RX-8_说明书(1).pdf - 第342页
4 操作篇 4-12 编辑数据库 260 贴片高度补正 输入贴片位置高度方向的补正值。 废弃位置 指定元件的废弃位置。 • Box :废弃到废弃箱 • 保护废弃:手动操作,用手取下元件 补料吸取次数 指定发生错误之前连续发生未吸取或芯片 站立的次 数:在 0 ~ 9 的范围 内选择。 未吸取时为发生无元件错误 ,芯片站立时为发生带 式供料器不良错 误。 重复次数 发生元件识别错误时重新识别的次数, 在 0 ~ 9 的范围内选择。 重复指…
4 操作篇
4-12 编辑数据库
259
4
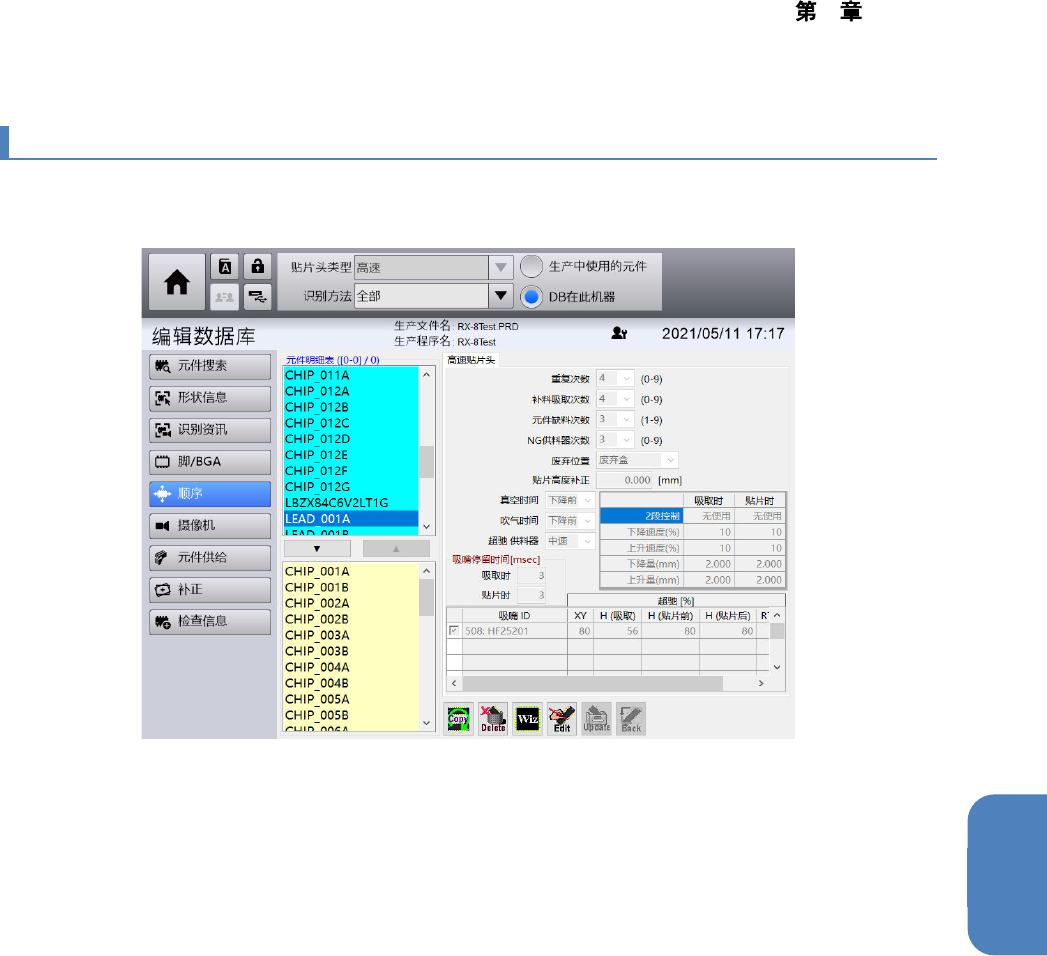
4-12-6. 元件的吸取、贴片顺序画面
可显示和编辑本机装置内 DB 或者程序中元件资料库中记录的元件资料之吸取和贴片顺序信息。
4 操作篇
4-12 编辑数据库
260
贴片高度补正 输入贴片位置高度方向的补正值。
废弃位置 指定元件的废弃位置。
•
Box
:废弃到废弃箱
•
保护废弃:手动操作,用手取下元件
补料吸取次数
指定发生错误之前连续发生未吸取或芯片站立的次数:在 0~9 的范围
内选择。
未吸取时为发生无元件错误,芯片站立时为发生带式供料器不良错
误。
重复次数 发生元件识别错误时重新识别的次数,在 0~9 的范围内选择。
重复指定次数后仍发生识别错误时,将废弃该元件,开始下一个元件
的吸取动作。
元件缺料次数 输入判定为无元件错误前所连续发生的吸取错误次数,输入范围为
1 ~ 9。
NG 供料器次数 输入判定为带式供料器不良的错误前连续发生吸取错误或芯片站立错
误的次数,输入范围为 0 ~ 9。
吸嘴停留时间
(吸取时)
输入为使吸取动作稳妥,吸嘴在吸取位置(下降位置)停留的时间。
吸嘴停留时间
(贴片时)
输入为使贴片动作稳妥,吸嘴在贴片位置(下降位置)停留的时间。
真空时间 执行吸取动作时选择什么时候使真空为 ON,是在吸嘴下降完成前还
是完成后。
•
下降前:初始值
•
下降后:下降完成后真空
ON
吹气时间 执行贴片动作时选择什么时候使吹气为 ON,是在吸嘴下降完成前还
是完成后。
•
下降前:初始值
•
下降后:下降完成后吹气
ON
4 操作篇
4-12 编辑数据库
261
4
2 阶段控制
(吸取时)/(贴片时)
吸嘴在执行吸取动作或者贴片动作时,分为吸嘴下降、上升 2 阶段动
作速度,在吸嘴的下降端之前和之后切换为低速动作,从而保证了柔
