YRM20_Ope_E.pdf - 第89页
6. Recognition unit 1-58 Chapter 1 Unit names and functions 6. Recognition unit This machine uses a fiducial camera to recognize marks and a multi-camera, a scan camera and a side- view camera to recognize components as …
5. Conveyor
1-57
Chapter 1 Unit names and functions
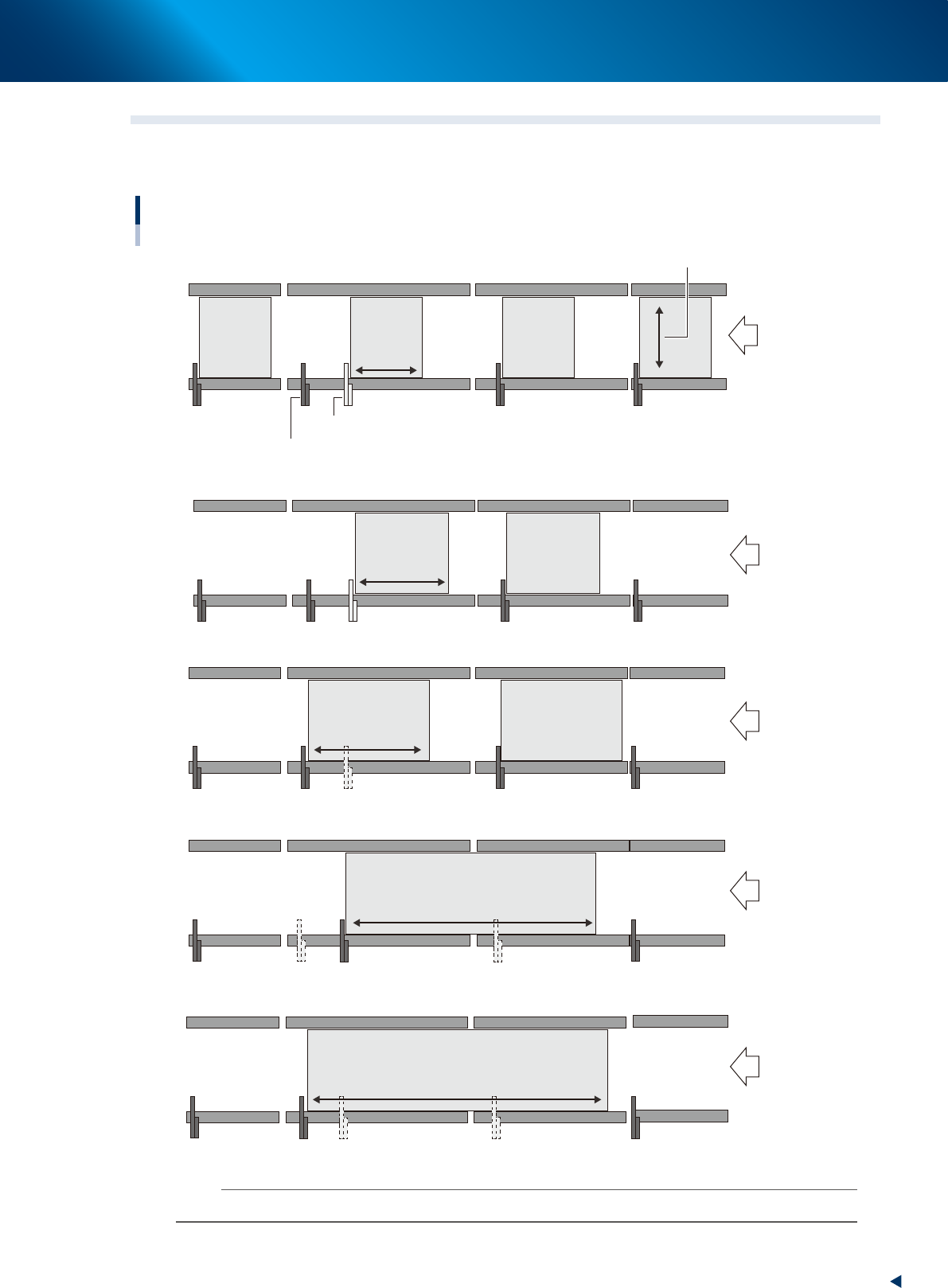
5.3 Board position in machine by board size
The board stay position in YRM20 machine varies depending on the carried-in board size.The following
figures describe each position.
Relation between board position and board size
L ≥ 210 mm: 4 boards can stay in machine
L ≥ 210 mm
W ≥ 510 mm
Main stopper 1
Main stopper 2
L ≥ 305 mm: 2 boards can stay in machine
L ≥ 305 mm
L ≥ 380 mm: 2 boards can stay in machine
L ≥ 380 mm
L ≥ 720 mm: 1 board can stay in machine
L ≥ 720 mm
L ≥ 810 mm
L ≥ 810 mm: 1 board can stay in machine
23134-KMX-00
n
NOTE
YRM20 supports the board size of L810mm x W510mm to L50mm x W50mm.
