SG_FSE_SiplaceHF_HF3_00193901-05_eng.pdf - 第106页
1 - 36 S tudent Guide SIPLACE HF/HF3 3 Communication and Control Edition 09/2005 36 The position is determined by a position counter on the axis controller . The moving direction of the axis is determined by the ph ase s…
1 - 35
Student Guide SIPLACE HF/HF3
Edition 09/2005 3 Communication and Control
35
3.4 Axis control
3.4.1 Position measuring system
3.4.1.1 Track signals and Zero pulse signal
Our Axes systems consists of the following parts.
– Axis controller board with VC 3 Controller
– Servo amplifier
– Motor
– Position measuring system with Incremental- scale and -encoder
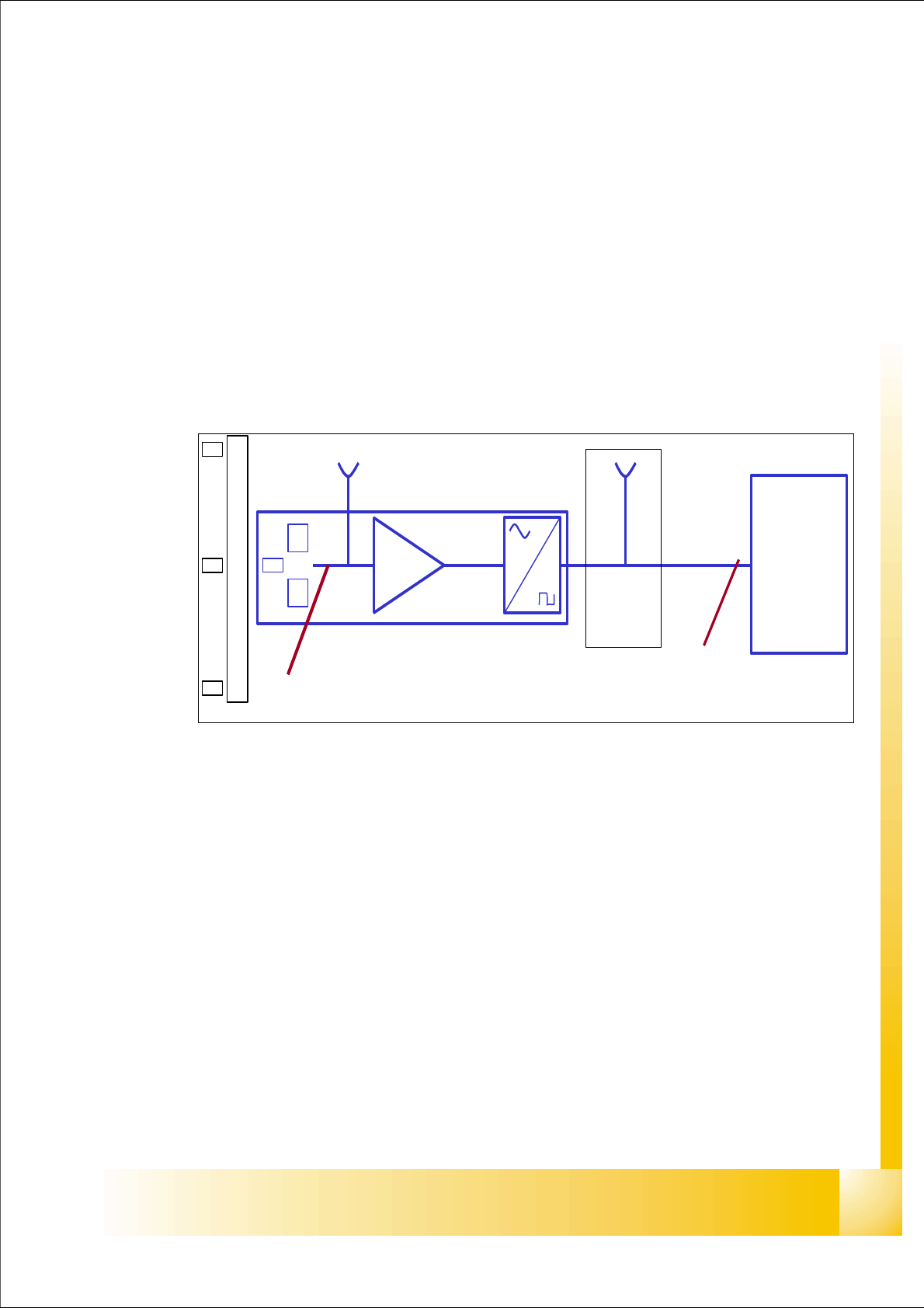
Fig. 3.4 - 1 Principle circuit for position measuring systems
Legend
The closed-loop control system of an axis is detecting the position directly at the moving element
of the axis. The position measuring system generates an analoge signal when the encoder moves
over the scale. By standard an amplifier, a multiplication circuit and digitalization is integrated in
the encoder case. A test connector is normally available at the next interface board, or the digital
signals are measurable at the Track A / B and Zero pulse output of the SIPLACE Axis Tester.