性吸取/柔性贴片。
是否实施 2 阶段控制,可以在吸取时和贴片时分别进行选择。
•
不使用:不使用
2
阶段控制
•
仅下降:仅在吸嘴下降动作处使用
2
阶段控制
•
仅上升:仅在吸嘴上升动作处使用
2
阶段控制
•
下降/上升:在吸嘴下降、上升动作时均使用
2
阶段控制
在吸嘴下降动作中使用 2 阶段控制,则在吸嘴下降时,以 [下降速度]
中指定的低速,从基准的下降端开始下降行程量( [下降量] )。到达
比[下降量]高的位置,以[超弛[%]] 的 [H (吸取)] 或者 [H(贴片前)] 的速
度动作。
在吸嘴上升动作中使用 2 阶段控制,则在吸嘴上升时,以 [上升速度]
中指定的低速,从基准的下降端开始上升行程量( [上升量] )。到达
比[上升量]高的位置,以[超弛[%]] 的 [H (吸取)] 或者 [H(贴片后)] 的速
度动作。
为了稳定真空及空气压力,在指定了[仅下降] 或者 [下降/上升] 时,
吸取时需要将 [真空时间] 设定为 [下降后] ,在贴片时需要将 [吹气时
间
] 设定为 [下降后]。
下降速度(%)
(吸取时)/(贴片时)
将吸嘴下降时 2 阶段控制的低速动作的下降速度,输入在超弛值(%)
处。
在吸取时和贴片时,可以分别进行设定。
吸取时,应输入比[超弛 [%]] 的 [H (吸取)] 的超弛值更低的速度。
贴片时,应输入比[超弛 [%]] 的 [H(贴片前)] 的超弛值更低的速度。
上升速度(%)
(吸取时)/(贴片时)
将吸嘴上升时 2 阶段控制的低速动作的上升速度,输入在超弛值(%)
处。
在吸取时和贴片时,可以分别进行设定。
吸取时,应输入比[超弛 [%]] 的 [H (吸取)] 的超弛值更低的速度。
贴片时,应输入比[超弛 [%]] 的 [H(贴片后)] 的超弛值更低的速度。
下降量(mm)
(吸取时)/(贴片时)
输入吸嘴下降时,在 2 阶段控制的低速动作下所下降的行程量(mm)。
如果实际的行程量比输入值小,仅低速动作。
在吸取时和贴片时,可以分别进行设定。
上升量(mm)
(吸取时)/(贴片时)
输入吸嘴上升时,在 2 阶段控制的低速动作下所上升的行程量(mm)。
如果实际的行程量比输入值小,仅低速动作。
在吸取时和贴片时,可以分别进行设定。
超驰 供料器 从「高速 2」、「高速」、「中速」、「低速」4 阶段选择供料器元件
的送料速度。
供料器宽度为 12mm 以上时,不能设定「高速」。