SG_FSE_SiplaceHF_HF3_00193901-05_eng.pdf - 第288页
1 - 88 S tudent Guide SIPLACE HF/HF3 6 Collect &Place-He ad / DLM2 Edition 09/2005 88 6.6.4 Axis control Z-Axis The Z-axis is driven with a DC servo motor . The co ntrol of the axis occurred with one control si- gnal…
1 - 87
Student Guide SIPLACE HF/HF3
Edition 09/2005 6 Collect &Place-Head / DLM2
87
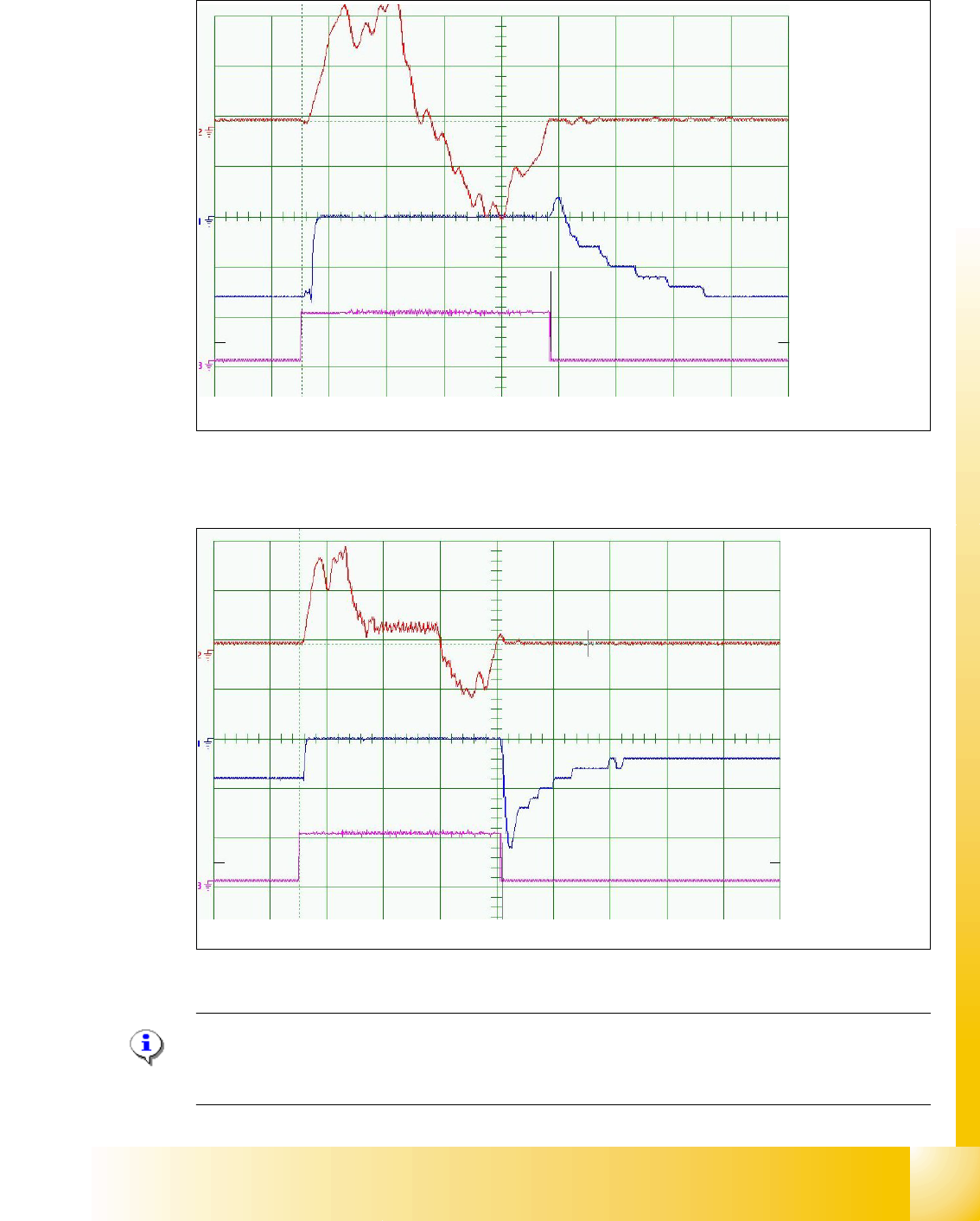
12 segment C&P head DLM2 - signal for Star axis
6
Fig. 6.6 - 8 Dynamic signals Star-Axis 12segment C&P head DLM2
6 segment C&P head DLM2 - signal for Star axis 6
6
Fig. 6.6 - 9 Dynamic signals Star axis 6 segment C&P head DLM2
Please Note:
If the positioning time to slow, please check the friction of the distributor disk and the magnetic
neutral position of the star motor. 6
Current nominal
Deviation of pos.
End signal
10ms/Div
2V/Div
500mV/Div
Positioning time: 46ms +/- 3 ms 1 Star step= 30000 Digits = 30°degree
Positioning time: 70ms +/- 3 ms 1 Star step= 60000 Digits = 60°degree
Current nominal
Deviation of pos.
