SG_FSE_SiplaceHF_HF3_00193901-05_eng.pdf - 第453页
1 - 25 S tudent Guide SIPLACE HF/HF3 Edition 09/2005 10 Sitest 25 10.2.7.2 PCB Camera Functions Wähl t das Portal 1 -2 aus. Die Wer te ax , bx , cx , ay , by und cy beschrei ben eine h omogene Trans form ati onsmat rix. …
1 - 24
Student Guide SIPLACE HF/HF3
10 Sitest Edition 09/2005
24
10.2.7 Single calibration steps (Flow charts e.g. SW 504 )
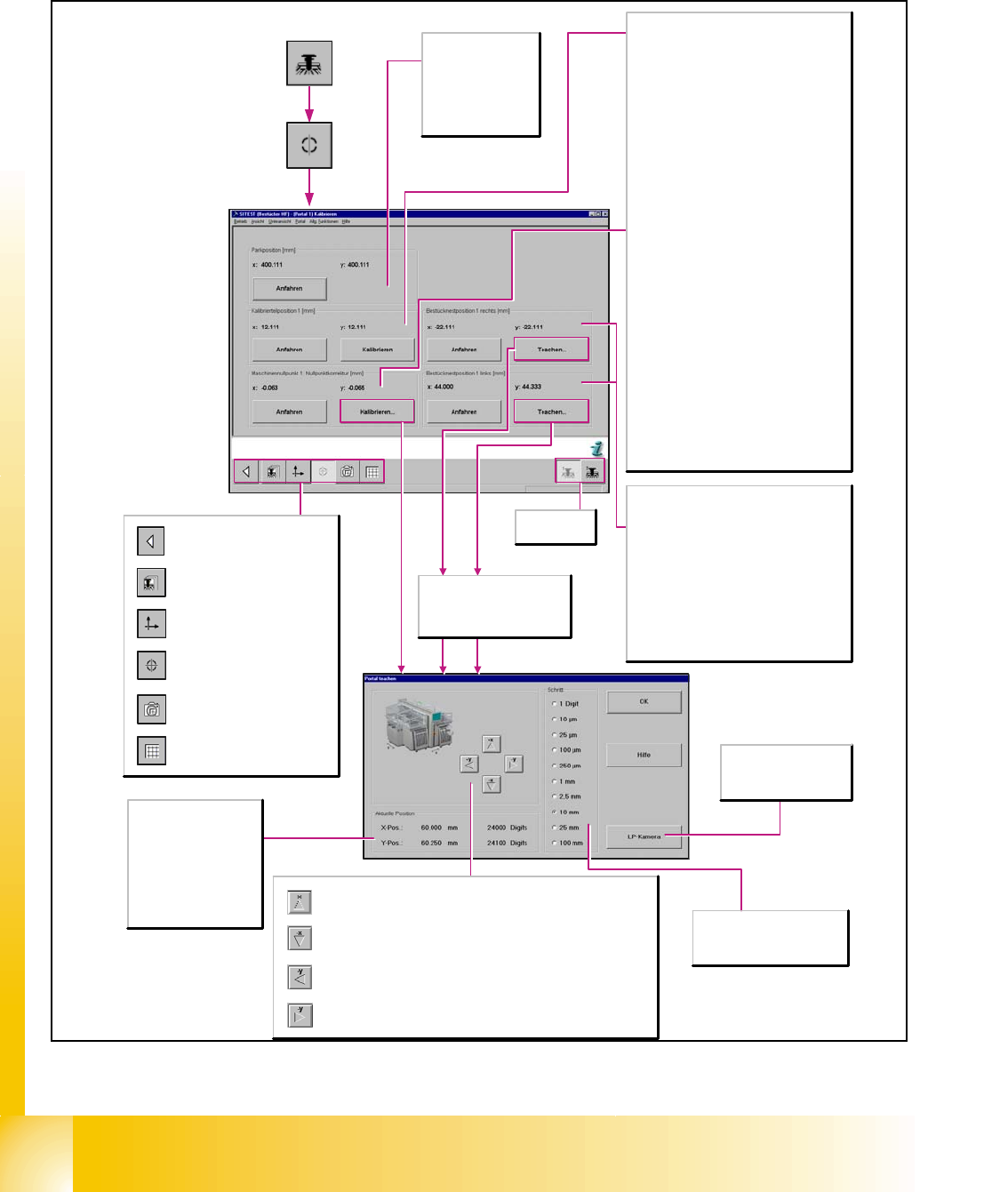
10.2.7.1 Gantry's Calibration Functions
Wählt das
Portal 1-2 aus.
