KE-2070_80_80R使用说明书(管理员).pdf - 第148页
操作手册Ⅱ 2-104 例 1)多引脚元件 例 2)复合阵列元件 3) 版面检查 设定相对于引脚间距或球间距的中心偏差的容许范围。 4) 元件尺寸(元件外形尺寸) 当为引脚元件时,通过输入尺寸…
操作手册Ⅱ
2-103
2-3-8-5-1元件组/元件格式的制作
在图2-3-8-5-2的画面中单击“追加”按钮,显示如下画面。
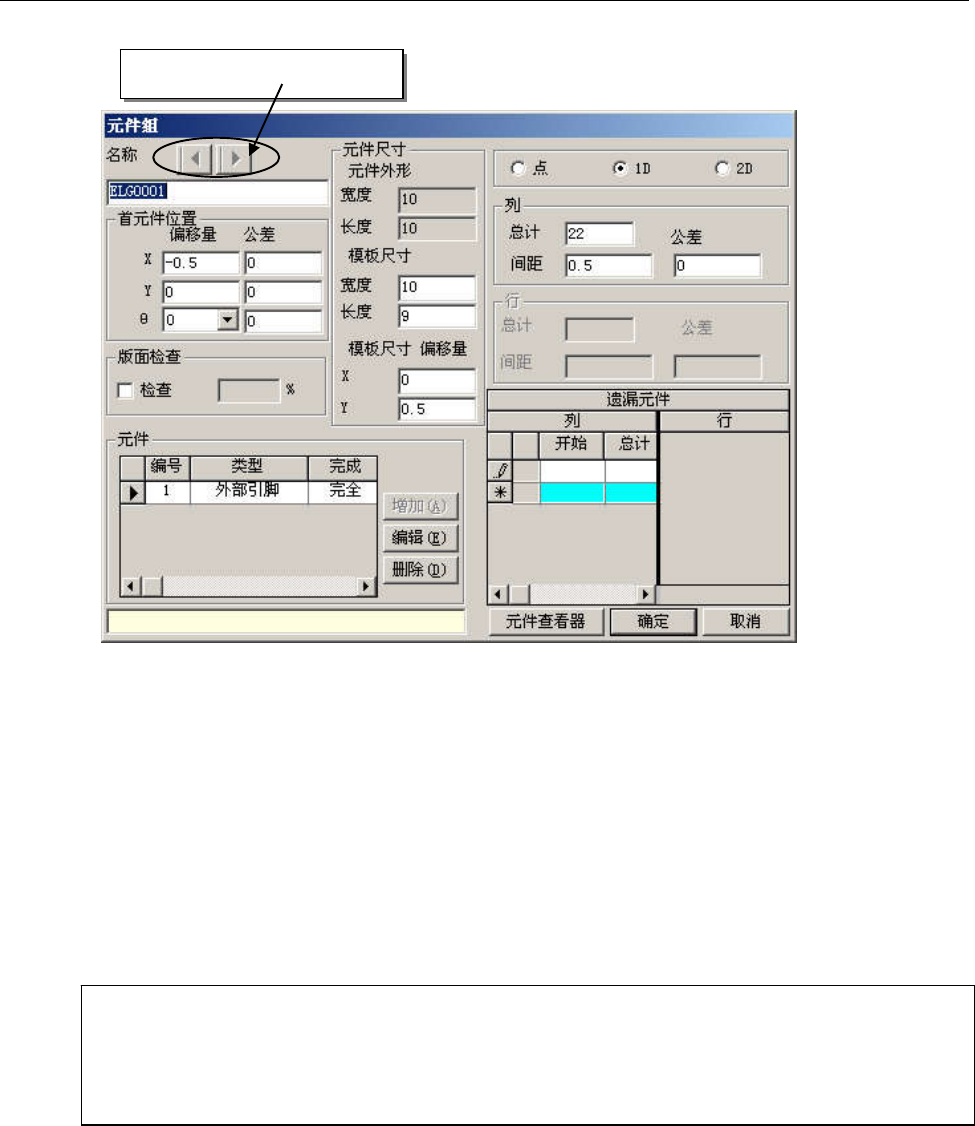
【元件组制作画面】
1) 名称:请输入元件组名,英文、数字字符最多 32 个。
2) 首元件位置:输入由元件识别中心位置到首元件的距离。
●偏移量
◇X,Y:当为多引脚元件时,输入到首元件的顶端中心的距离;当为复合阵列元件时,输入到
首元件中心的距离。
※请正确输入尺寸。如果元件组之间的尺寸误差超过±0.05mm,则有可能无法识别。
◇θ: 仅当多引脚元件时输入。引脚在下边时输入“0°”;在右边时输入“90°”;在上边时
输入“180°”;左边时输入“270°”。
※首元件
·多引脚元件:和QFP等的考虑方法一样,当元件组在下边时为最左、右边时为最下,上边时
为最右,左边时为最上的元件。
·复合阵列元件:为元件组左下的元件。
●公差: 可设定相对于设定值的容许范围,目前请在初始值为“0”的状态下使用。有关“元
件”内的所有的“容差”,请使用“0”。
显示上、下一元件组数据。
操作手册Ⅱ
2-104
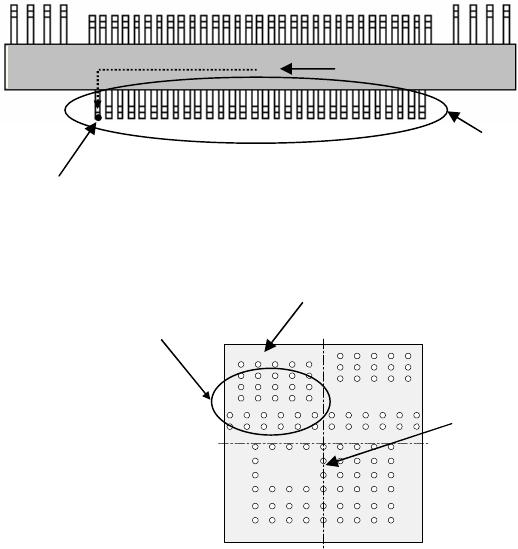
例 1)多引脚元件
例 2)复合阵列元件
3) 版面检查
设定相对于引脚间距或球间距的中心偏差的容许范围。
4) 元件尺寸(元件外形尺寸)
当为引脚元件时,通过输入尺寸,正确显示元件查看器(参见2-3-8-6章)。
