YRM20_Ope_E.pdf - 第93页
7. Axis configuration 1-62 Chapter 1 Unit names and functions 7. Axis configuration This section describes the axis configuration and the axis movement direction on this machine. 7.1 Head unit axis configuration 7.1.1 RM …
6. Recognition unit
1-61
Chapter 1 Unit names and functions
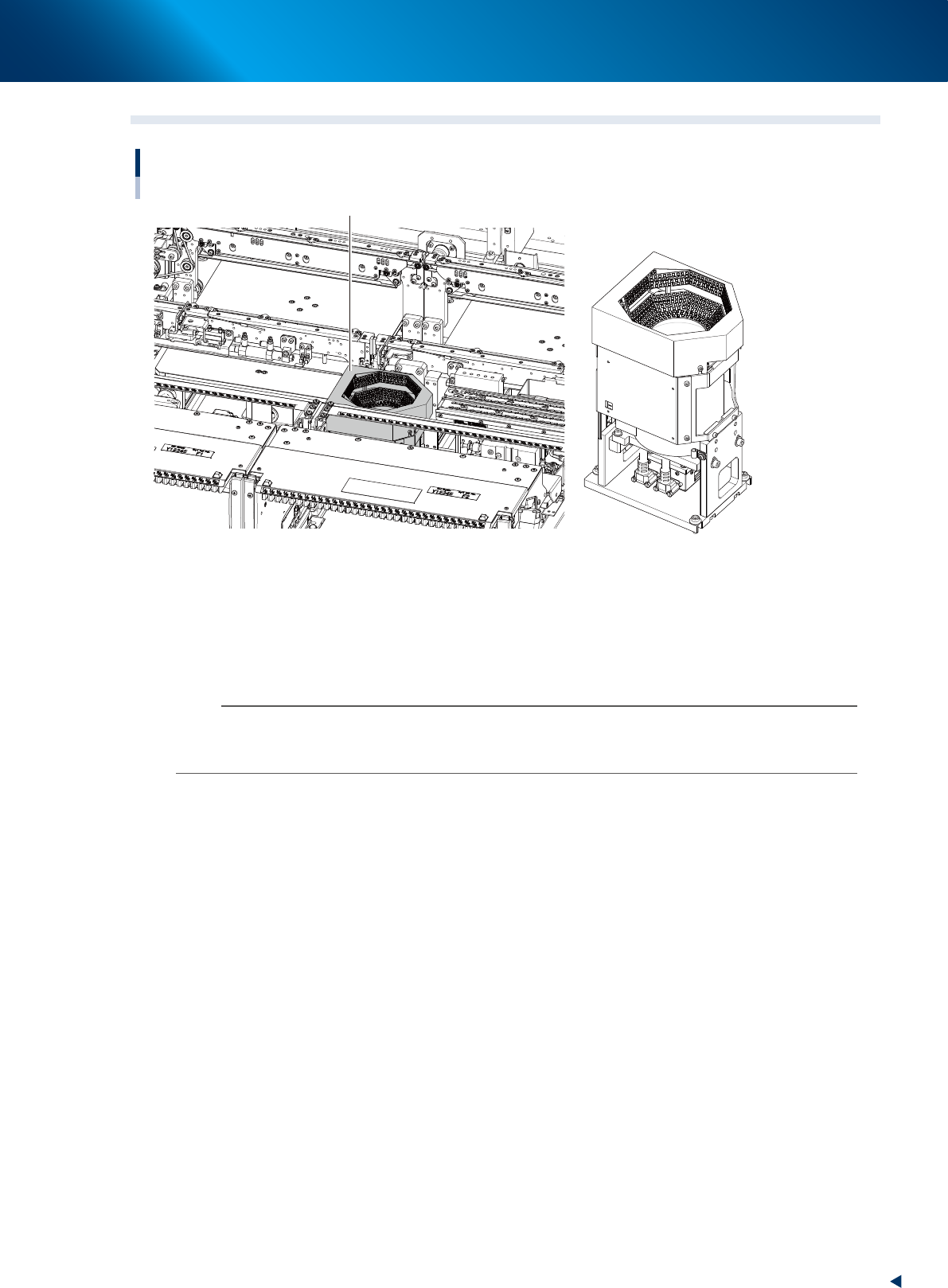
6.3 Multi-view cameras
Recognition unit
Multi-view camera
Multi-view camera
23136-KMX-00
■
Multi-view cameras
The multi-camera recognizes components when the components are mounted with RM head unit or when
the components, which are too big for a scan camera of HM head unit to recognize.