Parkposition [mm]
x/y
Zeigt die x/y-Position
der Parkposition an.
Anfahren
Fährt das Portal in die
Parkposition.
Das Teachen der
Bestücknester kann nur
durchgeführt werden, wenn
der Transportmodus normale
Leiterplatte aktiviert ist.
Aktuelle Position
X-Pos.
Zeigt die beim Teachen
angefahrene x-Position
des jeweiligen Portals an.
Y-Pos.
Zeigt die beim Teachen
angefahrene y-Position
des jeweiligen Portals an.
Mit jedem Anklicken der Schaltfläche wird das aktive Portal um einen
Schritt der ausgewählten Schrittweite in die negative y-Richtung verfahren.
Mit jedem Anklicken der Schaltfläche wird das aktive Portal um einen
Schritt der ausgewählten Schrittweite in die positive y-Richtung verfahren.
Mit jedem Anklicken der Schaltfläche wird das aktive Portal um einen
Schritt der ausgewählten Schrittweite in die negative x-Richtung verfahren.
Mit jedem Anklicken der Schaltfläche wird das aktive Portal um einen
Schritt der ausgewählten Schrittweite in die positive x-Richtung verfahren.
Schritt
Auswahl der gewünschten
Schrittweite für das Verfahren
des Portals.
LP-Kamera
Schaltet die
Bildschirmanzeige auf die
Leiterplatten-Kamera um.
Kalibrierteilposition 1 (2) [mm]
x/y
Zeigt den bei der Kalibrierung ermittelten Wert
für die Position des Kalibrierteils in x-/y-Richtung
an. Der vorherige Wert wird in Klammern
angezeigt.
Anfahren
Fährt das aktive Portal mit der LP-Kamera über
die Kalibrierteilposition und schaltet zur
Überprüfung die Bildschirmanzeige auf die LP-
Kamera um. Das Kalibrierteil muss im Suchfeld
der Kamera zu sehen sein.
Kalibrieren
Ermittelt die Position des
Kalibrierteilmittelpunktes.
Maschinennullpunkt: Nullpunktkorrektur
[mm]
x/y
Zeigt den bei der Kalibrierung ermittelten Wert
für die Nullpunktkorrektur in x-/y-Richtung an.
Der vorherige Wert wird in Klammern angezeigt.
Anfahren
Fährt das Portal mit der LP-Kamera über die
Messbohrung für den Maschinennullpunkt und
schaltet zur Überprüfung die Bildschirmanzeige
auf die LP-Kamera um. Der Maschinennullpunkt
muss im Suchfeld der Kamera zu sehen sein.
Kalibrieren...
Öffnet das Dialogfenster Teachen, um die
Position des Maschinennullpunktes anzufahren.
Danach wird beim Kalibriervorgang der Wert für
die Nullpunktkorrektur der X- und Y-Achse
ermittelt.
Bestücknestposition 1 (2) rechts [mm]
Bestücknestposition 1 (2) links [mm]
(Doppeltransport)
x/y
Zeigt die beim Teachen ermittelte Position des
Bestücknestes in x-/y-Richtung an. Die
vorherige Position wird in Klammern angezeigt.
Anfahren
Fährt das aktive Portal mit der LP-Kamera über
die Bestücknestposition und schaltet zur
Überprüfung die Bildschirmanzeige auf die LP-
Kamera um. Die Bestücknestposition muss im
Suchfeld der Kamera zu sehen sein.