End signal
10ms/Div
2V/Div
500mV/Div
1 - 88
Student Guide SIPLACE HF/HF3
6 Collect &Place-Head / DLM2 Edition 09/2005
88
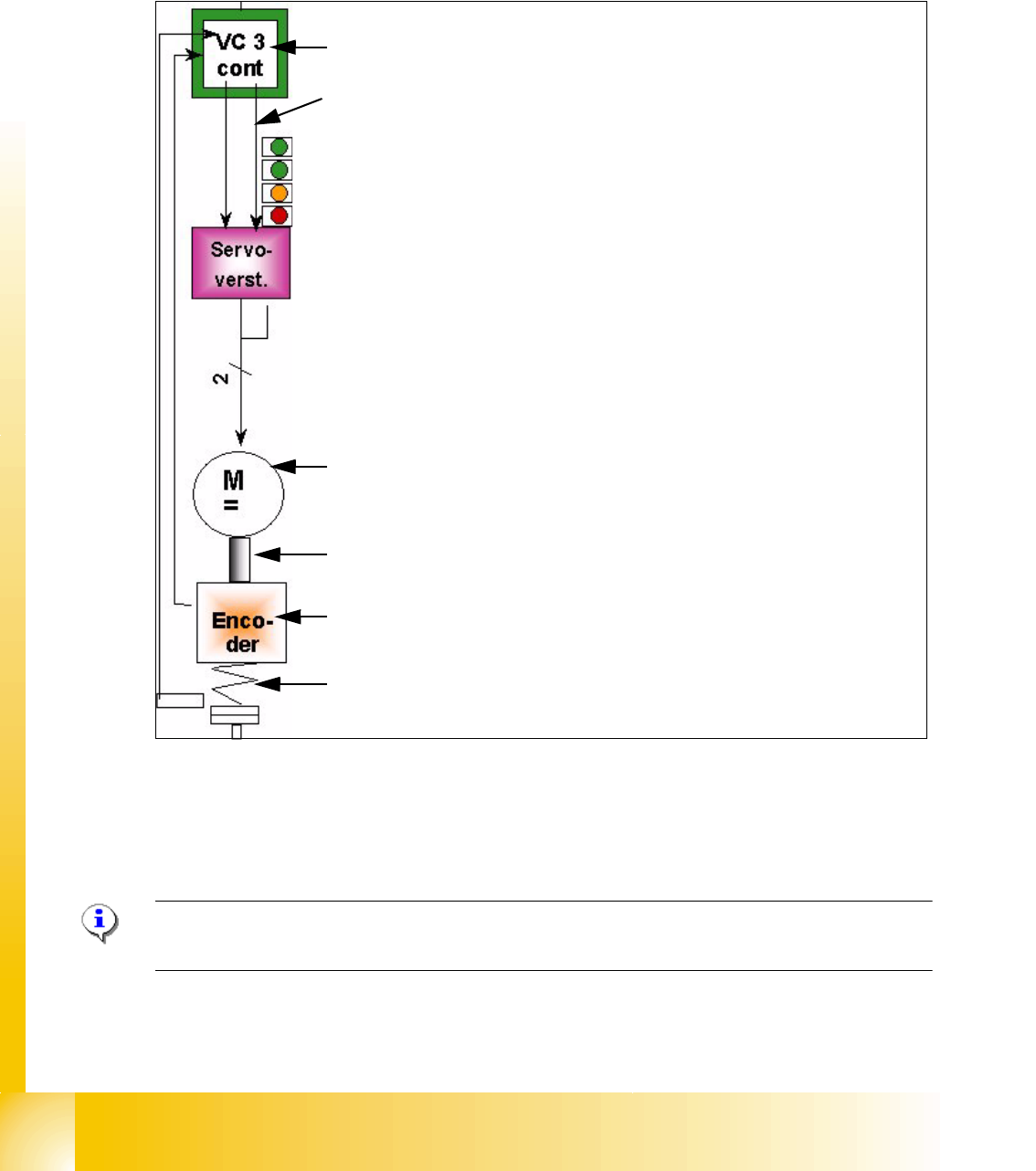
6.6.4 Axis control Z-Axis
The Z-axis is driven with a DC servo motor. The control of the axis occurred with one control si-
gnals of the VC3 controller I
nom "W" and I nom "U" = 0. The intermediate circuit voltages is
approx. 60V.
Fig. 6.6 - 10 Axis control Z-Axis
6.6.4.1 Check the dynamic Z-Axis
6.6.4.2 Test setup
Please Note:
The test setup for the Z-Axis is the same as the Star-Axis
The positioning time for the Z-Axis is 30ms +/-3ms (6 segment C&P head) and 24ms, -1 ms of the
12 segment C&P head.
Axis controller ’A363’ with VC 3 Controller (VC = Velocity Commutation)
Control signal I
nom "W"
LED‘s on the Servo amplifier:
– Power supply ON
– Servo enable, if the the enable signal from the axis board available.
– Display R.M.S. current limiter shorter than 2,5 s.
– Error: Overvoltage, -current, -temperature or Nominal current-over-
stepping longer than 2,5 sec.
