HM_Series_Administrator′s_Guide(Chi_Ver2.5)校正.pdf.pdf - 第270页
6-10 Cutting-edge Modular Mounter HM Series A dministrator's Guide < 点到点 > 选项按钮 是指对 array 的第一个贴装 点, 第二个 array 的第一个贴装点, 最后 array 的第 一个贴装点完成作业后按第一个 array 的第二个贴装带你顺 序进行作业。 一般喷嘴更换频繁时以 ‘ 贴装点 ’ 优先顺序作业的效率较高。 但是如果 P…
6-9
优化
6.5. Parameter
图
6.6 "
优化设置
: Parameter"
对话框
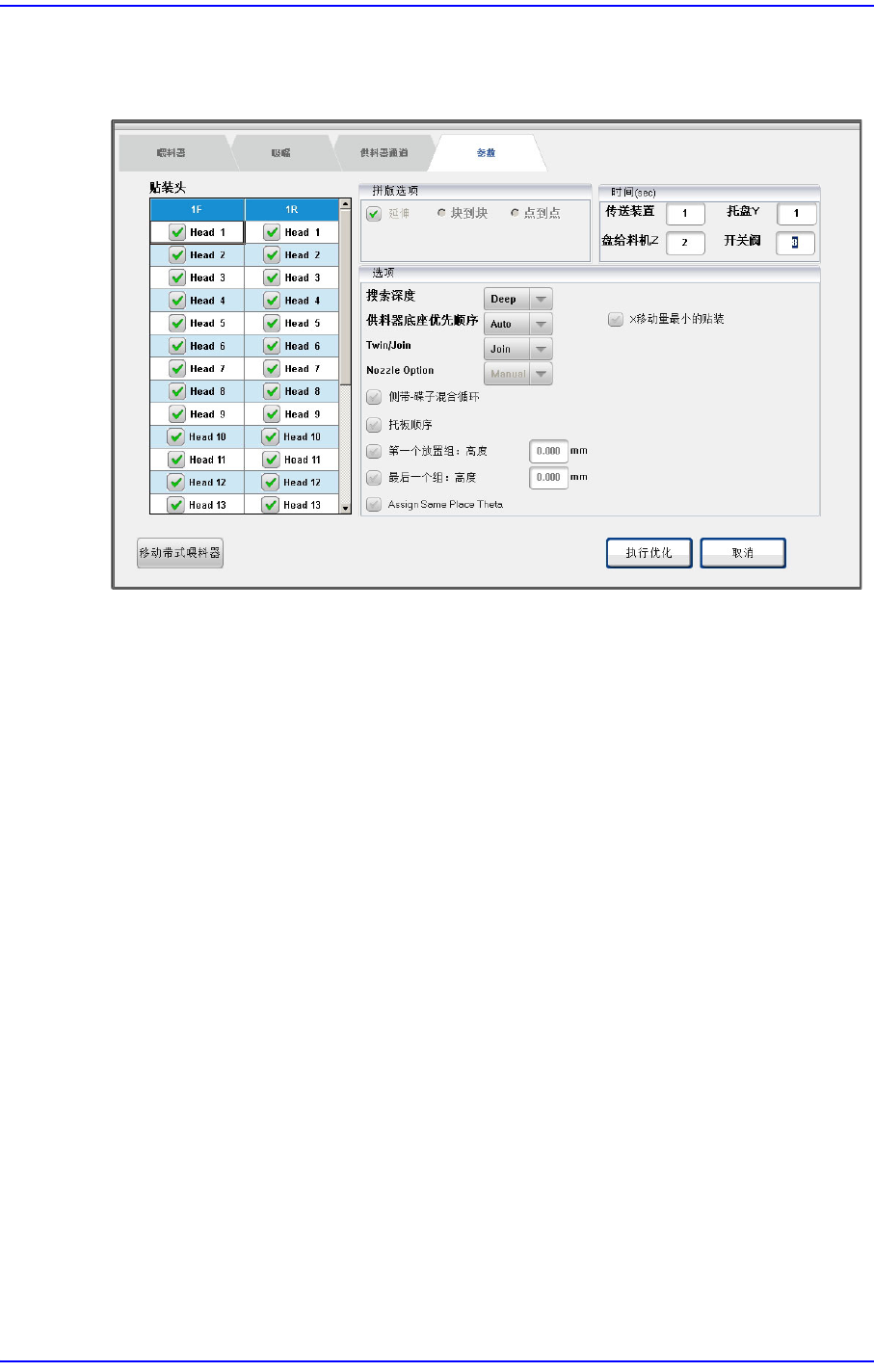
最后在执行优化时设定要使用的选项和参数。
<头> 检查领域
各Head分别设置使用与否。
<使用> 检查框
表示是否使用相应HEAD。 例如,3号Head有问题无法作业时选择3号Head
的校验框清空。
那么在optimizer使用除使用停止的HEAD 以外的剩下的HEAD生成作业程
序。所有Head均为使用中止状态则无法执行最佳化作业。
<阵列选项> 领域
编辑拼板PCB 时用来指定 MMI 步骤程序的优化选项和标示方法。
<延伸> 检查框
如果是array PCB可选择<扩张>校验框。此时 MMI把一个Array PCB假定为
包括所有排列安装点的一个PCB 而实施最优化,这样可以提高整个操作效