At the HF-machine the track signals are the only feedback from the Axis to the control unit. This
means any fault on the track signals may influence the Axis control; the Gantry axes immediately
stops at a fault; the head axes finish the positioning to target before showing a track signal error.
(1) Incremental scale with zero pulses (2) Incremental encoder for track A / B and Zeropulse
signals (O-pulse.)
(3) Analoge signal output and amplifier (4) Electronic signal multiplication and signal digita-
lization
(5) Test output digital signals (6) Axis controller
A
B
A /A
B /B
0 -impuls .
/0-im
p
uls .
0 -impuls
1
2
3
4
5
6
1 - 36
Student Guide SIPLACE HF/HF3
3 Communication and Control Edition 09/2005
36
The position is determined by a position counter on the axis controller. The moving direction of the
axis is determined by the phase shift of the Tracksignals (a leading Track A signal means moving
to the right; a leading Track B signal means moving to the left).
To make the encoder system robust for the high resolution we multiply the frequency of the ana-
loge signal and create a high resolution digital measuring system.
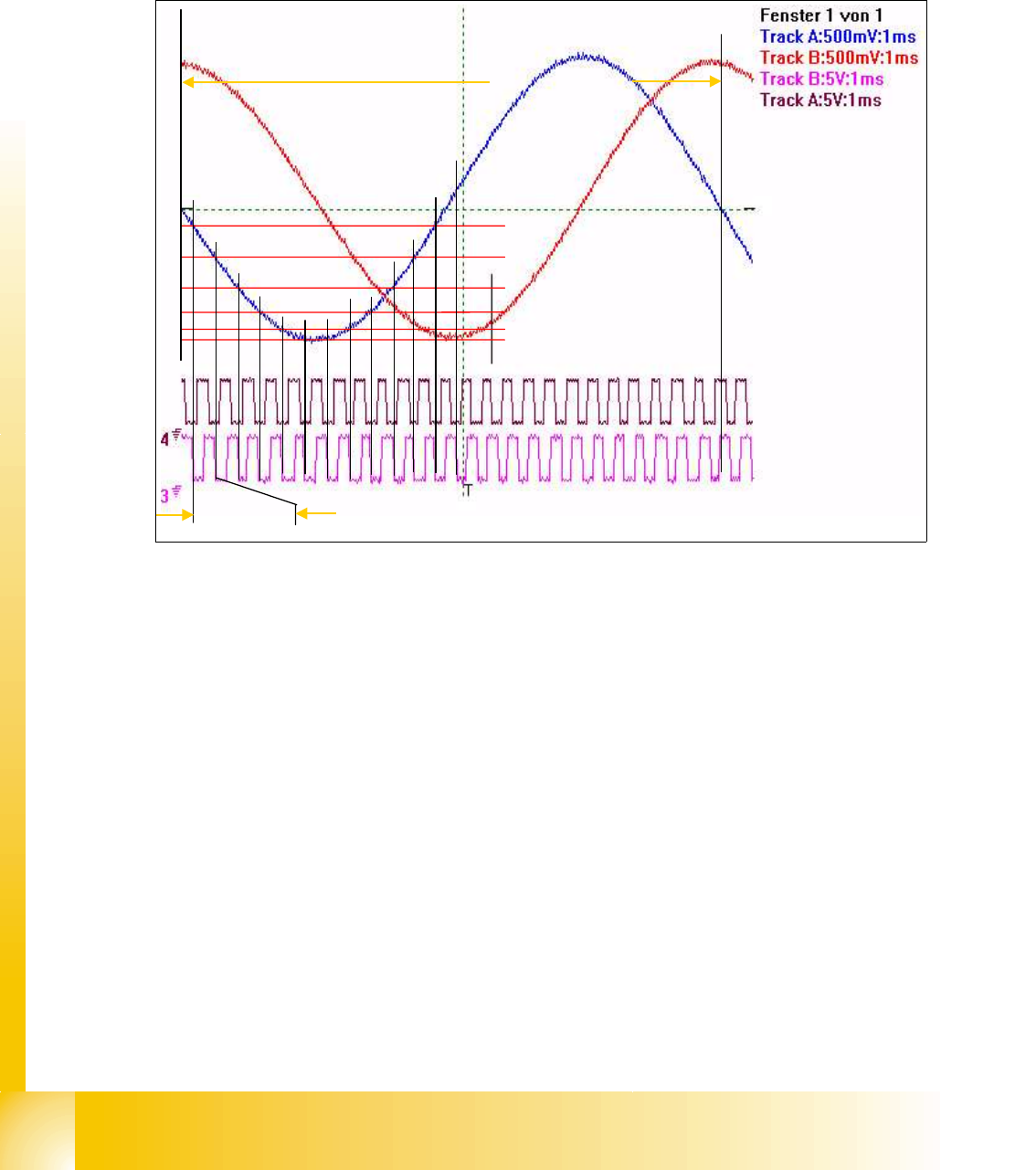
Fig. 3.4 - 2 Principle signal multiplication at analog Track signals of a gantry axis
Legend
In principle the track signal is multiplied by a ’Schmitt Trigger’ circuit. By comparing analoge and
digital signals on our axes you will find a multiplication by 25 (see Fig. 3.4 - 2), 10 or by 1.
The track signals of the C&P head axes can only be measured as digital signals i.e. the transfor-
mation of the analogue track signals into digital track signals occurs directly in the incremental en-
coder without any Test connector in that encoder case.
(1) Analoge track A signal Incremental
encoder
(2) Analoge track B signal Incremental
encoder
(3) Digital track A signal at Test connector (4) Digital track B signal at Test connector
(5) Period time of analoge track signal (6) Period time of digital track signal
1
2
5
6
1 - 37
Student Guide SIPLACE HF/HF3
Edition 09/2005 3 Communication and Control
37
3.4.1.2 Zero pulse at the position encoder
Each incremental encoder system needs initializing. This mean a reference run is executed for
each axis.
At the reference run the system searches for a certain position - the signal for this is the Zero
pulse. The Zero pulse is an analoge signal and a ’Schmitt Trigger’ circuit digitizes it.
(calibrate ’Zero line’ to the middle of the screen before this measurement).