●元件外形:显示“元件数据”中输入的值。
●模板尺寸:输入模板的尺寸。
●模板尺寸偏移量:通过输入模板的尺寸与模板的偏移量,可更加准确地显示引脚元件。
该功能是仅对于元件查看器的输入项目,若用户不输入,则显示元件外形尺寸。
5) 点、1D、2D
●点:在元件组仅存在一个元件时选择。
●1D:象引脚元件一样,当元件呈1列排列时选择。
●2D:BGA元件等,当元件呈纵横方向排列时选择。
6) 列、行
选择了1D或2D情况时,输入引脚或球的个数和间距。
7) 遗漏元件
在元件组内有遗漏时,按距离首元件近的顺序来设定遗漏信息。对于1列或1行,最多可设定4个
遗漏信息。
Bot t om Vi e
w
元件组
+
首元件的配置位置(θ=0°)
首元件的配置位置
元件识别中心位置
元件组
元件识别中心位置
操作手册Ⅱ
2-105
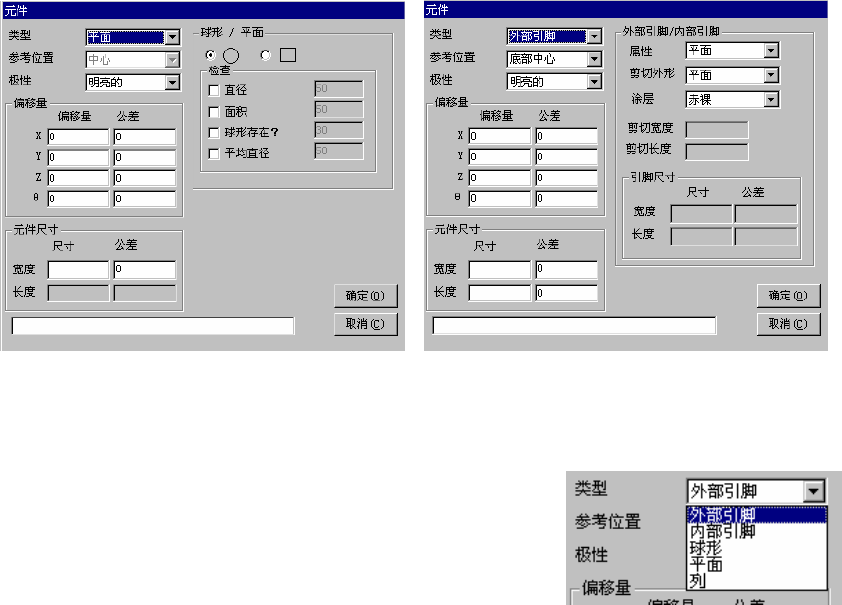
8) 元件
输入元件信息。
选择了球或平面时的画面选择了外部引脚或内部引脚时的画面
●类型
选择元件的类型。显示一览表根据上页“④”
中的指定而变化(右图为选择了“1D”时)。
◇外部引脚:鸥翼形引脚(QFP 等)。
◇内部引脚:J 形引脚(QFJ 等)。
◇列:有高度的球或平面。
◇标记:因为是标记而非电极,所以不用检查。
◇边:因元件形状不规则,只有用边才能取得。
◇角:因元件形状不规则,只有用角才能取得。
有关设定方法请参见下页。
●参考位置(基准位置)
可指定首元件的基准位置。推荐对引脚元件指定“下底面的中心(引脚顶端的中央)”,对球形
元件指定“元件的中心(球的中央)”。
●极性
指定元件的明亮度。如元件比背景亮时,请选择“明亮”。
●偏移量
需要比元件组的“首元件的配置”更偏离时指定。
●元件尺寸
输入元件的纵、横尺寸。