KE-2070_80_80R使用说明书(管理员).pdf - 第118页
操作手册Ⅱ 2-74 2-3-7-2设置项目 QFP、连接器等的引脚元件采用俯视图,BGA等球面元件采用仰视图来制作。 <QFP(俯视图)> <BGA> 1) “元件名” 、…
操作手册Ⅱ
2-73
2-3-7图像数据
用VCS摄像机输入用于元件定心的信息。
图像定心,即是通过VCS摄像机识别元件的明亮部分(引脚、球形等),进行定心。
另外,通过图像定心还可检测出引脚弯曲、球形变形等不良状况。
为了进行定心、检测不良状况,必须在图像数据中输入引脚、球形等尺寸,及设置不良状况
的检测级别等。
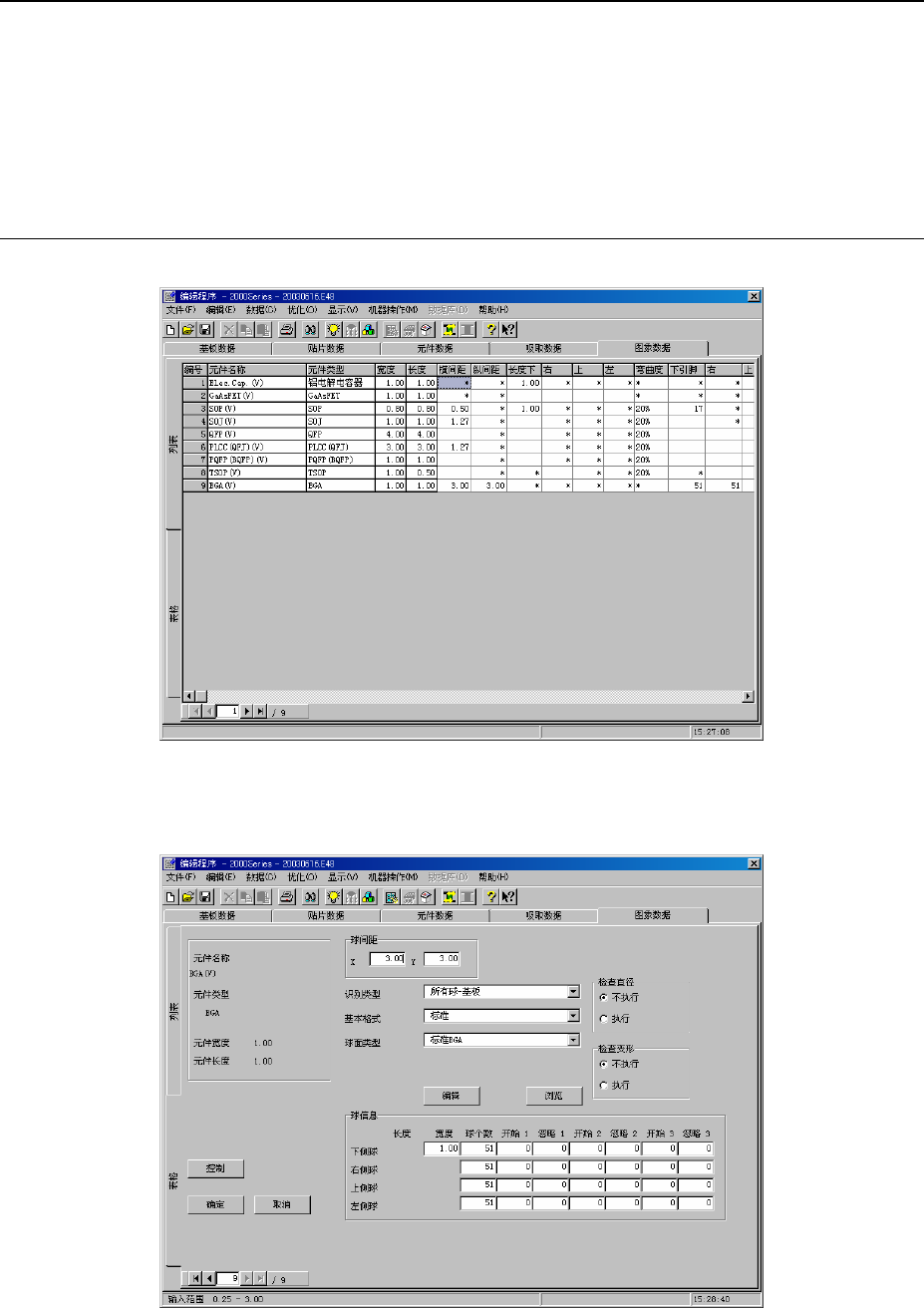
2-3-7-1图像数据画面显示
显示图像数据后,先打开列表画面。从列表画面可看到图像数据的一览,还可进行编辑。
