HM_Series_Administrator′s_Guide(Chi_Ver2.5)校正.pdf.pdf - 第361页
11-13 Diagnosis( 诊断 ) 11.8. Feeder 显示出用于补偿供料器所供应的 元件的吸取位置的偏移量、 该元件上设定的料 槽示 教条件及适应性 (adaptive) 吸取条件。 备注 可以在 "Feeder" 查看把 MMI 的元件信息设 定成使用 "Adaptive Pick Up" 选项 或 "Enable Pocket T each" 选项后生产 P…
11-12
Cutting-edge Modular Mounter HM Series Administrator's Guide
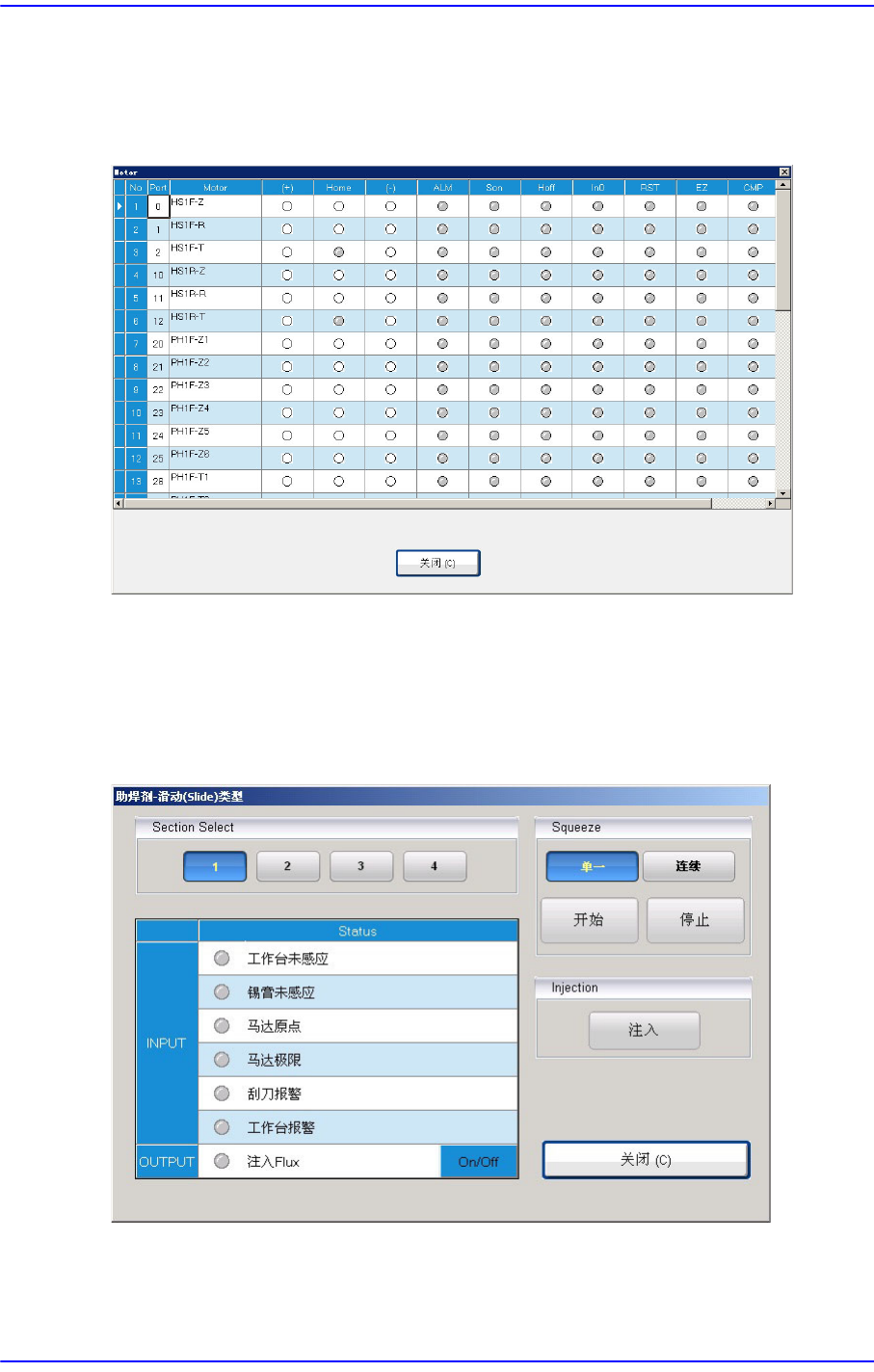
11.6. 电动机 I/O
显示与驱动电动机有关的传感器输入状态。
图
11.8 “ Motor”
对话框
11.7. Flux
显示有关助焊剂的感应器的输入状态。
图
11.9 “ Motor”
对话框
11-13
Diagnosis(
诊断
)
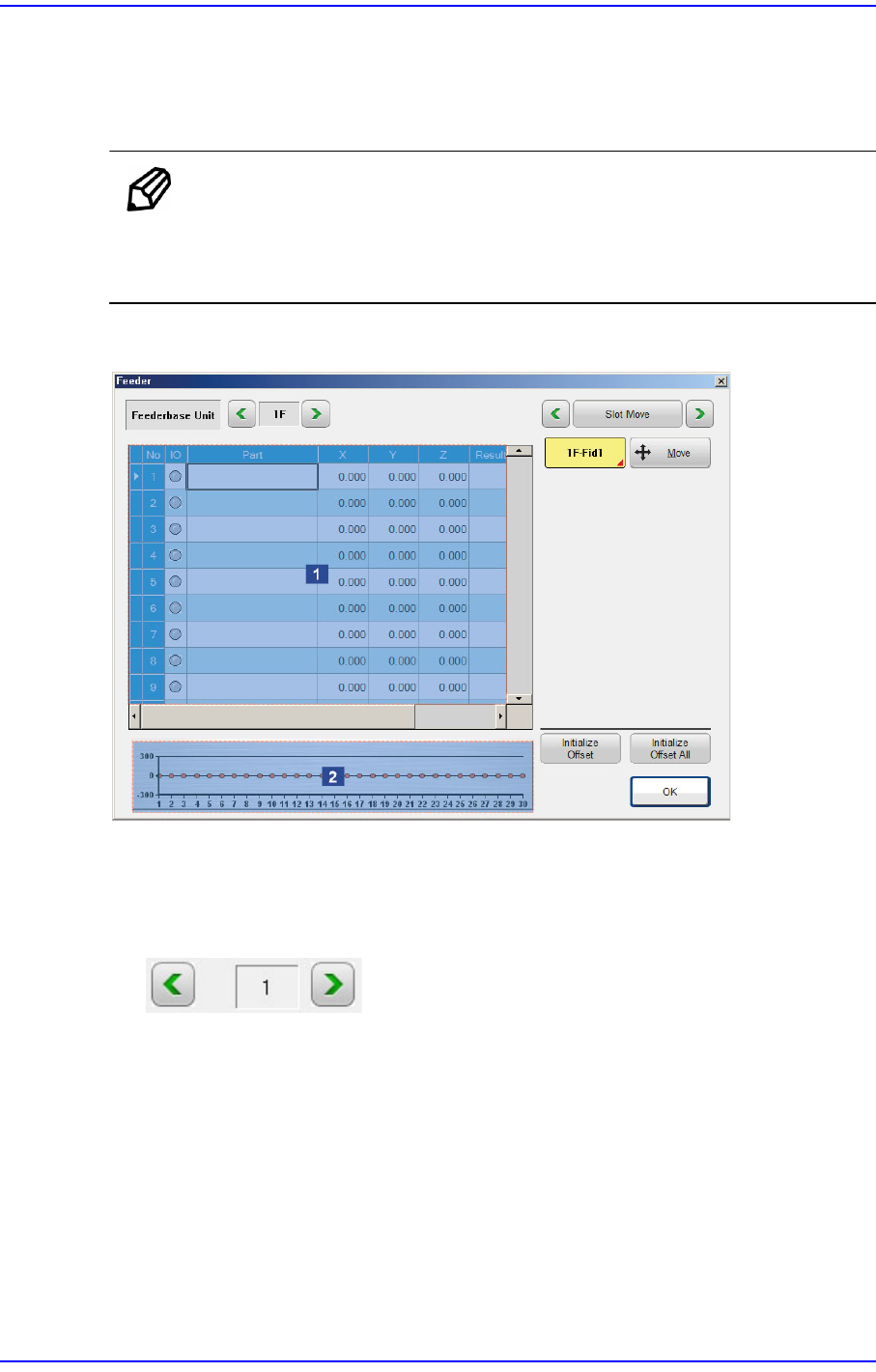
11.8. Feeder
显示出用于补偿供料器所供应的元件的吸取位置的偏移量、该元件上设定的料槽示