This is installed on either or both of front and rear depending on the head unit selection or its
specification.
n
NOTE
The maximum sizes of components that scan camera equipped to HM head unit can recognize are as below. When the
components size is bigger than this, a multi-view camera is required to recognize the components.
12 mm square, 6.5 mm heigh
7. Axis configuration
1-62
Chapter 1 Unit names and functions
7. Axis configuration
This section describes the axis configuration and the axis movement direction on this machine.
7.1 Head unit axis configuration
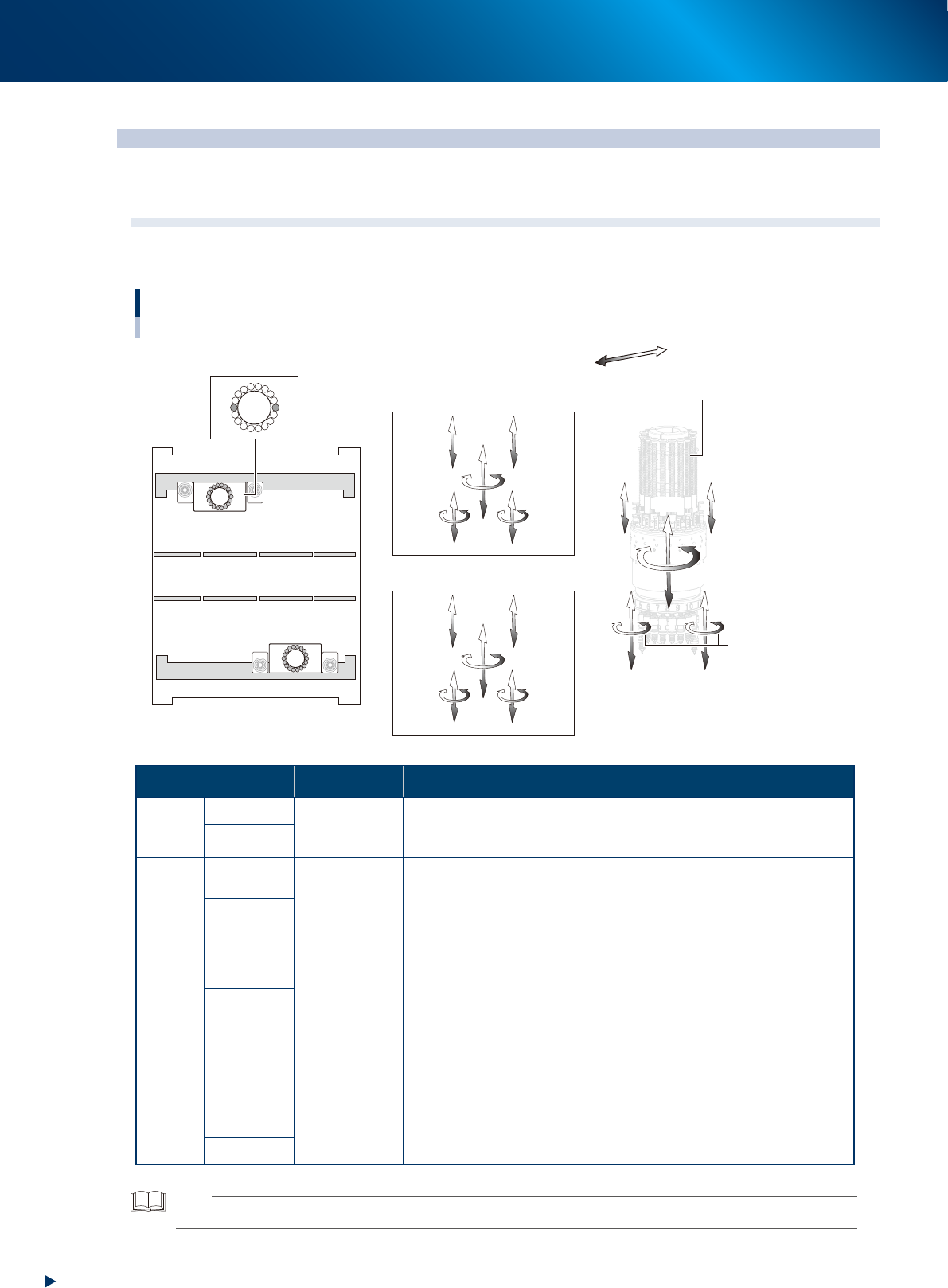
7.1.1 RM head unit
1
1
110
2
18
Head axes configuration of RM head unit
Example as viewed from the machine front
Plus direction
Minus direction
R-axis
Z1-axis
Z2-axis
V1-axis
V2-axis
N-axis
HZ-axis
Front side / Head unit A
Rear side / Head unit B
Rotary
ZA2-axis
RA-axis
ZA1-axis
RA-axis
HZA-axis
NA-axis
VA2-axis
VA1-axis
ZB1-axis
RB-axis
ZB2-axis
RB-axis
HZB-axis
NB-axis
VB1-axis
VB2-axis
Head unit A
Machine front
Head unit B
23137-KMX-00
Axis Specification Function
Z-axis
ZA1, ZA2
Linear motor
Are located at both sides of RM head unit. The components are
picked-up/mounted by ascending/descending the one of 18 nozzle
shafts installed in rotary. Z1-axis is also called rod 1, and Z2, rod 2.
ZB1, ZB2
V-axis
VA1, VA2
Linear motor
Are located at both sides of RM head unit.
The stroke of V-axis is narrower than that of Z-axis. V-axis performs
vacuum/air supply switching for nozzle shaft by ascending/descending
the mechanical valve (spool) of rotary.
VB1, VB2
HZ-axis
HZA
Linear motor
Moves the whole RM head unit up-and-down.
It supports the Z-axis motion upon component picking-up/mounting to
shorten mounting time. Also, the RM head unit ascends upon picking-
up a thick component. Moreover, it ascends to fit to component size,
upon recognizing components, to adjust multi-view camera focus.
Downward is plus direction.
HZB
R-axis
RA-
axis
Motor & gear
Rotates all 18 nozzle shafts inside the rotary at the same time.
The counterclockwise, viewed from above, is plus direction.
RB-
axis
N-axis
NA-
axis
Motor & gear
Rotates whole rotary.
The clockwise direction, viewed from above, is plus direction.
NB-
axis
TIP
The front head unit is called "head unit A", and the rear, "head unit B".
