SG_FSE_SiplaceHF_HF3_00193901-05_eng.pdf - 第112页
1 - 42 S tudent Guide SIPLACE HF/HF3 3 Communication and Control Edition 09/2005 42 3.4.3 Axis controller The Axis contr oller receives the T arget position and S tart signal from the MC , all necessary ca lcu- lations a…
1 - 41
Student Guide SIPLACE HF/HF3
Edition 09/2005 3 Communication and Control
41
The Deceleration section increases the amplitude again to reduce the speed of the axis mecha-
nics. The frequency become lower and lower (3). The final action is the overshoot control at target
position.
So there is nothing to adjust all this axes have a dynamic behavior. Each axis mechanics has an
internal friction. The higher the friction is the higher the amplitude at acceleration and constant
speed section - but the lower the amplitudes at the deceleration section.
This higher motor force at acceleration and constant speed clearly can be seen at the ’uncommu-
tated nominal current signal’. A high friction at the axis mechanic reduce the necessary force from
the motor so the amplitude at the deceleration section is visible at ’uncommutated nominal current
signal’, is smaller.
Please Note:
Mechanical or electrical faults can be seen from the dynamic signals of the axis.
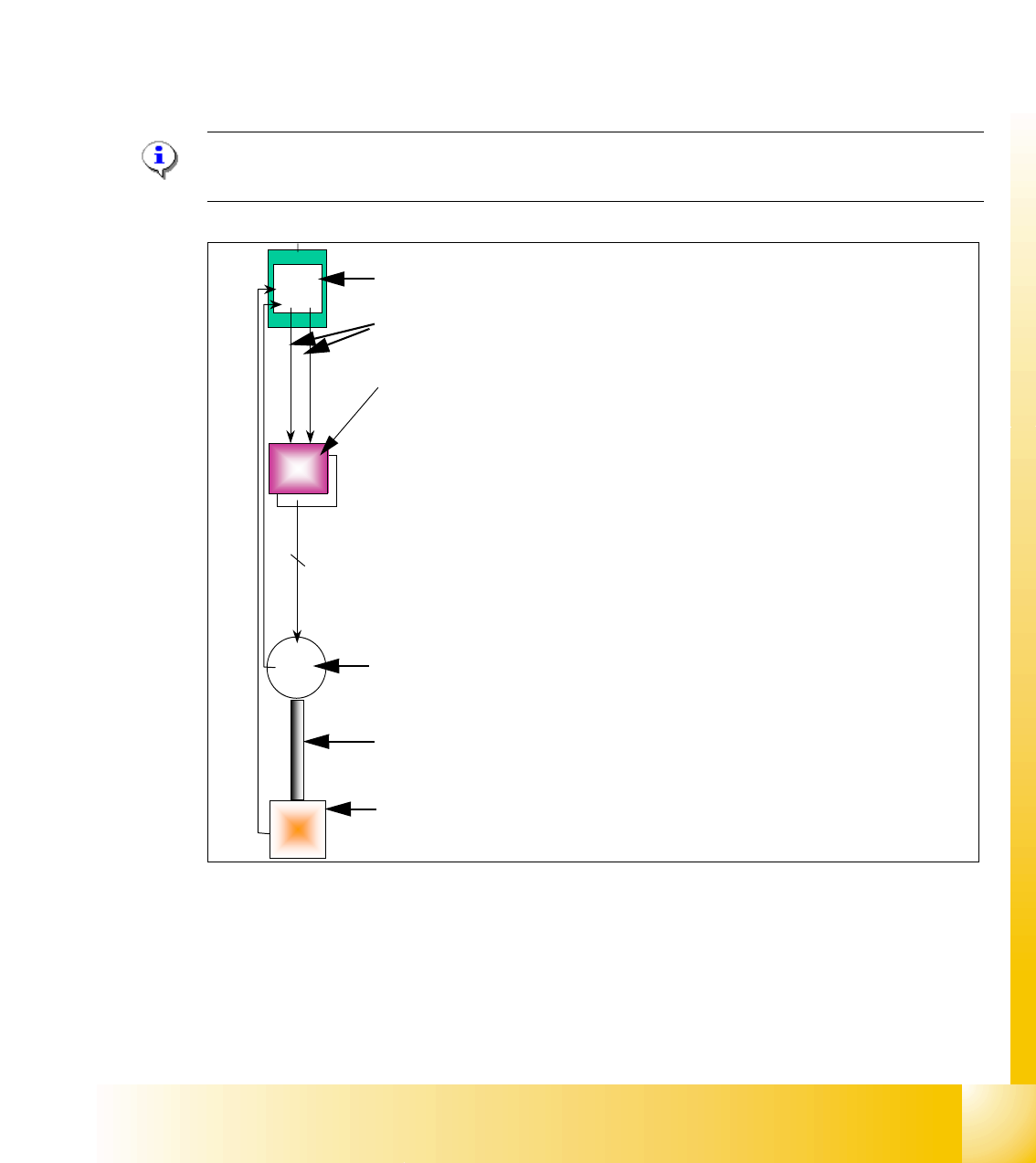
Fig. 3.4 - 9 Axis block diagram example X or Y-axis of HF machine