率。
如果未选择<Extend>复选框,就可以选择‘块到块’, ‘点到点’中的一个。
<块到块> 选项按钮
使Optimizer可以对一个小型PCB 执行最佳化后依次对多个小型PCB进行作
业生成STEP程序。

6-10
Cutting-edge Modular Mounter HM Series Administrator's Guide
<点到点> 选项按钮
是指对array的第一个贴装点,第二个array 的第一个贴装点,最后array的第
一个贴装点完成作业后按第一个 array 的第二个贴装带你顺序进行作业。
一般喷嘴更换频繁时以‘贴装点’优先顺序作业的效率较高。
但是如果PCB不良太多则下降作业效率。
<时间(sec)> 编辑 盒领域
此领域用来输入执行设备的每个动作所需的时间,并计算在优化中的作业时
间。另外,盘式喂料器Y and盘式喂料器Z 的值可以影响作业顺序的决定。
因此,为了提高作业效率及估算作业时间的精确度要输入尽可能接近真实值的
数值。
传送装置: PCB搬入到作业站到由backup table固定所需要的时间(SEC)
盘式喂料器Y: Multi-多盘式喂料器的盘式喂料器在 Y方向移动所需时间
(sec)。
盘式喂料器Z: Multi- 多盘式喂料器的盘式喂料器在 Z方向移动所需时间
(sec)。
开关阀: Shuttle 盘式喂料器的 PAD 往返 1 次所需时间(sec)。
<选项> 领域
设置对Optimizer中执行的最佳化法则的选择条件。
<Search Depth> 组合框
