationære kamera.
Kombinationen af de to bestykningsprincipper C&P og P&P gav navnet til MultiStar. Det betegnes
kort og godt CPP-hovedet.
De 12 segmenter i CPP-hovedet er anbragt stjerneformet. En torquemotor med højt drejningsmo-
ment drejer stjernen omkring den vandrette akse, stjerneaksen.
Har hvert segment sit eget DP-drev til rotering af pipetten. Pipetterne drejes derfor ikke mere i den
rigtige position på en eneste hovedstation. De kan til enhver tid og uafhængigt af hinanden drejes
i deres bestykningsposition.
Hvert segment har sin egen vakuumgenerator. Omkoblingstiderne mellem vakuum og blæseluft
kan således forkortes betydeligt. Desuden kan en vakuumkontrol gennemføres i holdekredsen for
hver enkelt pipette.
Z-drevet for segmenterne er realiseret med en linearmotor med linear vejmålesystem og dermed
meget præcis. I hente-/bestykningspositionen kører Z-drevet segmenterne lodret op eller ned.
Lige som ved alle SIPLACE Collect&Place-hoveder er det digitale komponent-kamera integreret
på bestykningshovedet. Bortfaldet af ekstra bevægelsesveje til den optiske centrering af kompo-
nenterne bidrager til en høj forarbejdningshastighed.
Komponent-sensoren på undersiden af bestykningshovedet måler komponenterne på hente-/
bestykningspositionen. Hver gang Z-aksen bevæger sig, kan der gennemføres målinger på pipet-
tespidsen, der oplyser om en komponent hæfter på pipetten og hvor høj komponenten er.
3.5.2.2 Monteringspositioner for SIPLACE MultiStar
CPP-hovedet kan monteres i to forskellige positioner på hovedholderen:
– MultiStar i den øverste monteringsposition
I denne position kan alle komponenter forarbejdes indtil en størrelse på 50 x 40 mm² og en
højde på indtil 11,5 mm. 3
– MultiStar i den nederste monteringsposition
I denne position bestykker CPP-hovedet komponenterne indtil en størrelse 27 x 27 mm² og
en komponenthøjde på 6 mm efter Collect&Place-processen. 3
Overhold følgende regler, når monteringspositionen fastlægges:
→ Hovedhøjden skal være ens for alle bestykningshoveder i et bestykningsområde.
→ Installér altid CPP-hovedet i den øverste monteringsposition, hvis det kombineres med føl-
gende komponenter:
– Stationært komponent-kamera
Driftsvejledning SIPLACE X-serie Tekniske data på automaten
Fra softwareversion SR.70x.xx Udgave 01/2011 DK Bestykningshoved
131
– Matrix Tray Changer
– TwinStar
3.5.2.3 Klassificering af komponentspektret, der skal forarbejdes
3
3.5.2.4 Bestykningsfunktioner for MultiStar
Afhængigt af komponentklasse arbejder CPP-hovedet i forskellige bestykningsfunktioner. Klargø-
ringsoptimeringen vælger hertil bestykningsfunktionen med de minimale takttider. I den efterføl-
gende tabel vises sammenhængen mellem komponentklasse og bestykningsfunktion.