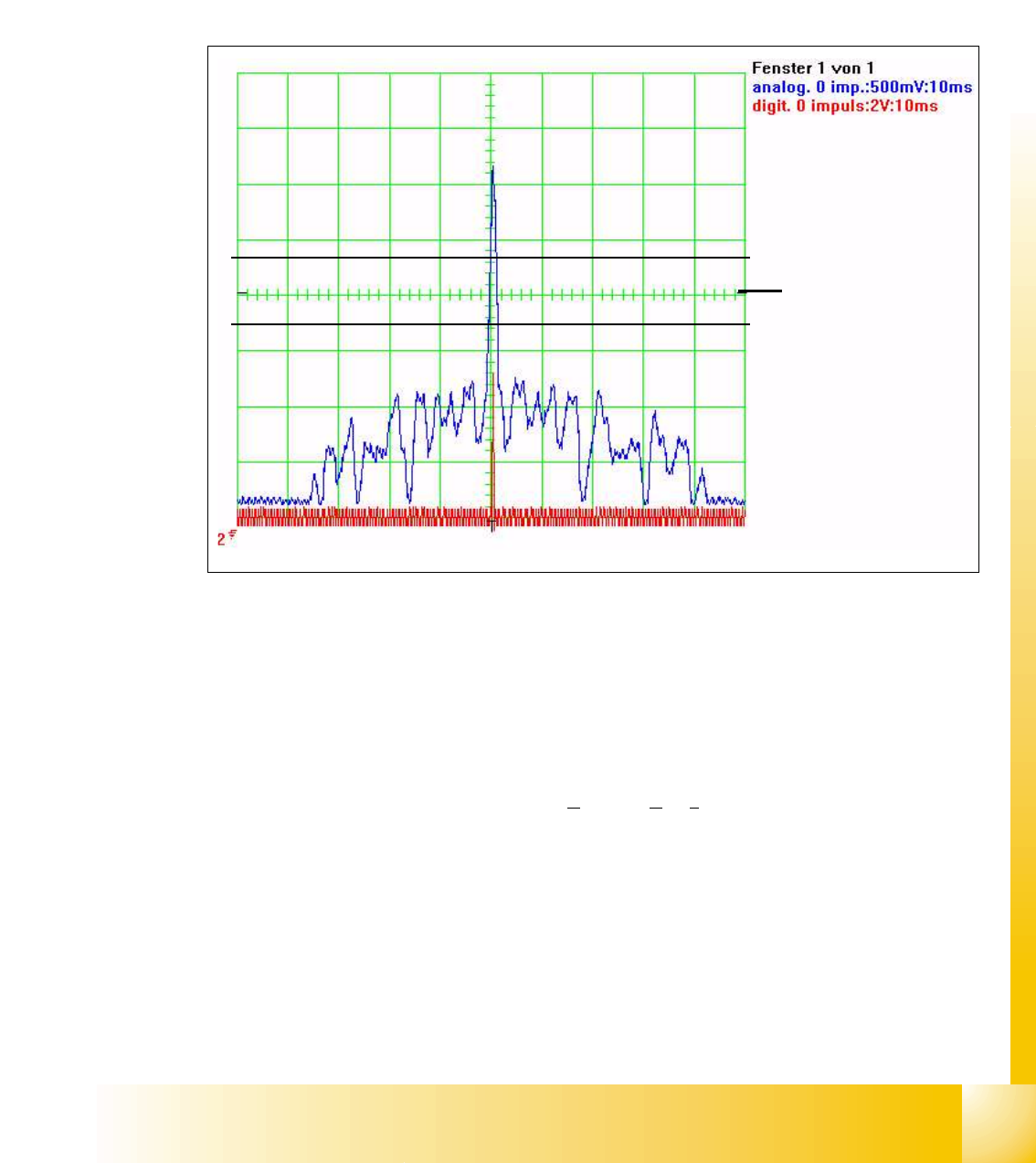
Fig. 3.4 - 3 Analoge and digital zero pulse signals (’zero line’ adjusted to middle)
At about 2.5 V threshold the ’Schmitt Trigger’ circuit creates a short high peak, the Zero pulse for
the position control system. If the encoder is mounted to close to the scale one of the noise glit-
ches could override the ’Schmitt Trigger’threshold. This means the Zero pulse is detected at a
wrong position of the Gantry axis, so it could lead to a board offset. (At S or HS machines this
could lead to a placement offset .) The digital Zero pulse is measured with a probe at Pin 8 of the
test connector.
The Zero pulse output of the Axistestbox (or S
IPLACE Axis Tester SAT ) is where the inverted
Zero pulse can be measured.
3
The analoge Zero pulse
has to be 0.3 V higher
than the Trigger threshold
for the digital pulse
Schmitt Trigger Threshold
Glitches (signal noise)
should not override the limit
0.3 V less than Trigger
threshold!