选择贴装顺序可达到最优化的水准。
Quick
Optimizer最近的贴装点为基准最优化贴装顺序的方式,最优化所需要的
时间相对短。
Deep
所有贴装点为对象Optimizer
比较可贴装的所有情况数来决定最优化的
贴装方式,最优化所需要的时间长。
<FDR基础优先 > 组合框
Optimizer排列feeder时可以选择优先顺序。
Auto
Optimizer自动配置喂料器。
Front
Optimizer优先配置前面feeder base 的喂料器。
Rear
Optimizer优先配置后面feeder base 的喂料器。
6-11
优化
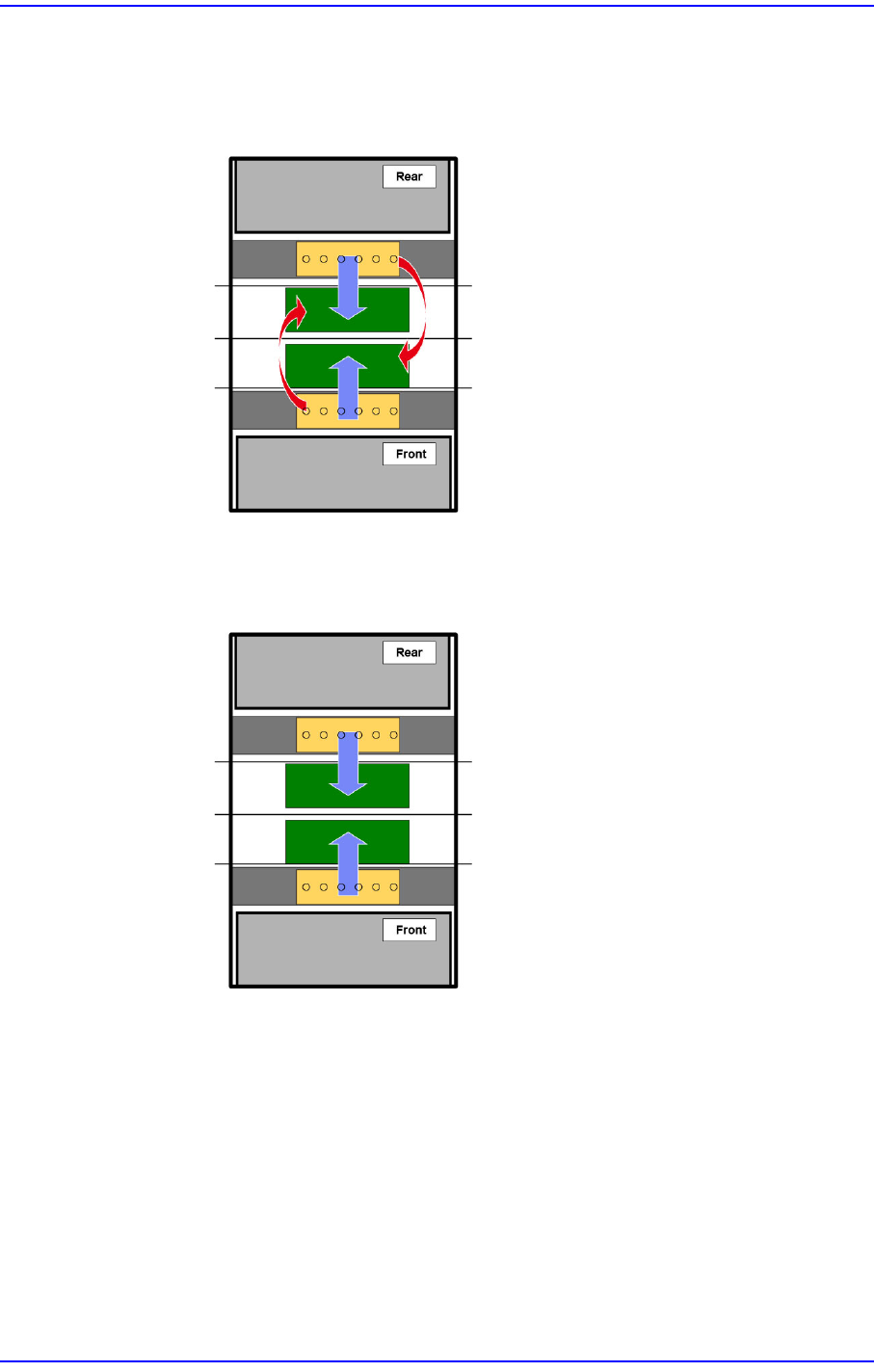
<Join/Twin基础优先> 组合框
对于在搬入输送机的PCB上贴装元件的悬臂指定优先顺序。
Join
在正面与背面少量生产同一型号时选择。正面与背面能够共同使用供料
器,因此只安装较少的供料器后生产时可以选择该型号。
Twin
在正面与背面批量生产同一型号时选择。需要在正面与背面各自安装供
料器,因此需要较多供料器。
Join (Partial Twin)
在正面与背面以结合模式(join mode)与双动模式(twin mode)混合的形态
生产同一型号时使用。
如下图所示,在贴装①、②、③元件的型号中指定给元件①的贴装点很
多而指定给其余元件(②、③) 的贴装点少时,正面与背面的悬臂以结合
模式(join mode)贴装元件①而其余元件(②、③)则以双动模式(twin
mode)贴装。