Aufruf der Ansicht für die
Leiterplatten-Mappingfunktionen
des Portals.
Aufruf der Ansicht für die
Leiterplatten-Kamerafunktionen
des Portals
Aufruf der Ansicht für die
Kalibrierfunktionen des Portals.
Aufruf der Ansicht für die
Achsfunktionen des Portals.
Aufruf der Ansicht für die
Funktionen des Portals.
Schaltet zur Grundansicht
zurück.
1 - 25
Student Guide SIPLACE HF/HF3
Edition 09/2005 10 Sitest
25
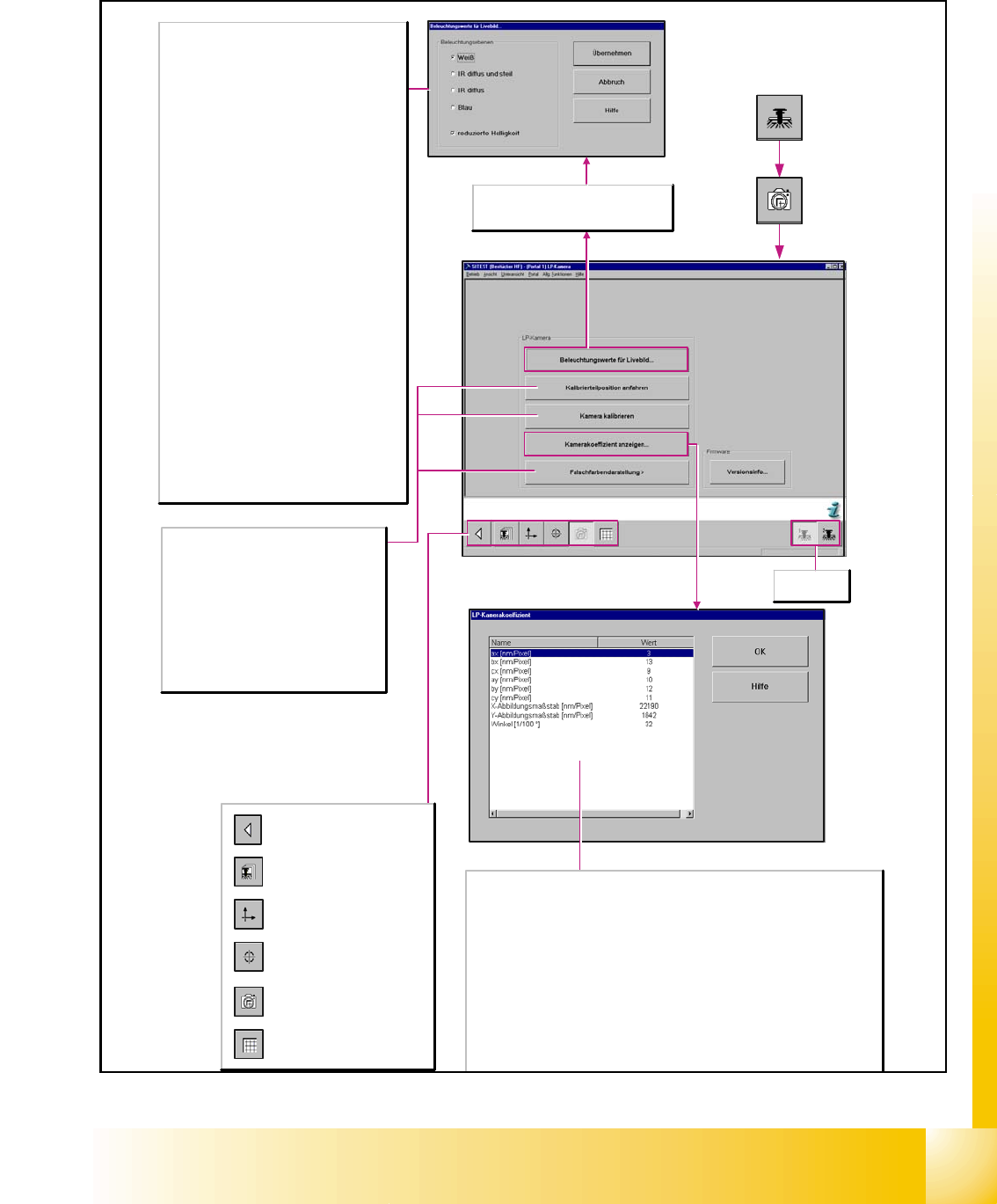
10.2.7.2 PCB Camera Functions
Wählt das
Portal 1-2 aus.
Die Werte ax, bx, cx, ay, by und cy beschreiben eine homogene Transformationsmatrix.
Mit dieser Matrix lassen sich Koordinaten des Maschinenkoordinatensystems [Digit] in
Kamerakoordinaten [Pixel] transformieren.
X-Abbildungsmaßstab [nm/Pixel]
Gibt die Auflösung der Kamera in x-Richtung an. Ein Wert von z.B. 10000 nm/pixel
bedeutet, dass jedes Pixel des Kamerabildes einen Bereich des Objektes abbildet, der sich
in x-Richtung über 10000 nm erstreckt.
Y-Abbildungsmaßstab [nm/Pixel]
Gibt die Auflösung der Kamera in x-Richtung an. Ein Wert von z.B. 10000 nm/pixel
bedeutet, dass jedes Pixel des Kamerabildes einen Bereich des Objektes abbildet, der sich
in y-Richtung über 10000 nm erstreckt.
Winkel [1/100*]
Gibt die Verdrehung des Kamerakoordinatensystems zum Maschinenkoordinatensystem an.
Hier können die Optionen für den Beleuchtungstest
mit der Multicolor-Kamera ausgewählt werden.
Beleuchtungsebenen
Weiß
Diese Beleuchtungsebene ist für Standard-
Leiterplatten mit verzinnten Passmarken geeignet.
IR diffus und steil
Diese Beleuchtungsebene ist meist sinnvoll für
Marken, die mit Lötstopplack abgedeckt sind oder
für Marken auf Flex-Material. Auch bei Silber-
Platinmarken auf Keramik kann evtl. eine
Verbesserung der Erkennung erzielt werden, was
vorab durch eine Probezentrierung/-bestückung
festgestellt werden sollte.
IR diffus
Diese Beleuchtungsebene ist meist sinnvoll für
Marken, die mit Lötstopplack abgedeckt sind oder
für Marken auf Flex-Material. Auch bei Silber-
Platinmarken auf Keramik kann evtl. eine
Verbesserung der Erkennung erzielt werden, was
vorab durch eine Probezentrierung/-bestückung
festgestellt werden sollte.
Blau
Damit kann bei blanken Passmarken auf hellem
Basismaterial, wie Keramik oder CEM, in den
meisten Fällen eine deutliche Verbesserung des
Kontrastes erreicht werden. In einigen Fällen
können auch durch Lötstopplack überdeckte
Passmarken auf hellem Untergrund besser erkannt
werden.
Reduzierte Helligkeit
Aktivieren Sie diese Funktion um einen
Beleuchtungstest bei reduzierter
Beleuchtungsstärke durchzuführen.
Diese Schaltfläche ist nur anwählbar,
wenn in der Maschinenkonfiguration die
Multicolor-Kamera konfiguriert wurde.
Kalibrierteilposition anfahren
Fährt das aktive Portal mit der LP-Kamera über
die Kalibrierteilposition und schaltet die
Bildschirmanzeige auf die LP-Kamera um.
Kamera kalibrieren
Ermittelt den Abbildungsmaßstab (nm/Pixel)
und den Kamerawinkel.
Falschfarbendarstellung >
Schaltet die Bildschirmanzeige auf die LP-
Kamera um, um das Resultat eventueller
Beleuchtungsänderungen zu sehen.
Aufruf der Ansicht für die
Leiterplatten-Mappingfunktionen
des Portals.
Aufruf der Ansicht für die
Leiterplatten-Kamerafunktionen
des Portals
Aufruf der Ansicht für die
Kalibrierfunktionen des Portals.