6. Recognition unit
1-58
Chapter 1 Unit names and functions
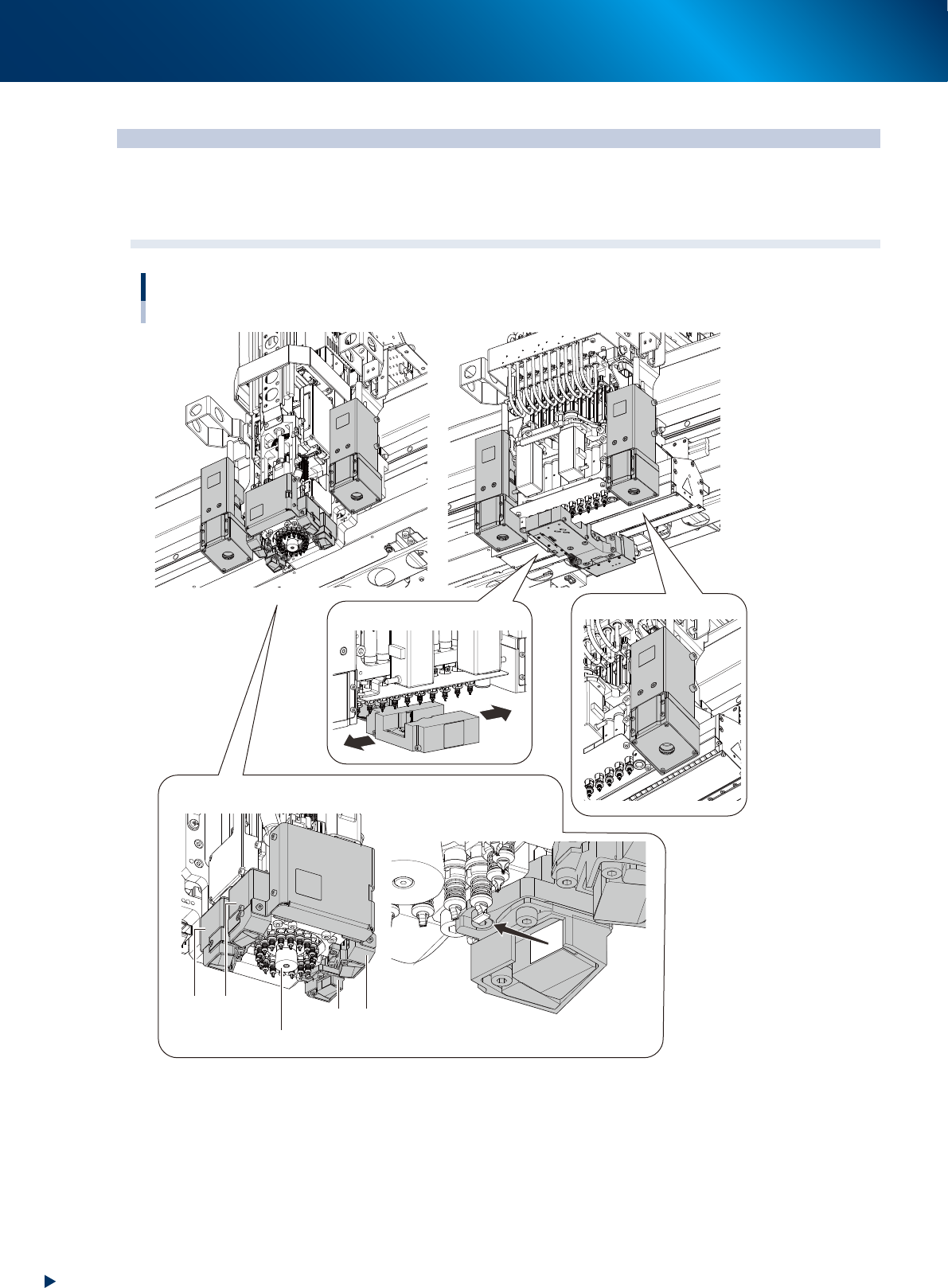
6. Recognition unit
This machine uses a fiducial camera to recognize marks and a multi-camera, a scan camera and a side-
view camera to recognize components as the recognition units.
6.1 Fiducial, Scan and Side-view camera
Recognition unit
RM head unit / HM head unit
1 2
4 3
Side-view camera diffusion cylinder
Fiducial camera
Scan camera
Side-view camera
23135-KMX-00

6. Recognition unit
1-59
Chapter 1 Unit names and functions
■
Fiducial cameras
RM head unit and HM head unit are equipped with this camera at side. This is used to recognize
fiducial marks and to perform teaching for components mounting position. The head unit has two
fiducial cameras at both sides in order to extend the sight.
■
Scan camera
HM head unit is equipped with this camera at bottom. After components are picked up, this camera
moves left and right to recognize the picked component while the head unit moves to the mounting
position. This has also the side-view function as standard.
■
Side-view camera
RM head unit is equipped with this camera at bottom. This camera takes from side the images of
component being picked-up by nozzle. RM head unit is equipped 4 side-view cameras and the rotary
rotates after picked-up component to move the nozzle picking-up component in front of the nearest
camera and then component recognition is performed.