YRM20_Ope_E.pdf - 第43页
3. Head unit 1-12 Chapter 1 Unit names and functions Z-axis unit and V -axis unit are located on both left-and-right sides of RM head unit. Z-axis unit pla ys role to descend nozzle shaft by pushing down with a rod upon …
3. Head unit
1-11
Chapter 1 Unit names and functions
3.1 Component pick-and-place head
3.1.1 RM Head unit
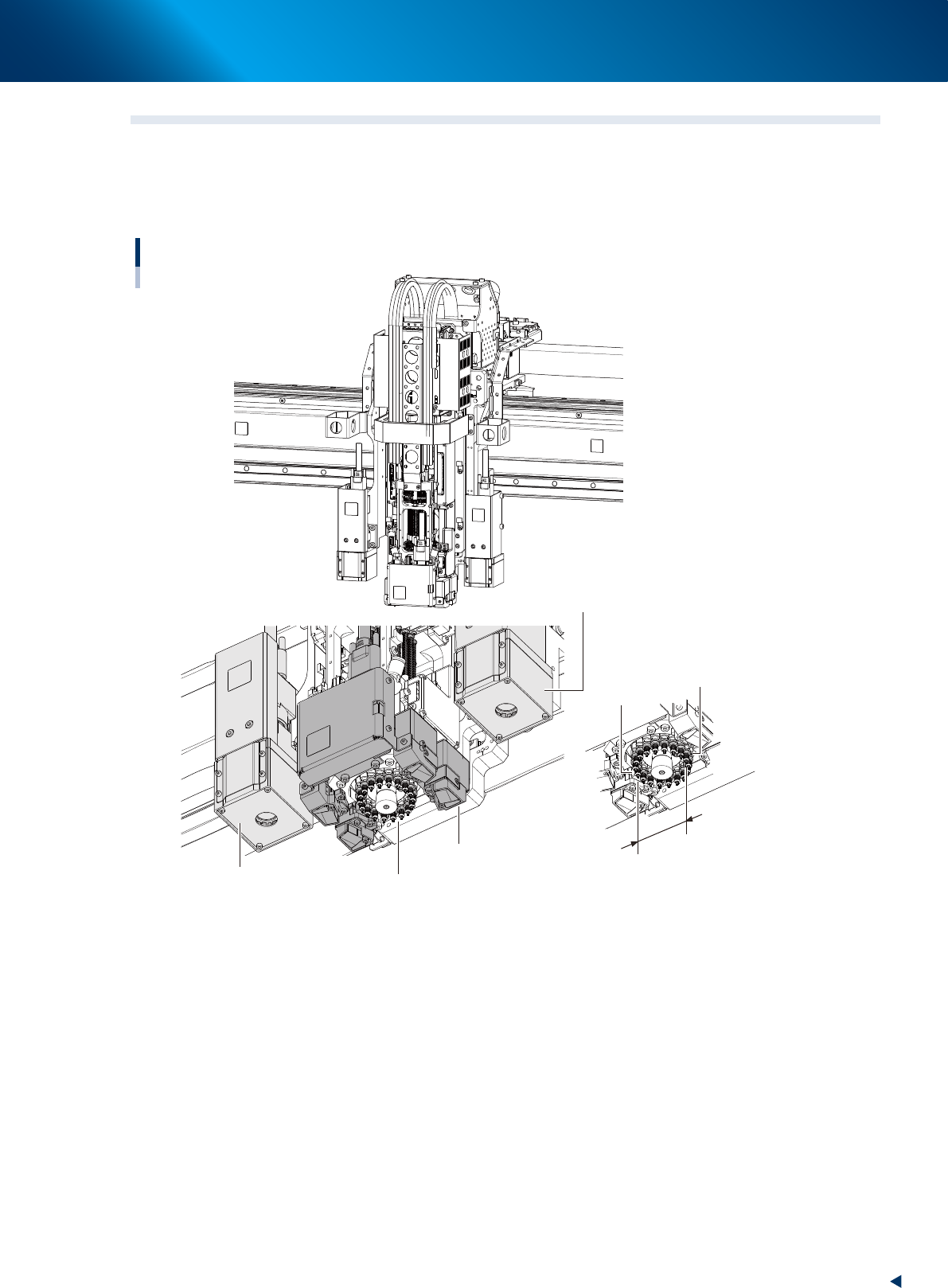
RM head unit employs rotary mechanism and it has 18 pick-and-place heads per one unit.
RM head unit has two fiducial cameras on its left and right sides and has four side view cameras on bottom.