Aufruf der Ansicht für die
Achsfunktionen des Portals.
Aufruf der Ansicht für die
Funktionen des Portals.
Schaltet zur Grundansicht
zurück.
1 - 26
Student Guide SIPLACE HF/HF3
10 Sitest Edition 09/2005
26
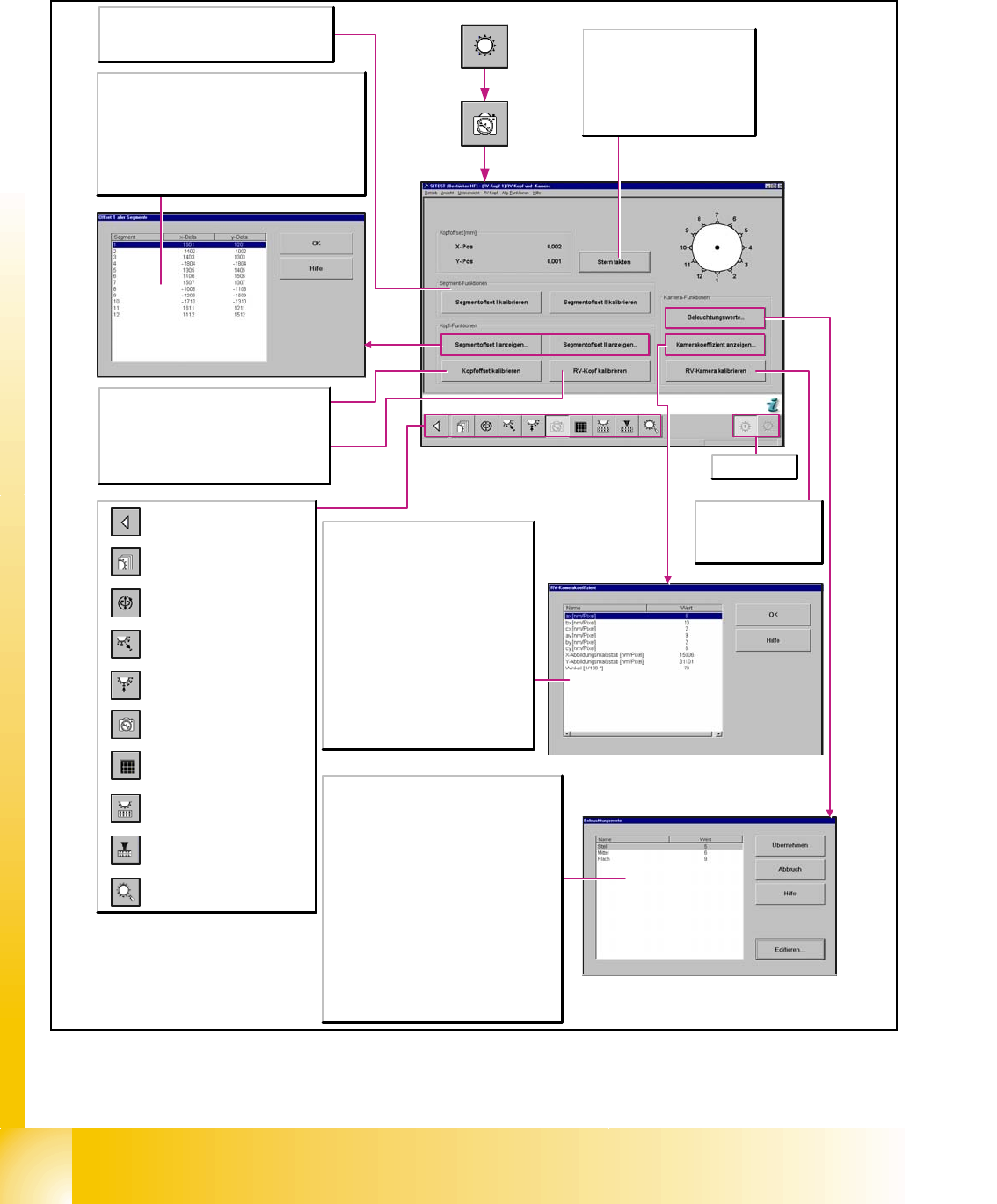
10.2.7.3 Calibration functions C&P head
Aufruf der Ansicht für die
Funktionen des Revolverkopfes.