Servo board control directly the DC motor.
DC motor.
Between the motor and the incremental encoder exist a fixed mechanical
combination.
Incremental encoder: transmit the exact position of the axis via the track
signals.
Elastic mech. Combination (Belt) and light barrier below, for the fast
recognition of the lower position.
1 - 89
Student Guide SIPLACE HF/HF3
Edition 09/2005 6 Collect &Place-Head / DLM2
89
– Move the gantry in the Service position, so that the Z-axis move in a free space.
SITEST: 6
➠ "Select "C&P heads" ==> "Select head" ==>"Axis functions" ==> "Select
Z-axis" ==> "Continuous run Z-axis" ==> "Select DIGIT for display" ==>"Edit: Target position
685 digits and Position mode = absolut" ==> "Sart".
➠ If necessary, press the START button.
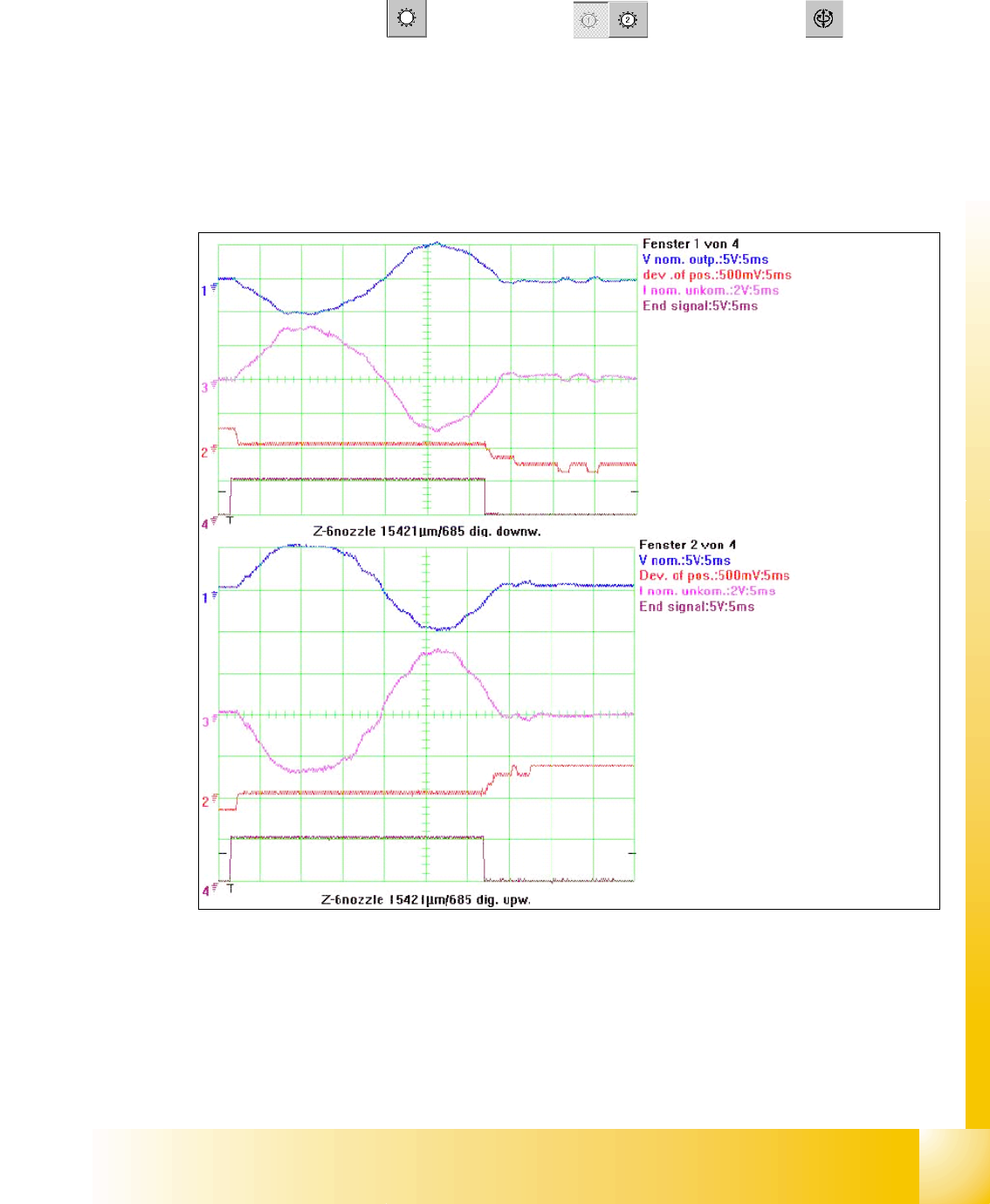
6.6.4.3 Example for dynamic with the control signal of the Vnom. output
Fig. 6.6 - 11 Dynamic signals Z-Axis for excample 6 segment C&P head
Legend
(1) Control signal (Axis testbox V nom.) (2) Uncommutated Current signal Axis adap-
ter
(3) Position of deviation (4) End signal
1
2
3
4
1
2
3
4