SG_FSE_SiplaceHF_HF3_00193901-05_eng.pdf - 第181页
1 - 15 S tudent Guide SIPLACE HF/HF3 Edition 09/2005 5 Gantry 15 5.3.5 Mechanical adjustment the increment al encoder The increment al encoder on the X- and Y -Axis must be adjust of a dist ance of 0,4 mm +/- 0,1 mm to t…
1 - 14
Student Guide SIPLACE HF/HF3
5 Gantry Edition 09/2005
14
5.3.4 Anti crash board
The anti crash board is in the respective Axis unit installed and make an immediate stop of the
main axes in the case of exceed the travel range with over-high velocity.
Adjustments on the anti crash board are not necessary on the HF machine!
With the HF3 machine the anti crash board with the distance sensor is activated between
Gantry 1 and 4 .( see Adjustment manual chapter 6.5)
Fig. 5.3 - 4 Anti crash board HF
Description anti crash board HF 3 5
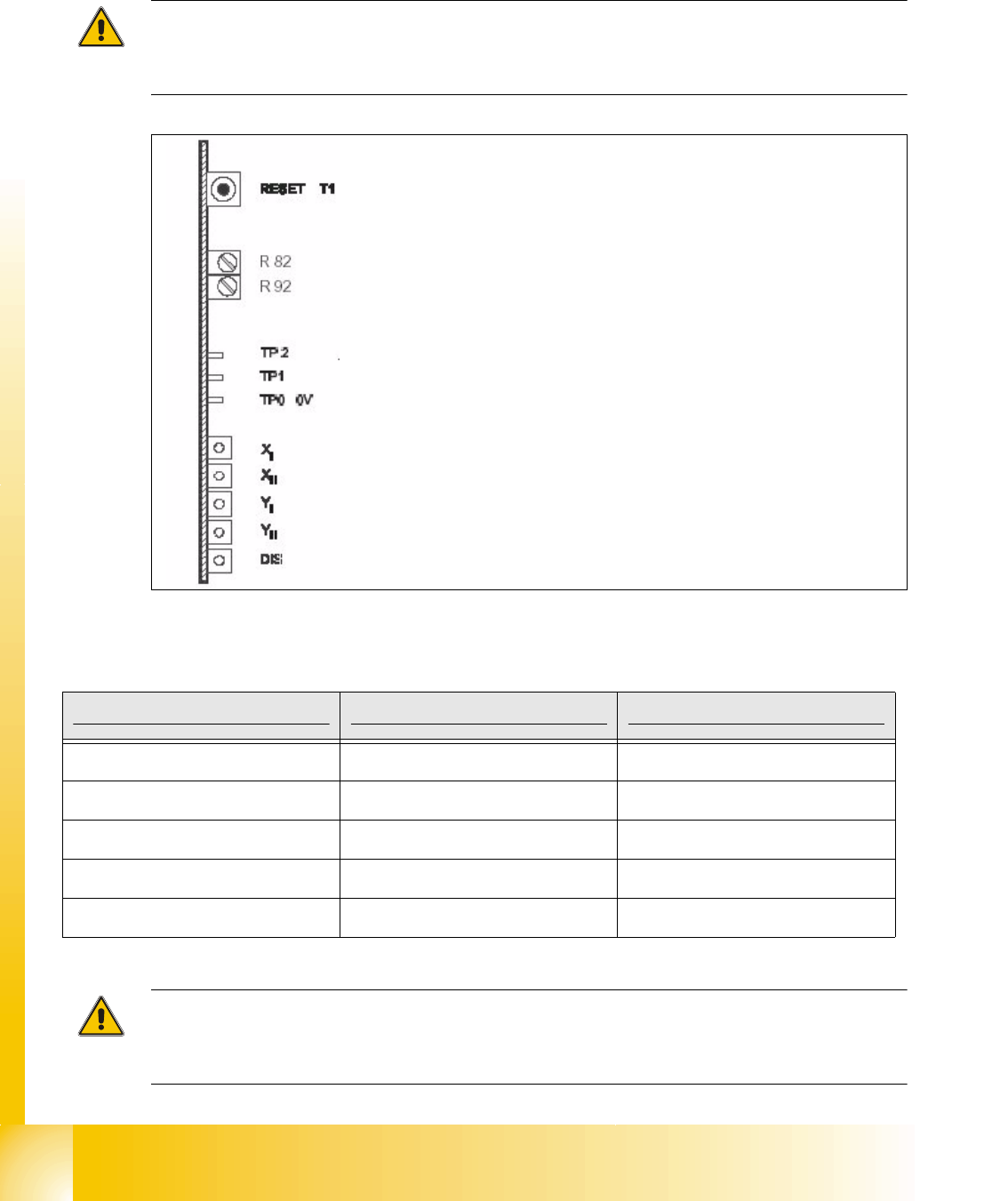
Attention: Appears the anti crash board an error message(LED then OFF), please press the
emergency stop button on the machine at first and then the reset button at the anti crash board
for reset the error.
T 1-> Reset button
R82, R92 = Potentiometer
TP2 -> Speed-Signal
TP1 -> distance sensor Signal
LED X
I -> 1st X-axis "speed error"
LED X
II -> 2nd X-axis "speed error"
LED Y
I -> 1st Y-axis "speed error"
LED Y
II -> 2nd Y-axis "speed error"
LED DIS = Message: Distance sensor activated.
(not used on the HF-machine)
Description Anticrash board in Axis unit PA 1 Anticrash board in Axis unit PA 2
LED XI X-axis Gantry 1 not used
LED XII X-axis Gantry 4 X-axis Gantry 3
LED YI Y-axis Gantry 1 not used
LED YII Y-axis Gantry 4 Y-axis Gantry 3
LED DIS active inactive
Tab. 5.3 - 1 Description anti crash board HF 3
1 - 15
Student Guide SIPLACE HF/HF3
Edition 09/2005 5 Gantry
15
5.3.5 Mechanical adjustment the incremental encoder
The incremental encoder on the X- and Y-Axis must be adjust of a distance of 0,4 mm +/- 0,1 mm
to the incremental scale.
Please Note:
For adjust the distance use a plastic feeler gauge of 0,4 mm.
After this adjustment of the incremental encoder you have to check the zero pulse and track sig-
nals (see chapter Tracksignals and Zeropulse).
Notes: