RX-8_说明书(1).pdf - 第145页
4 操作篇 4-3 生产 63 4 (f) 移动到空洞中心 位置 使摄像机向对象供给部的空洞中心位 置移动。 (g) 移动速度 从[低速]、[中速]、[高速]中选择十字标记 的移 动速度、或 XY 轴的移动速度。 (h) 微调动作移动 触摸此按钮可切换微调移动 模式与十字标记移动模式。 蓝色的状态为微调动作移动 模式。 (i) 移动按钮 移动摄像机图像上的十 字标记。 在微调动作移动模式下 ,将使对象单元贴片头的 XY 轴(摄像机图像显…
4 操作篇
4-3 生产
62
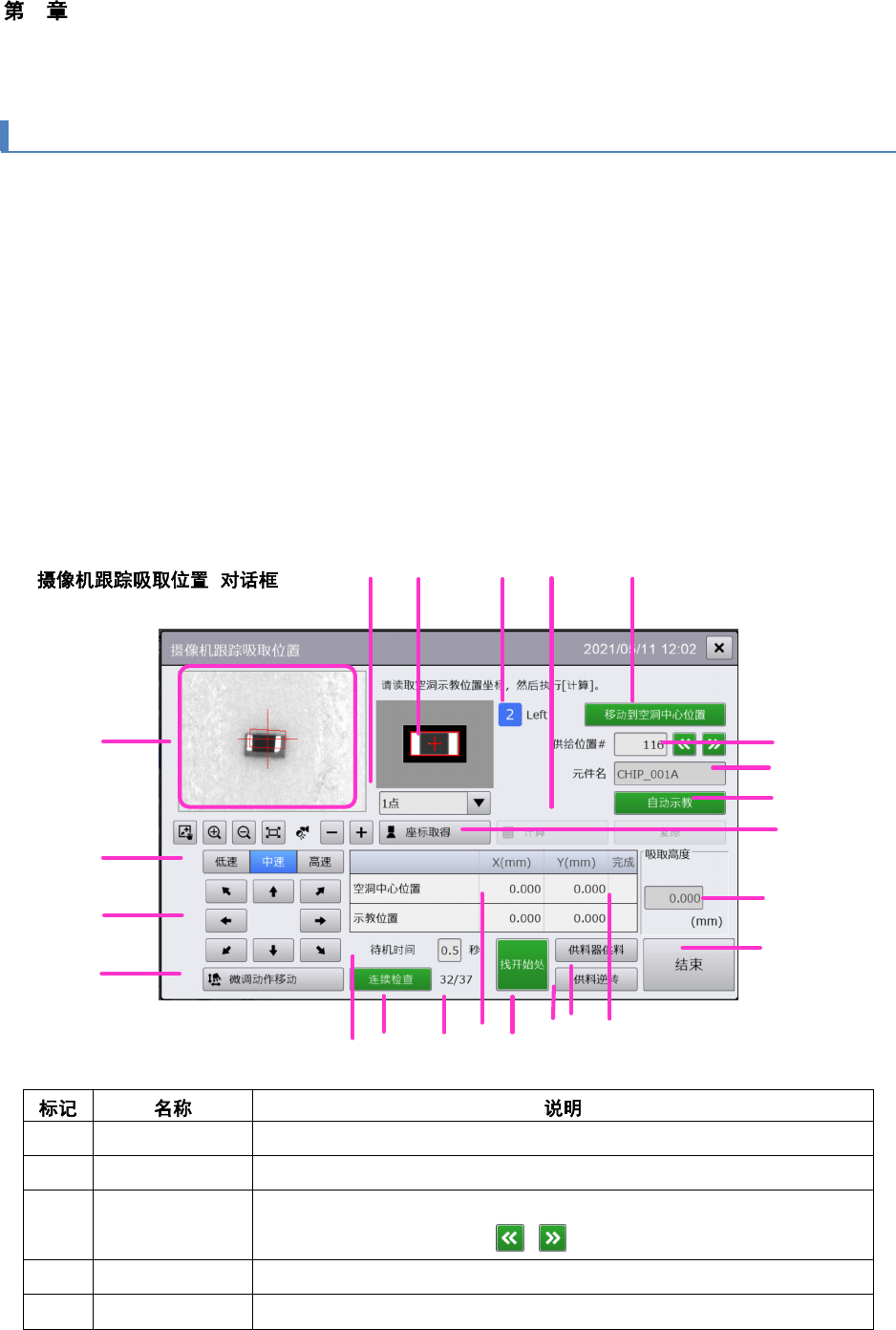
4-3-10. 摄像机跟踪吸取位置功能
摄像机跟踪吸取位置功能是在元件吸取前通过 OCC 显示吸取位置,以便进行目视确认的功能。还可暂停跟
踪动作,通过自动或手动对要进行空洞示教的元件的吸取位置进行调整。
试打条件的 [吸取(摄像机)跟踪] 设定为 [自动输送] 或 [手动输送] ,触摸[START] 按钮即显示 [摄像机跟
踪吸取位置] 对话框。
将[机器设置] – [功能设定] 的 [跟踪功能] 的项目[供料器交换后,重新运行时跟踪吸取] 设定为 ON 后,可在
进行供料器更换后,通过按 [START]按钮开始生产时,进行吸取位置摄像机跟踪,通过摄像机确认吸取位
置。
如果要在准备阶段进行吸取位置摄像机跟踪,也可以从[准备] – [吸取跟踪]画面以及[元件缺料] 对话框执行
跟踪功能。
因生产中发生元件未吸取错误或站立吸取错误等而显示 [警报]对话框时,按下[警报]对话框所显示的[摄像机
跟踪吸取位置]快捷方式按钮,将对发生错误的元件供给位置执行吸取位置的摄像机跟踪,可以利用摄像机
确认吸取位置。
吸取位置的跟踪动作,将按照从单元 1 侧向单元 2 侧的顺序进行。
n [ ]
(a)
示教点 显示要进行示教的坐标位置。如果有多个,可在画面上显示以便选择。
(b)
监视器 通过下拉列表选择要进行坐标取得的点数,以便计算空洞的中心位置。
(c)
供给位置# 显示示教对象的供给位置编号。
触摸文本区域输入,或触摸 / 选择。
(d)
元件名 显示要进行示教的元件名。
(e)
摄像机图像 显示操作对象单元贴片头的摄像机图像。
g
i
h
a
s
b
e
t
c
d
p
m
f
v
n
l
k
r
q
j
u
o
w
4 操作篇
4-3 生产
63
4
(f)
移动到空洞中心
位置
使摄像机向对象供给部的空洞中心位置移动。
(g)
移动速度 从[低速]、[中速]、[高速]中选择十字标记的移动速度、或 XY
轴的移动速度。
(h)
微调动作移动 触摸此按钮可切换微调移动模式与十字标记移动模式。
蓝色的状态为微调动作移动模式。
(i)
移动按钮 移动摄像机图像上的十字标记。
在微调动作移动模式下,将使对象单元贴片头的 XY 轴(摄像机图像显
示的中心位置)微调移动。
(j)
坐标值列表 显示示教处理前后的各供应位置吸取位置的坐标值。
•