Aufruf der Ansicht für die
Achsfunktionen des
Revolverkopfes.
Aufruf der Ansicht für die
Funktionen des Revolverkopfes
im Halte- und Abwurfkreis.
Aufruf der Ansicht für die
Funktionen des Revolverkopfes
im Bestück- und Abholkreis.
Aufruf der Ansicht für die
Mappingfunktionen des
Revolverkopfes.
Aufruf der Ansicht für die RV-
Kamerafunktionen.
Aufruf der Ansicht für die Kopf-
Funktionen des Revolverkopf -
Pipettenwechslers.
Aufruf der Ansicht für die
Magazin-Funktionen des
Revolverkopf-Pipettenwechslers.
Aufruf der Ansicht für die
Funktionen des Revolverkopf-
Bauelemente-Sensors.
Schaltet zur Grundansicht
zurück.
Wählt den RV-
Kopf 1-2 aus.
Stern takten
Taktet bei jedem Anklicken der
Schaltfläche den Stern jeweils um
ein Segment weiter. Die jeweiligen
Positionen der einzelnen
Segmente werden in der
grafischen Darstellung des Sterns
angezeigt.
Segment-Funktionen
Segmentoffset I/II kalibrieren
Ermittelt den Abstand vom Mittelpunkt der RV-
Kamera zur Drehachse des aktuellen Segments.
Segment
Zeigt die Nummer des jeweiligen Segments an.
x-Delta
Zeigt den Offsetwert (Abstand vom Mittelpunkt der RV-
Kamera zur Drehachse des Segments) in x-Richtung an.
y-Delta
Zeigt den Offsetwert (Abstand vom Mittelpunkt der RV-
Kamera zur Drehachse des Segments) in y-Richtung an.
Kopfoffset kalibrieren
Ermittelt den Kopfoffset (Abstand LP-Kamera
zur RV-Kamera).
RV-Kopf kalibrieren
Ermittelt die Kamerakoeffizienten, den
Kamerawinkel und die Segmentoffsets I und II.
Die Werte ax, bx, cx, ay, by und cy
beschreiben eine homogene
Transformationsmatrix.
Mit dieser Matrix lassen sich Koordinaten
des Maschinenkoordinatensystems [Digit] in
Kamerakoordinaten [Pixel] transformieren.
X/Y-Abbildungsmaßstab [nm/Pixel]
Gibt die Auflösung der Kamera in x-/y-
Richtung an.
Ein Wert von z.B. 10000 nm/pixel bedeutet,
dass jedes Pixel des Kamerabildes einen
Bereich des Objektes abbildet, der sich in x-/
y-Richtung über 10000 nm erstreckt.
Winkel [1/100*]
Gibt die Verdrehung des
Kamerakoordinatensystems zum
Maschinenkoordinatensystem an.
Steil
Die Einstellung des Wertes für die steile
Beleuchtungsebene ist für die Beleuchtung von
spiegelnden Beinchen, Keramikbauteilen und
hellen Bauelementekörpern geeignet.
Mittel
Die Einstellung des Wertes für die mittlere
Beleuchtungsebene ist für die Beleuchtung eines
breiten Bauelementspektrums geeignet. Jedoch
sollte der Wert bei Keramikbauteilen, hellen
Bauelementekörpern, µBGAs und Flip-Chips nur
mit niedriger Intensität eingestellt werden.
Flach
Die Einstellung des Wertes für die flache
Beleuchtungsebene ist für die Beleuchtung von
BGAs, µBGAs, Flip-Chips, Melfs und
Bauelementen mit konvexen Anschlüssen
geeignet.
RV-Kamera kalibrieren
Ermittelt die
Kamerakoeffizienten
und den Kamerawinkel.