36mm
RM head unit
Fiducial camera 1
Fiducial camera 2
Side-view camera 2
Rotary type head
Head 1
Head 10
23109-KMX-00
3. Head unit
1-12
Chapter 1 Unit names and functions
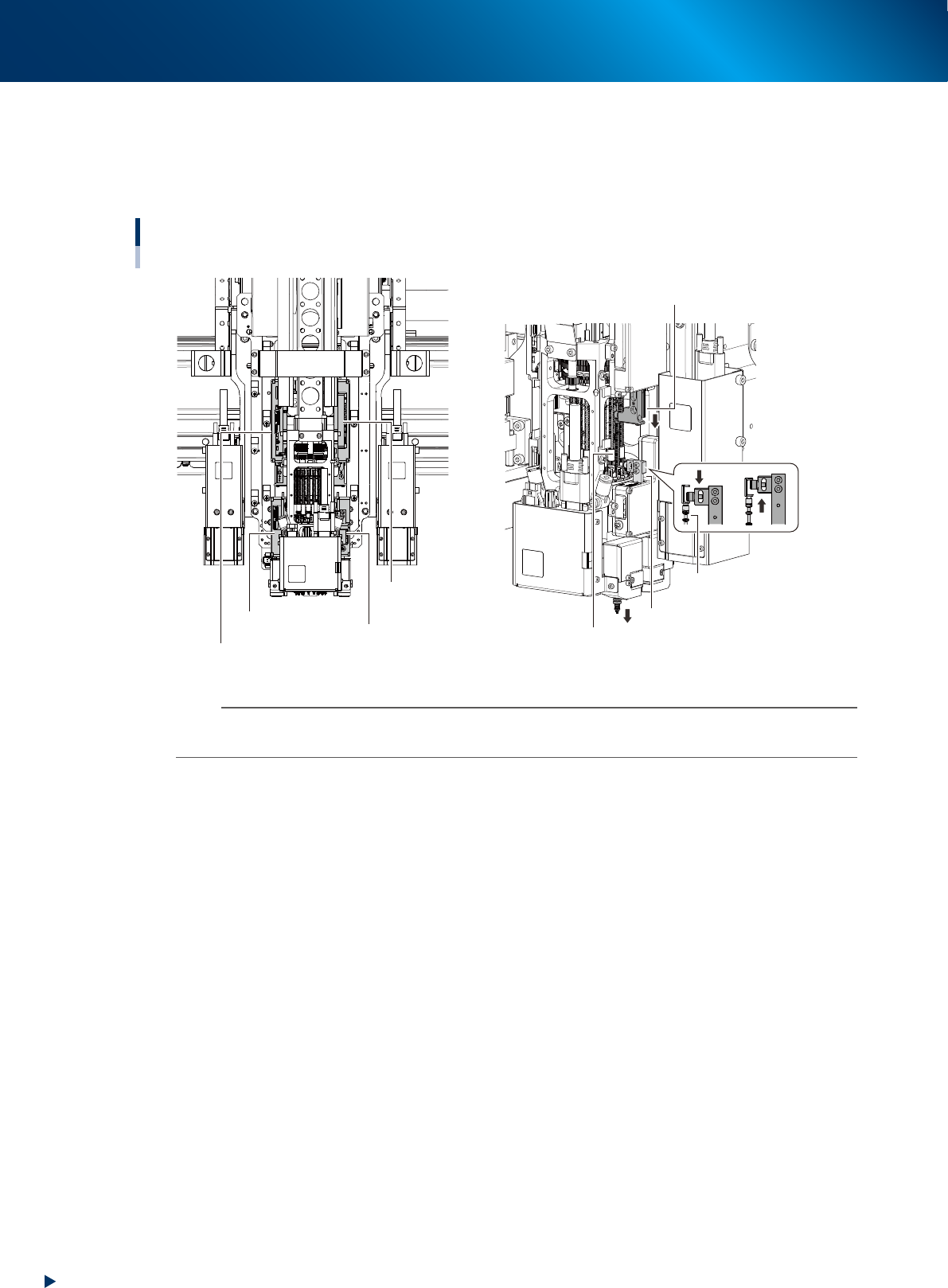
Z-axis unit and V-axis unit are located on both left-and-right sides of RM head unit.
Z-axis unit plays role to descend nozzle shaft by pushing down with a rod upon picking/placing
components.
V-axis unit performs vacuum/air switching required upon component pick-and-place by ascending/
descending spool (mechanical valve).
RM head unit
Z axis/V axis
Rod 1 V-axis unit
Rod 2 V-axis unit
Rod 1 Z-axis unit
Rod 2 Z-axis unit
Rod 1V-axis unit
Rod 1
Nozzle shaft
Spool
23110-KMX-00
n
NOTE
RM head unit does not employ ejector system but does use negative pressure (vacuum) generated by a built in vacuum
pump to pick-up components.