空洞中心位置:示教前的吸取中心位置
•
示教位置:示教后的吸取中心位置
(k)
待机时间 设定触摸[连续检查]时,摄像机的待机时间。
(l)
连续检查 在摄像机图像中连续显示供应部的空洞中心位置。
(m)
坐标取得 /计算
/复原
•
[坐标取得]:将摄像机图像中心十字标记的位置作为坐标数据取
得并保存。
•
[计算]:示教点为
2
点时,计算空洞位置,更新坐标值列表的示
教位置。
•
[复原]:将坐标值列表示教位置的值复原为示教前的值。
(n)
供料 进行控制,从带式供料器输送元件,使正确的空洞位置显示在[摄像机
图像]中。
(o)
逆供料 使带式供料器元件后退。
后退时还同时实施空洞的位置决定动作。
(p)
自动示教 进行空洞位置的自动示教。
如果是不能进行自动空洞示教条件的元件,按钮会变为无效。
(q)
示教结果 进行示教时,会显示 OK。
(r)
吸取高度测量结
果
显示吸取高度测量结果。
未实施时,显示「-」。
(s)
全体跟踪位置 显示当前显示中的跟踪位置/跟踪对象的总数。
(t)
跟踪实施中单元 显示当前跟踪实施中的单元。
(u)
结束 结束跟踪动作。
(v)
无元件 对象供给部发生元件缺料时,将显示[強制解除]按钮或[強制]按
钮。
跟踪供给位置后确认不是无元件状态时,操作这些按钮可解除元件缺料
状态。
(w)
找出元件
执行找出元件动作。用
O
CC
拍摄空洞位置,一直传送直至判断有元
件。未判断为有元件时,传出次数为在机器设置中设定的检测个数的
设定次数。
在机器设置或者在元件数据处,设置为不找出元件时,此按钮无效。
4 操作篇
4-3 生产
64
n
• 手动输送时
如果在吸取摄像机跟踪中选择了 [手动输送],将显示[摄像机跟踪吸取位置] 对话框,进入暂停状态。
要指定下一个要确认的供应位置时,请触摸 或 。
• 自动输送时
如果在吸取摄像机跟踪中选择了 [自动输送],摄像机仅按照在待机时间中指定的时间停止在吸取位置
上空后,自动移动到下一个吸取位置。按照供应部编号的升序进行跟踪,左右单元的最后吸取位置显
示完成后即停止。
要使自动输送暂停时,请触摸 [STOP] 按钮。在暂停中触摸 [STOP] 按钮时,将在显示中的吸取位置
停止。在移动动作中触摸 [STOP] 按钮时,将在下一个吸取位置停止。在暂停状态下可进行空洞示教。
要重新开始跟踪动作时,请触摸 [连续检查] 按钮。
n
• 自动空洞示教
触摸[自动示教] 按钮后,将进行显示中的供应位置自动空洞示教处理,更新显示示教结果。不能执行
自动示教的元件,请进行[手动空洞示教]。
• 手动空洞示教
当生产中频繁发生吸取错误,或要提升微小尺寸元件的吸取率时,可使用十字标记手动指定空洞位置,
示教元件的吸取中心位置。手动空洞示教的操作与从[生产补助] – [元件吸取调整] 画面显示 [空洞示
教] 对话框,触摸该画面上的 [手动示教] 按钮显示的 [手动空洞示教] 对话框的操作方法相同。(有关
手动空洞示教功能的详情,请参见「4-15-2 调整吸取位置」。)