教条件及适应性(adaptive)吸取条件。
备注 可以在"Feeder"查看把MMI 的元件信息设定成使用"Adaptive
Pick Up"选项或"Enable Pocket Teach"选项后生产PCB时产生的
数据。详细内容请参阅“3.2.2.7.2D 公共数据”。
图
11.10 “ Feeder”
对话框
1: Grid
2: Graph
工作站选择用箭头键
触摸箭头按钮选择供料器底座。
<Grid>领域
显示出安装在供料器底座的供料器所供应的元件的吸取点补偿偏移量(offset)与
料槽示教条件。
<Graph>领域
以曲线显示出安装在供料器底座的供料器所供应的元件的吸取点补偿偏移量
(offset)Z。
11-14
Cutting-edge Modular Mounter HM Series Administrator's Guide
<站位移动/喂料器移动> 按钮
选择Slot别移动所选Device 还是设置Tape Feeder 的 Slot别移动所选Device。每次
点击此按钮时轮着设定“站位移动”和 “ 喂料器移动”。
站位移动 时
按钮选择当前选定Slot以前的Slot, 按钮选择当前选定Slot的 以后
Slot。
喂料器移动 时
按钮在当前选定的设置 Feeder 的Slot的以前Slot 中选择设置Tape Feeder
的Slot(按Slot序号小的顺序), 按钮在当前选定的设置Feeder的Slot 的以
后Slot中选择设置Tape Feeder 的Slot。( 按Slot 序号大的顺序)
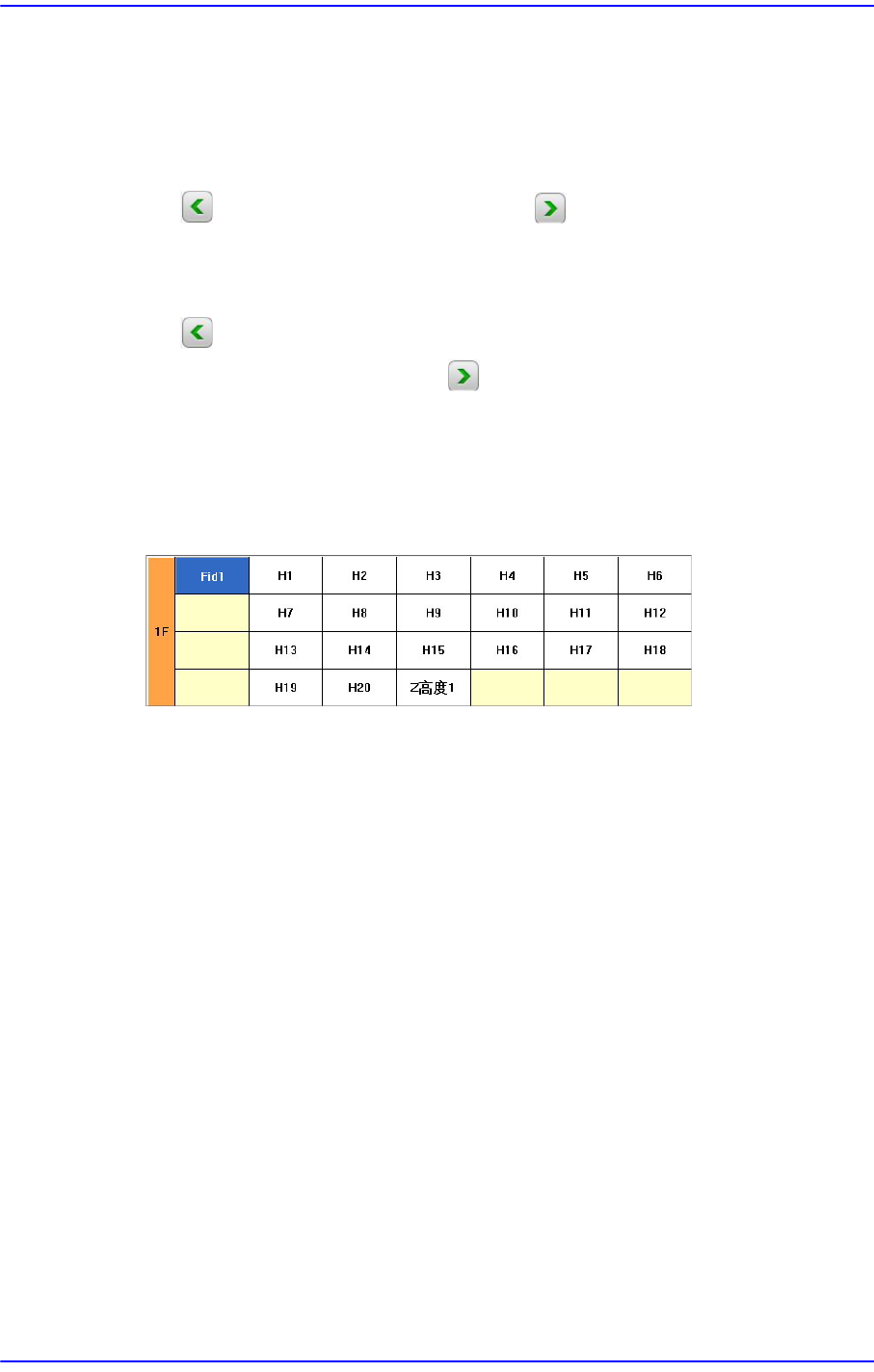
Selection control
旋转XY轴的驱动马达选择要移动到所选带式喂料器的吸附点的对象或选择想
要了解当前坐标的对象时使用。 可选择的对象如下。
Fid1
选择对应Gantry的‘Fiducial camera1’。
H1 ~ H20
选择
1号~20号head。
Z高度1
可以在采用Height感应器的设备进行选择,该功能用于测量 Z 轴高度的自动
测量。
<移动> 按钮
Selection control框选定的对象移动到带式喂料器的吸附点。在按压该键之前,需
要在<Grid>领域选择该带式供料器。
<Initialize Offset>按钮
把在<Grid>领域中选择的供料器的吸取点补偿偏移量(offset)与料槽示教条件加
以初始化。
<Initialize Offset All>按钮
把在<Feederbase Unit>中选择的供料器底座上安装的所有供料器的吸取点补偿
偏移量(offset)与料槽示教条件加以初始化。