The different axis types may differ a little but all control work is done by the VC 3 controller on the
axis controller board, 2 control signals for 2 or 3 phase axis drive. For DC-drives we use the same
hardware principle with only 1 control signal to the Servo amplifier.
The only feed back loop are the Track signals from the encoder to the VC 3 controller. (a available
tacho (Z-/DP Axes) is not connected to the system).
Brake
board
VC 3
cont
Servo
ampl.
M
3 ~
Enco-
der
3
Axis controller board A363 with VC 3 Controller
(VC = Velocity Commutation)
Control signals I
nom "W" and I nom "U"
Function at Servo amplifier:
motor current limiter according to the semiconductor or motor load
amplification of the axis controller signals.
determine the 3rd motor current signal.
generating the 3 (2) AC-motorsignals from the DC-power supply.
The X/Y Servo board output signals are connected to the ’Brake board’.
This guarantees operator safety when the safety covers are opened.
3 Phase AC Motor with Temperature sensor inside.
Between the motor and the incremental encoder is a fixed mechanical
connection.
Incremental encoder: traces the exact position of the axis via the track
signals.
1 - 42
Student Guide SIPLACE HF/HF3
3 Communication and Control Edition 09/2005
42
3.4.3 Axis controller
The Axis controller receives the Target position and Start signal from the MC, all necessary calcu-
lations and controll functions are done on the axis controller.
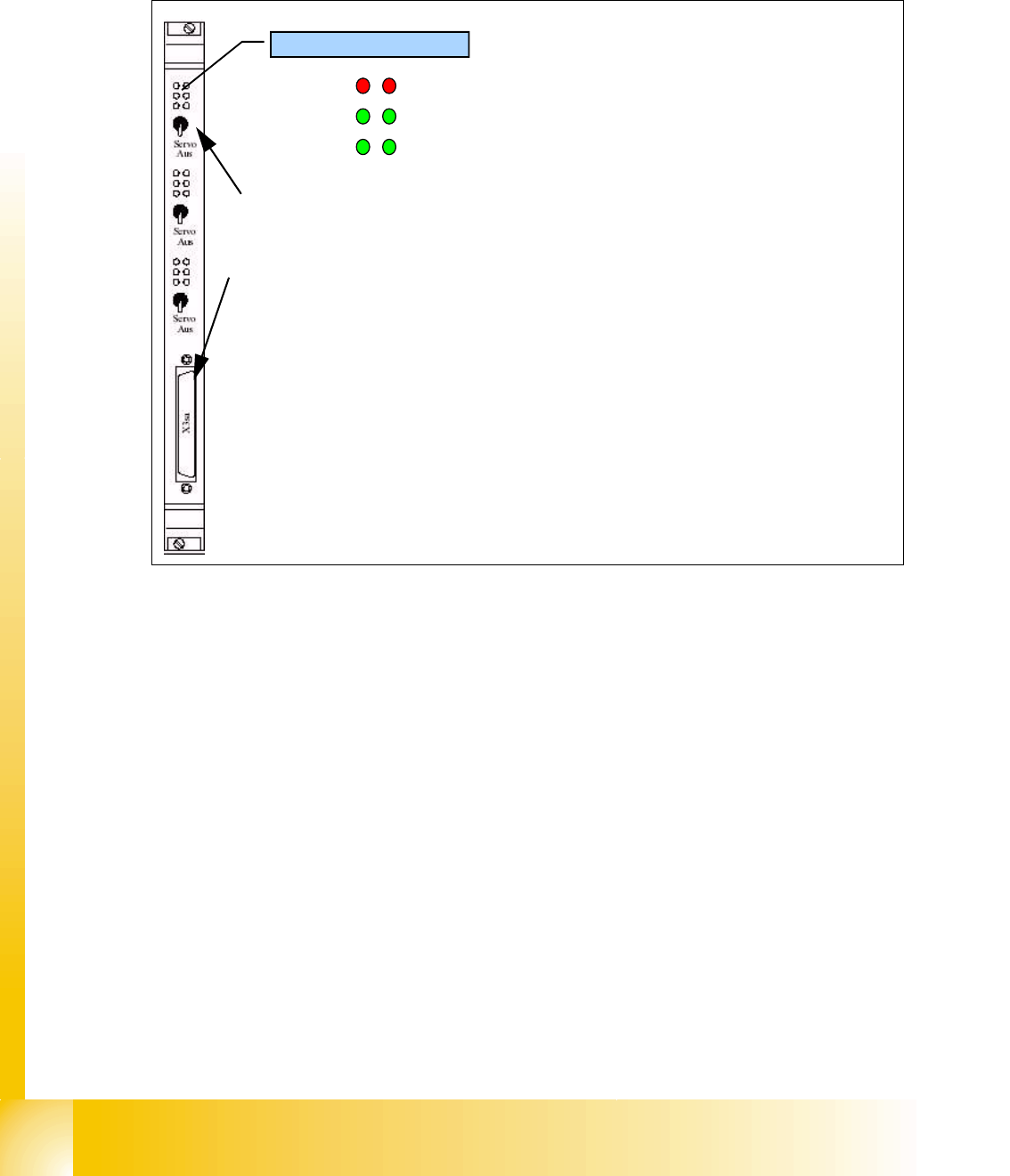
Fig. 3.4 - 10 View of axis controller board A363 of a HF machine
The Axis controller A 363 are slot coded. This means no address switches have to be set at a
spare part exchange. The Axis controller main board have for each axis type an additional VC 3
controller.
The complete axis control function is done at this Axis controller VC3 controller combination.
Therefor - a BIOs SW
- a Firmware to the Axiscontroller (Application 1) on the Mainboard and
- a Firmware to the VC 3 controller (Application 2)
is loaded.
Because of different types of drives and different control modes this Firmware version may differ
for the axis types. This means the Axis controller can not be swapped very easily to other posi-
tions for different Axis types .
Count error
Inverted
Zero pulse
End signal
Board error
Iinitialized
Servo ON
LED´s state Display
Three Axis controllers on board
Each of them have a manual switch to disable Servo Amplifier.
For each axis controller a few control signals are connected to the front Test connector.
(track A/B/Zero pulse / Start/actual pos. is nominal pos./endsignal/uncom.nom.current
/ Vnominal/Force)
