SG_FSE_SiplaceHF_HF3_00193901-05_eng.pdf - 第458页
1 - 30 S tudent Guide SIPLACE HF/HF3 10 Sitest Edition 09/2005 30 10.2.7.6 Calibration function IC camera T win head W ählt den Twin Head 1-2 aus. Aufru f der Ans icht fü r die Funktionen des Twin Head. Aufru f der Ans i…
1 - 29
Student Guide SIPLACE HF/HF3
Edition 09/2005 10 Sitest
29
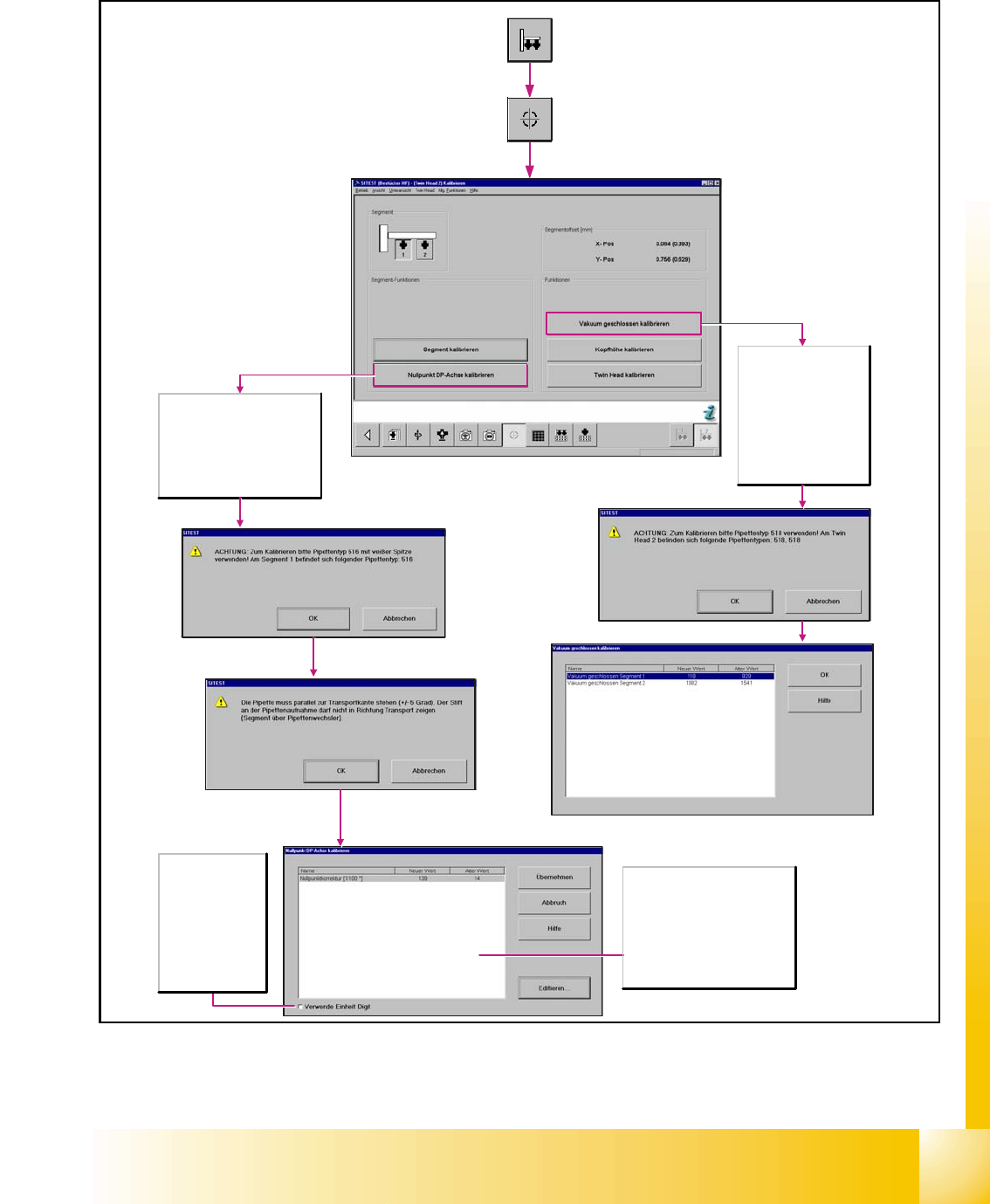
Vakuum geschlossen
kalibrieren
Es wird für beide
Segmente der Wert für
"Vakuum geschlossen"
gemessen und
gespeichert. Die neuen
und die alten
Vakuumwerte werden in
einem Dialogfenster
angezeigt.
Nullpunkt DP-Achse kalibrieren
Der Nullpunkt der DP-Achse wird
kalibriert. Anschließend wird das
Dialogfenster Nullpunkt DP-Achse
kalibrieren geöffnet. Hier wird der
neue und der alte Wert für die
Nullpunktkorrektur angezeigt und
kann bei Bedarf editiert werden.
Verwende Einheit
Digit
aktiviert:
Die Einheiten werden
in Digits angezeigt.
deaktiviert:
Die Einheiten werden
in µm bzw. 1/100°
angezeigt
(Standardeinstellung).
Hinweis
Den Wert für die Nullpunktkorrektur
entnehmen Sie bitte der gültigen
Einstellanweisung.
Nullpunktkorrektur
Hier wird der bei der Kalibrierung
aktuell ermittelte Wert und der
vorherige Wert für die
Nullpunktkorrektur angezeigt.
1 - 30
Student Guide SIPLACE HF/HF3
10 Sitest Edition 09/2005
30
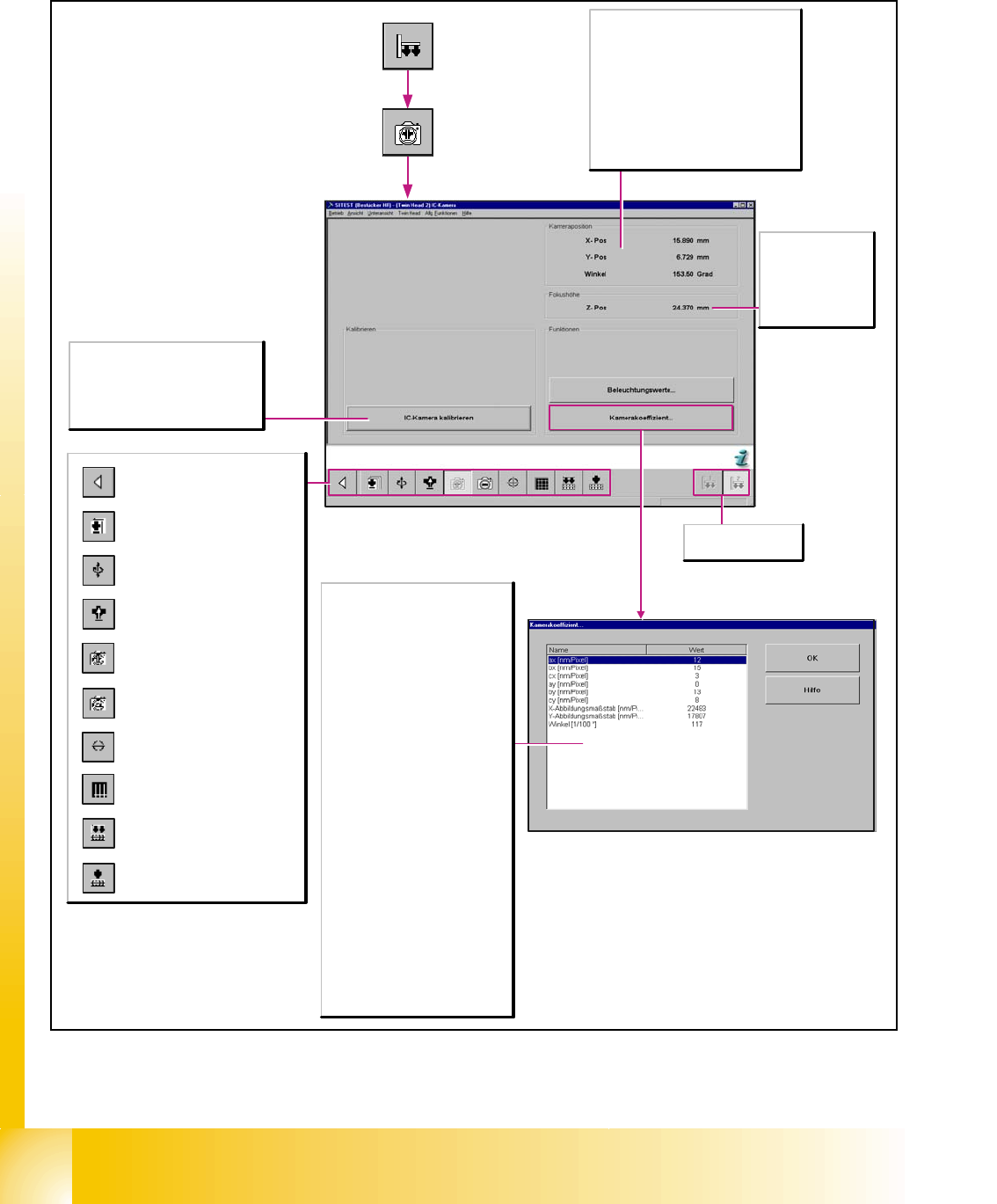
10.2.7.6 Calibration function IC camera Twin head
Wählt den
Twin Head 1-2 aus.