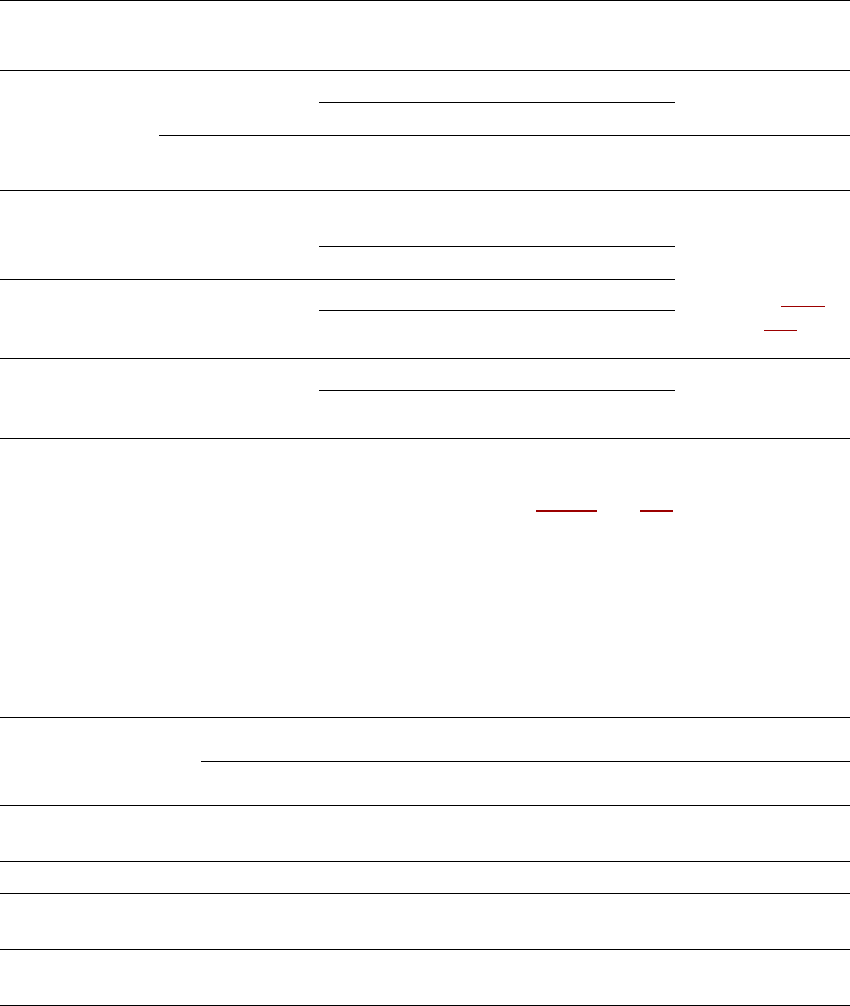
Tab. 3.5 - 2 Relationer mellem komponentklasse og bestykningsfunktioner
3
3
Komponent-
klasse
Komponentstø
rrelse
Monteringspositio
n
a
for CPP-hovedet
Komponent-
højde
Komponent-
kameratype
Lille komponent
K_BE
01005
b
-
27 x 27 mm²
oppe til 8,5 mm
Hovedkamera,
type 30
nede til 6 mm
01005
b
-
16 x 16 mm²
nede til 6 mm
Hovedkamera,
type 38
Middelstor kom-
ponent, type
M_BE_1
< 27 x 27 mm²
oppe
mellem 8,5 og
11,5 mm
Stationært kompo-
nent-kamera,
type 33
(se afsnit 6.7.1
,
side 406
)
nede ikke mulig
Middelstor kom-
ponent, type
M_BE_2
mellem
27 x 27 mm² og
32 x 32 mm²
oppe 11,5 mm
nede ikke mulig
Stor komponent
G_BE
mellem 32
x 32 mm² og
50 x 40 mm²
oppe til 11,5 mm Stationært kompo-
nent-kamera,
type 33
nede ikke mulig
Tab. 3.5 - 1 Klassificering af komponentspektret, der skal forarbejdes
a) Følg venligst reglerne for højden af monteringspositionerne i afsnit 3.5.2.2, side 130.
b) 01005-komponent: Kameratype 30; kameratype 38 anbefalet til høje kvalitetskrav
Bestyknings-
funktion
Komponentklasse
Lille komponent Mellemstor komponent Stor komponent
Collect&Place-
funktion
Ja Nej Nej
Blandet funktion Ja Ja Nej
Udvidet Pick&Place-
funktion
Ja Ja Ja
Ren
Pick&Place-funktion
Nej Nej Ja