RM head unit makes ascend/descend the head unit except fiducial camera (HZ-axis). This motion enables to
pick/place component of maximum height of 6.5mm.
3. Head unit
1-13
Chapter 1 Unit names and functions
3.1.2 HM Head unit
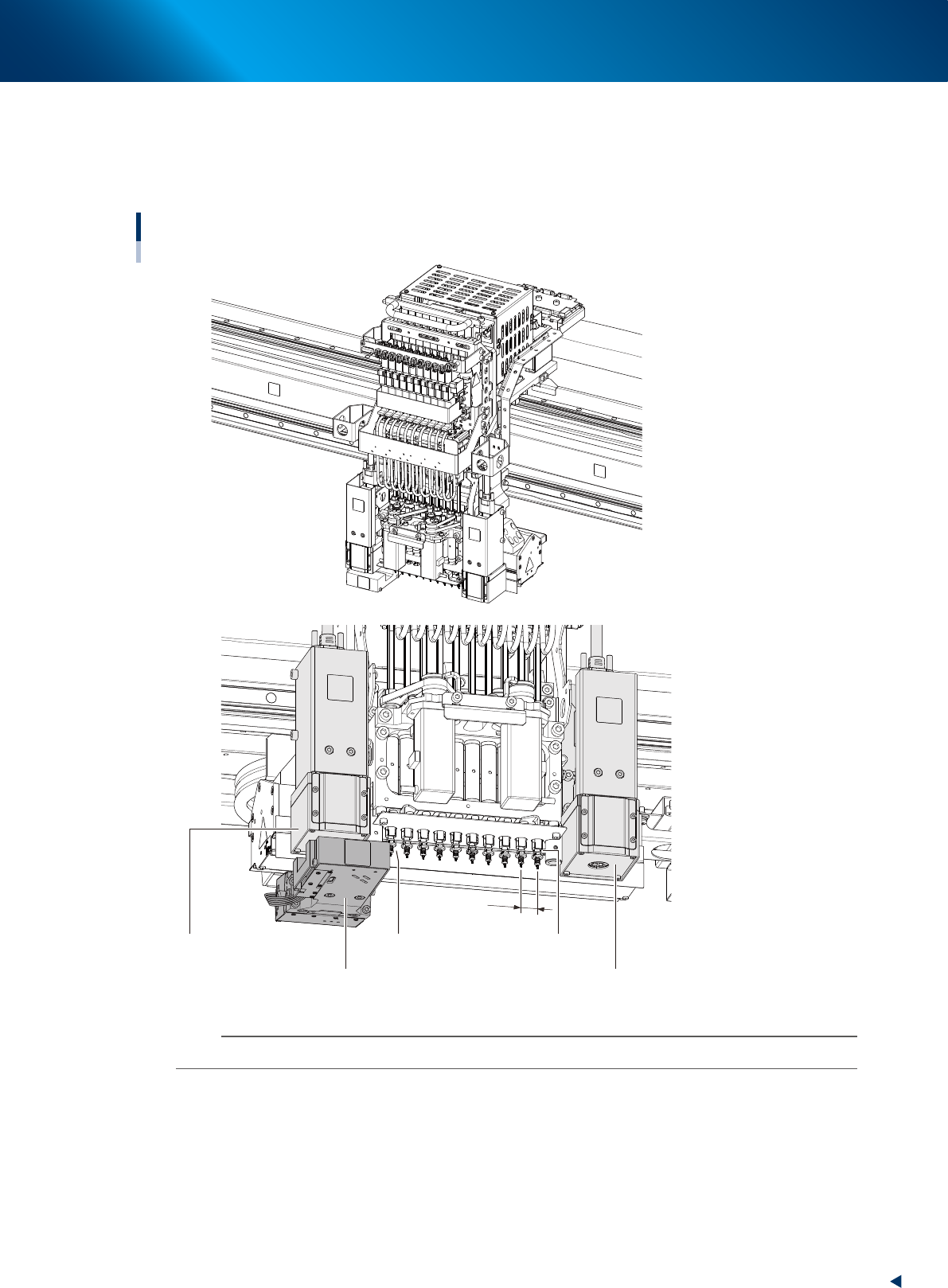
The HM head unit has 10 component pick-and-place heads.
The maximum component pick-up enabled height of each heads is 15 mm.
Two fiducial cameras are located on both sides of head unit, and scan camera unit on bottom.
12mm
RM head unit
Fiducial camera 2
Scan camera unit
Fiducial camera 1
Side-view camera 2
Head 1Head 10
23111-KMX-00
n
NOTE
HM head unit generates negative pressure by ejector system.