Aufruf der Ansicht für die
Funktionen des Twin Head.
Aufruf der Ansicht für die
Achsfunktionen des Twin Head.
Aufruf der Ansicht für die
Funktionen der Kopfplatine des
Twin Head.
Aufruf der Ansicht für die
Funktionen der IC-Kamera.
Aufruf der Ansicht für die
Funktionen der FC-Kamera.
Aufruf der Ansicht für die
Kalibrierfunktionen des Twin
Head.
Aufruf der Ansicht für die
Mappingfunktionen des Twin
Head.
Aufruf der Ansicht für die Kopf-
Funktionen des Twin Head -
Pipettenwechslers.
Aufruf der Ansicht für die
Magazin-Funktionen des Twin
Head-Pipettenwechslers.
Schaltet zur Grundansicht
zurück.
Kalibrieren
IC-Kamera kalibrieren
Für das aktive Segment werden die
Kalibrierfaktoren der IC-Kamera,
die Fokus-Höhe und die Position
der Kamera ermittelt.
Kameraposition
X-Pos
Zeigt die bei der Kalibrierung ermittelte
Position der Kamera in x-Richtung an.
Y-Pos
Zeigt die bei der Kalibrierung ermittelte
Position der Kamera in y-Richtung an.
Winkel
Zeigt den bei der Kalibrierung
ermittelten Drehwinkel der Kamera an.
Focushöhe
Z-Pos
Zeigt die bei der
Kalibrierung
ermittelte
Fokushöhe der
Kamera an.
Die Werte ax, bx, cx, ay, by und cy
beschreiben eine homogene
Transformationsmatrix.
Mit dieser Matrix lassen sich
Koordinaten des
Maschinenkoordinatensystems
[Digit] in Kamerakoordinaten [Pixel]
transformieren.
X-Abbildungsmaßstab [nm/Pixel]
Gibt die Auflösung der Kamera in
x-Richtung an.
Ein Wert von z.B. 10000 nm/pixel
bedeutet, dass jedes Pixel des
Kamerabildes einen Bereich des
Objektes abbildet, der sich in
x-Richtung über 10000 nm
erstreckt.
Y-Abbildungsmaßstab [nm/Pixel]
Gibt die Auflösung der Kamera in
y-Richtung an.
Ein Wert von z.B. 10000 nm/pixel
bedeutet, dass jedes Pixel des
Kamerabildes einen Bereich des
Objektes abbildet, der sich in
y-Richtung über 10000 nm
erstreckt.
Winkel [1/100°]
Gibt die Verdrehung des
Kamerakoordinatensystems zum
Maschinenkoordinatensystem an.
1 - 31
Student Guide SIPLACE HF/HF3
Edition 09/2005 10 Sitest
31
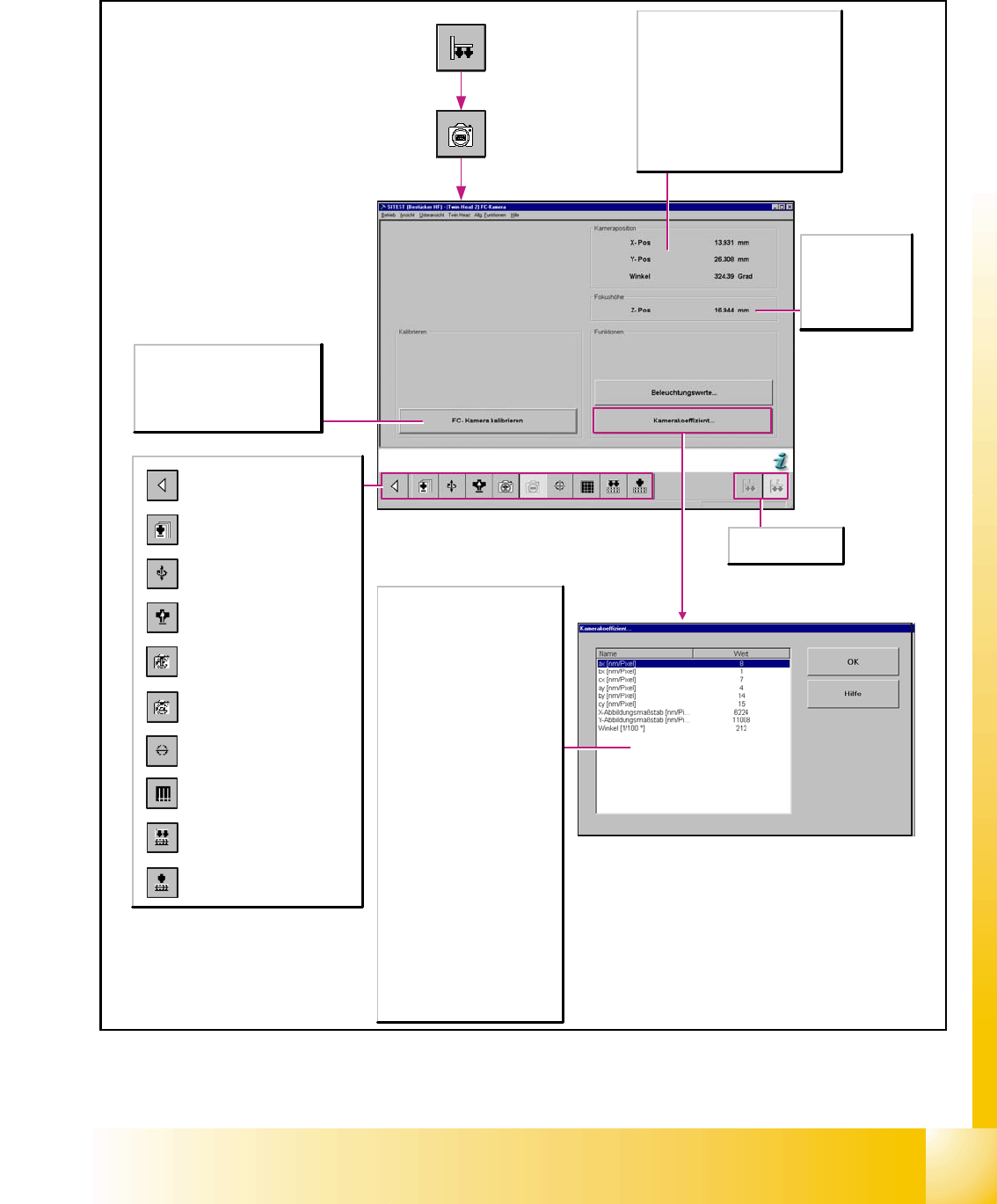