1 - 43
Student Guide SIPLACE HF/HF3
Edition 09/2005 3 Communication and Control
43
3.4.3.1 Servo amplifier TBS .. and SDS ...
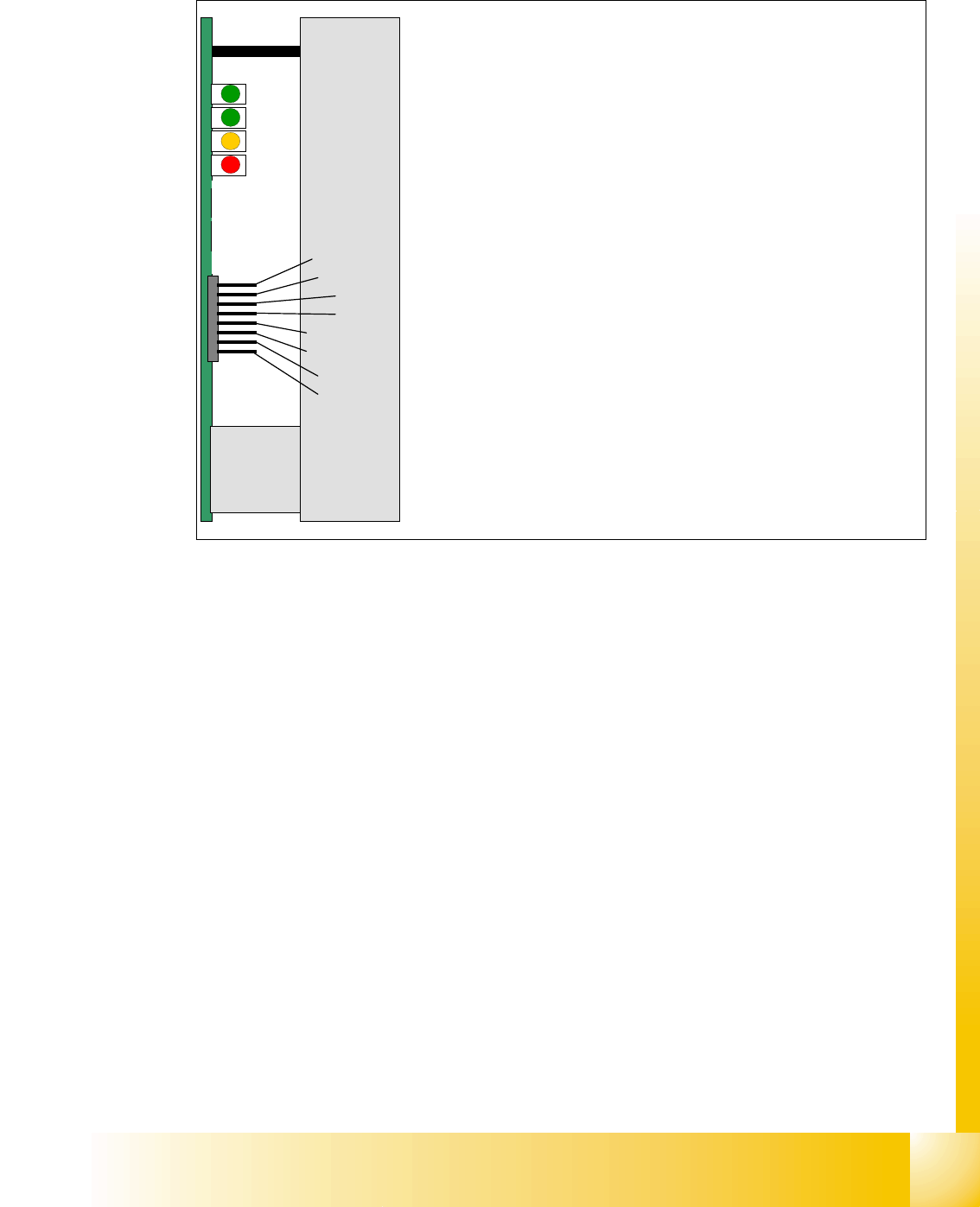
Fig. 3.4 - 11 Servo amplifier
This SDS and TBS Servo amplifiers are to reset by Servo disable / Servo enable at Axis controller
board.
All Servos special adjusted to the maximum current of the drive motor of the refering axis type.
This mean the servo amplifiers have to be mount axis specifically.
Nominal current I
U
Nominal current I
W
Actual current I
U
Actual current I
W
Outp. Current controller Voltage V
U
Outp. Current controller Voltage V
W
Error
GND
Ready
Servo Enable
I
RMS
error
Board error
The nominal current signals also measurable at V nominal / Force
output of Axis controller
The Pin 3/4 show the actual current signals to the motor.
This signals are 180° phaseshifted to the nominal signal.
The Pin 5/6 show the voltages to drive the sinusoidal current
Ready is ON when Machine is ON
Servo Enable is first activated with a start of reference run. At X/Y
axis it is disabled after 2 min. without action and at Service posi-
tion.
I RMS error light up at short over current pulses.
Board error is a ’permanent’ error like over voltage / over current /
over temperature.