双击元件名或单击画面左侧的“表格”标签,则打开下面的表格画面。
表格画面因元件种类而异。
操作手册Ⅱ
2-74
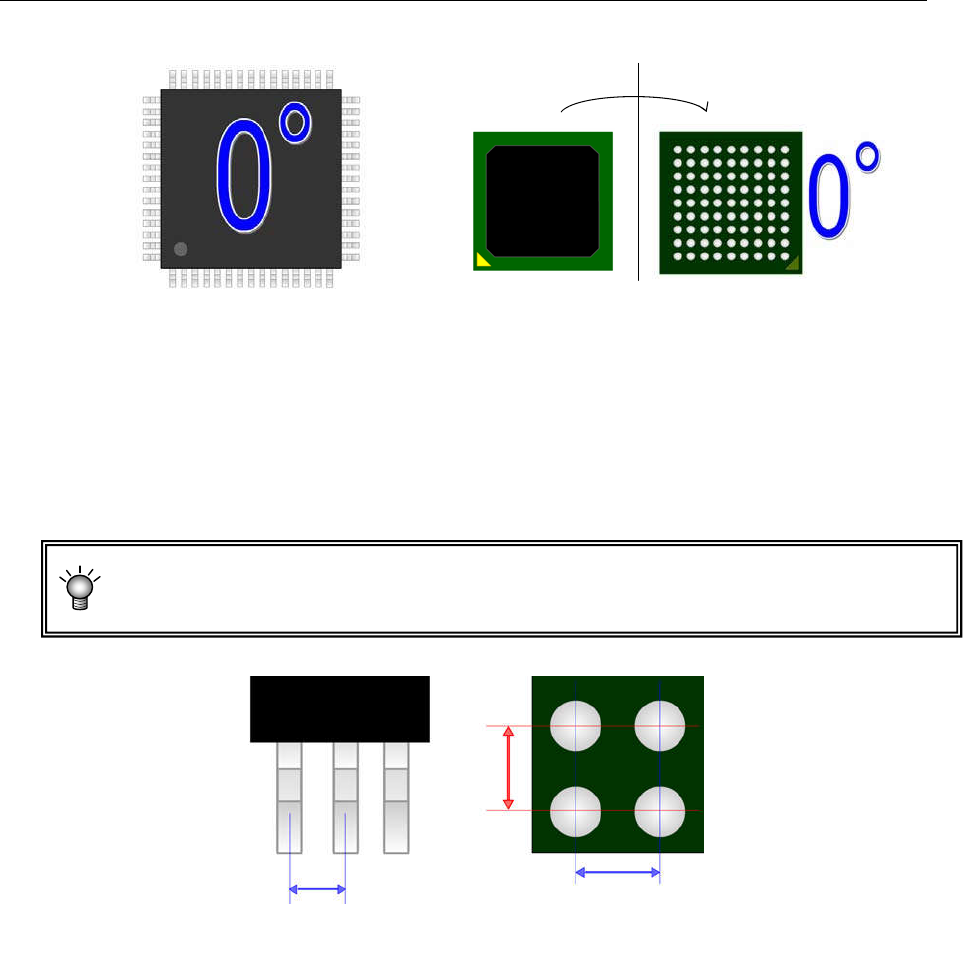
2-3-7-2设置项目
QFP、连接器等的引脚元件采用俯视图,BGA等球面元件采用仰视图来制作。
<QFP(俯视图)> <BGA>
1)“元件名”、“元件种类”、“元件尺寸(横、纵)”
显示“元件数据”中已输入的值。变更时,请用“元件数据”进行。
2)间距(X、Y)
输入引脚间或球面间(从引脚或球面中心到下一个引脚或球面中心)的距离。
请正确输入“间距”值。“外形尺寸”、“引脚长度”等虽然有一定的盈余,但对于“间距”
来说,即使有 10
µ
m(0.01mm)的误差也可能会发生识别错误。
俯视图
仰视图
引脚间距
球间距
操作手册Ⅱ
2-75
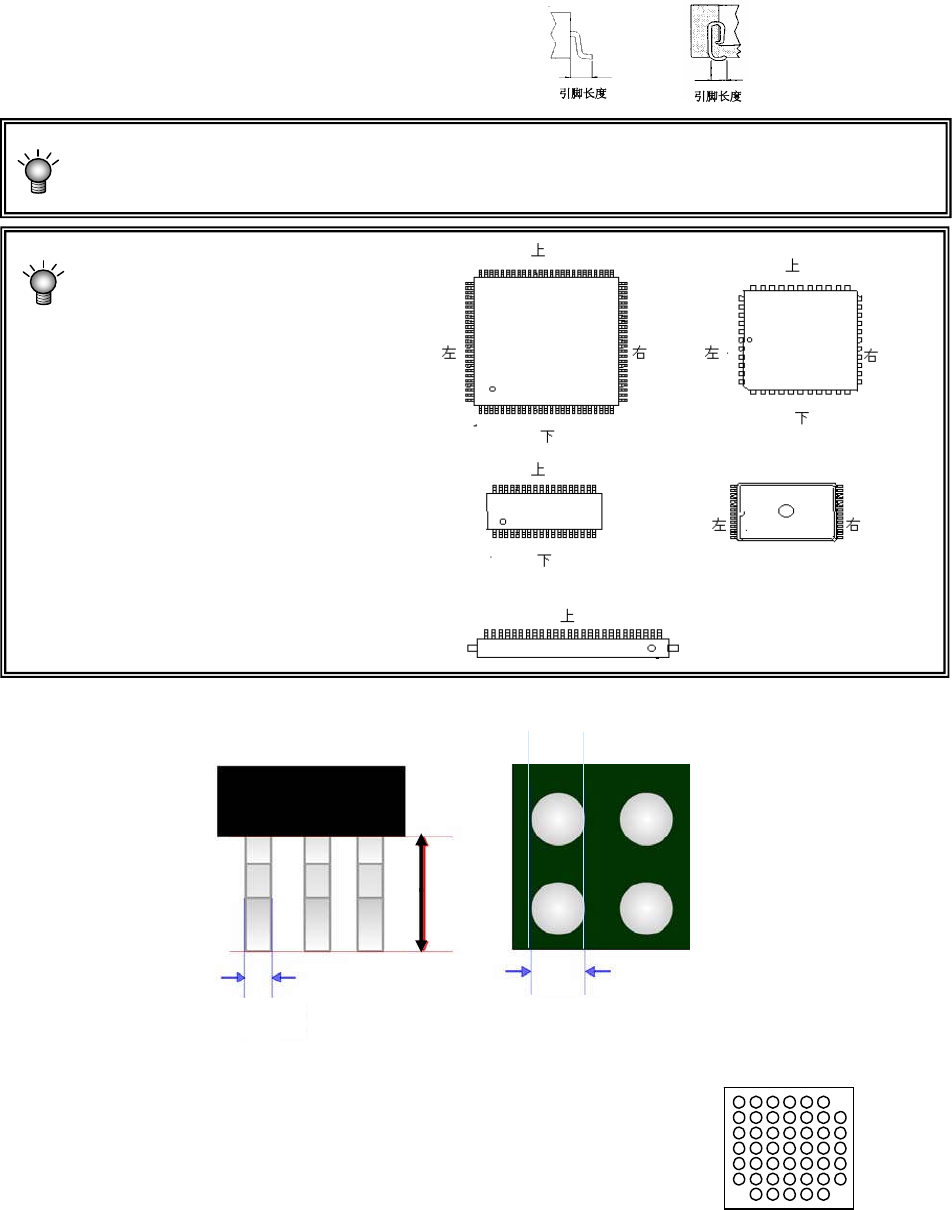
3)引脚的长度下、右、上、左
输入引脚的长度。有下、右、上、左的输入位置,根据元件种类决定需要的输入位置。对于
QFP,由于4个方向长度相同,只需输入1处(长度下)。(显示*标记的项目不需要输入。)
输入用 VCS 识别的长度值。当为 QFJ 时,由于直到模部内侧(元件底部)都有引脚,因此
可输入比从上面看的长度稍大些的值。
4)宽度
输入引脚宽度或球的直径。
5)下、右、上、左
输入各个方向的引脚数或球数。
即使为缺球的BGA,也请输入假定无欠缺状态时的数目。
关于球欠缺部位,在下一页“7)欠缺开始/欠缺数”画面中输入。
当为如下图的BGA时,下、右、上、左都输入“7”。
图像数据中的“下、右、上、左以
本装置中所定义的 0 度的贴片方
向为基准来表示。”
仰视图
引脚宽度
球宽度
引脚长度