10.2.7.7 Calibration function FC camera Twin head
Wählt den
Twin Head 1-2 aus.
Aufruf der Ansicht für die
Funktionen des Twin Head.
Aufruf der Ansicht für die
Achsfunktionen des Twin Head.
Aufruf der Ansicht für die
Funktionen der Kopfplatine des
Twin Head.
Aufruf der Ansicht für die
Funktionen der IC-Kamera.
Aufruf der Ansicht für die
Funktionen der FC-Kamera.
Aufruf der Ansicht für die
Kalibrierfunktionen des Twin
Head.
Aufruf der Ansicht für die
Mappingfunktionen des Twin
Head.
Aufruf der Ansicht für die Kopf-
Funktionen des Twin Head -
Pipettenwechslers.
Aufruf der Ansicht für die
Magazin-Funktionen des Twin
Head-Pipettenwechslers.
Schaltet zur Grundansicht
zurück.
Kameraposition
X-Pos
Zeigt die bei der Kalibrierung ermittelte
Position der Kamera in x-Richtung an.
Y-Pos
Zeigt die bei der Kalibrierung ermittelte
Position der Kamera in y-Richtung an.
Winkel
Zeigt den bei der Kalibrierung
ermittelten Drehwinkel der Kamera an.
Focushöhe
Z-Pos
Zeigt die bei der
Kalibrierung
ermittelte
Fokushöhe der
Kamera an.
Die Werte ax, bx, cx, ay, by und cy
beschreiben eine homogene
Transformationsmatrix.
Mit dieser Matrix lassen sich
Koordinaten des
Maschinenkoordinatensystems
[Digit] in Kamerakoordinaten [Pixel]
transformieren.
X-Abbildungsmaßstab [nm/Pixel]
Gibt die Auflösung der Kamera in
x-Richtung an.
Ein Wert von z.B. 10000 nm/pixel
bedeutet, dass jedes Pixel des
Kamerabildes einen Bereich des
Objektes abbildet, der sich in
x-Richtung über 10000 nm
erstreckt.
Y-Abbildungsmaßstab [nm/Pixel]
Gibt die Auflösung der Kamera in
y-Richtung an.
Ein Wert von z.B. 10000 nm/pixel
bedeutet, dass jedes Pixel des
Kamerabildes einen Bereich des
Objektes abbildet, der sich in
y-Richtung über 10000 nm
erstreckt.
Winkel [1/100°]
Gibt die Verdrehung des
Kamerakoordinatensystems zum
Maschinenkoordinatensystem an.
Kalibrieren
FC-Kamera kalibrieren
Ermittelt für das aktive Segment die
Kalibrierfaktoren der FC-Kamera,
die Fokus-Höhe und die Position
der Kamera.