7. Axis configuration
1-63
Chapter 1 Unit names and functions
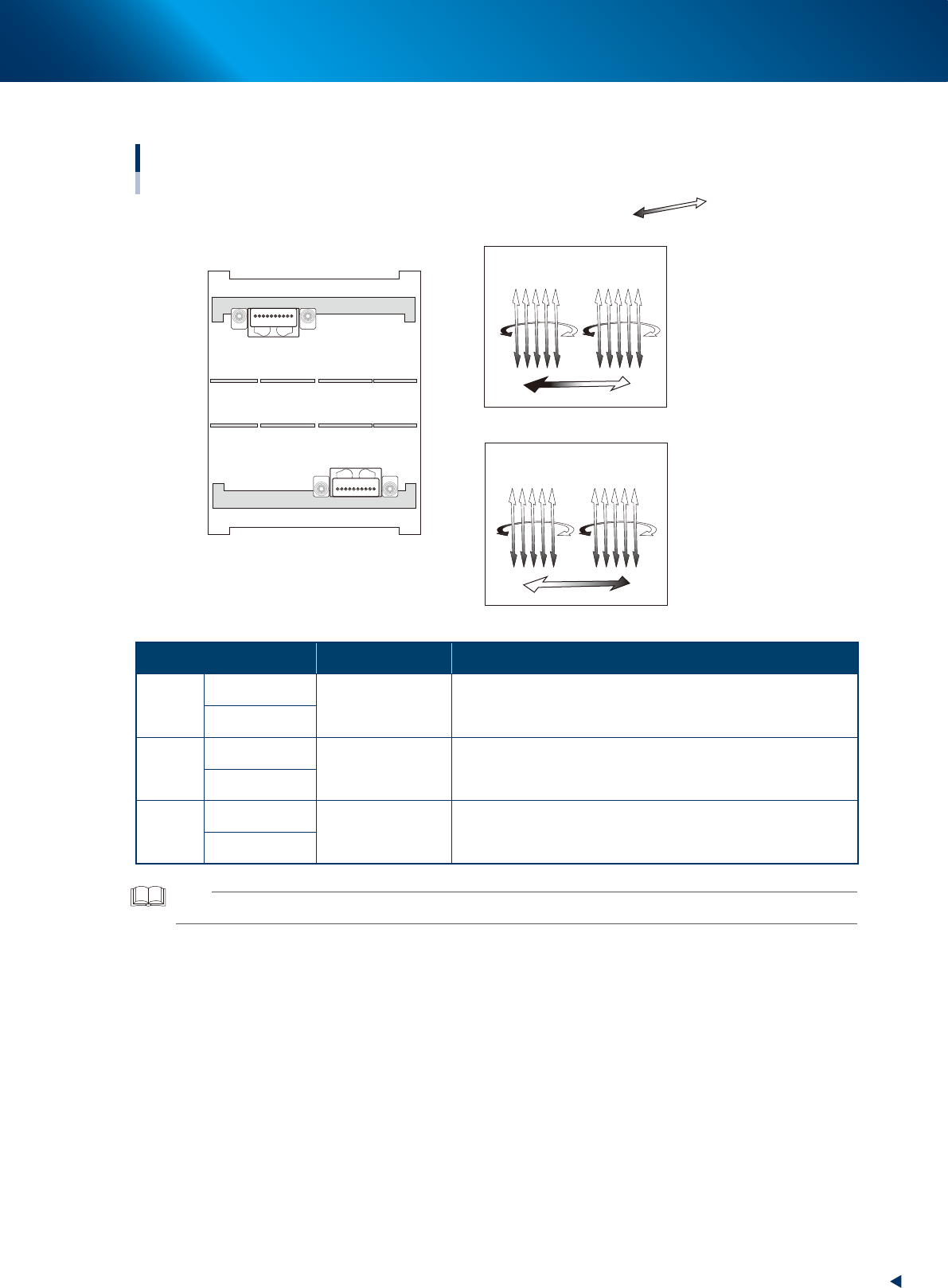
7.1.2 HM head unit
10
1
1
10
Head axes configuration of HM head unit
Example as viewed from the machine front
Plus direction
Minus direction
RA1-axis
RB1-axis
RA2-axis
RB2-axis
SCB-axis
SCA-axis
Front side / Head unit A
ZB1ZB10 ZB6 ZB5
ZA10ZA1 ZA5 ZA6
Head unit A
Machine front
Head unit B
Rear side / Head unit B
23138-KMX-00
Axis Specification Function
Z
axis
ZA1 to ZA10
Linear motor
Moves up-and-down the picking-up/mounting heads.
The downward is plus direction.
ZB1 to ZB10
R
axis
RA1, RA2
Motor and timing
belt
Rotates 5 nozzle shafts as unit using 2 motors, R1 and R2.
The counterclockwise, viewed from above, is plus direction.
RB1, RB2
SC
axis
SCA
Linear motor
Moves scan camera from side to side.
The direction from the head No. 1 to the No. 10 is plus
direction.
SCB
TIP
The front head unit is called "head unit A", and the rear, "head unit B".