HM_Series_Administrator′s_Guide(Chi_Ver2.5)校正.pdf.pdf - 第363页
11-15 Diagnosis( 诊断 ) 11.9. Nozzle 可通过固定摄像头识别安装在头 部的吸嘴的中心, 从而检查每个头部的吸嘴中 心偏 移程度 (Nozzle Center Offset) 。 有关此功能的 详细信息, 请参阅 '13 .5.1. 一般 ' 的 '<Nozzle center check> 选择框 ' 部分。 备注 如想使用此功能, 请在 < 系统设…
11-14
Cutting-edge Modular Mounter HM Series Administrator's Guide
<站位移动/喂料器移动> 按钮
选择Slot别移动所选Device 还是设置Tape Feeder 的 Slot别移动所选Device。每次
点击此按钮时轮着设定“站位移动”和 “ 喂料器移动”。
站位移动 时
按钮选择当前选定Slot以前的Slot, 按钮选择当前选定Slot的 以后
Slot。
喂料器移动 时
按钮在当前选定的设置 Feeder 的Slot的以前Slot 中选择设置Tape Feeder
的Slot(按Slot序号小的顺序), 按钮在当前选定的设置Feeder的Slot 的以
后Slot中选择设置Tape Feeder 的Slot。( 按Slot 序号大的顺序)
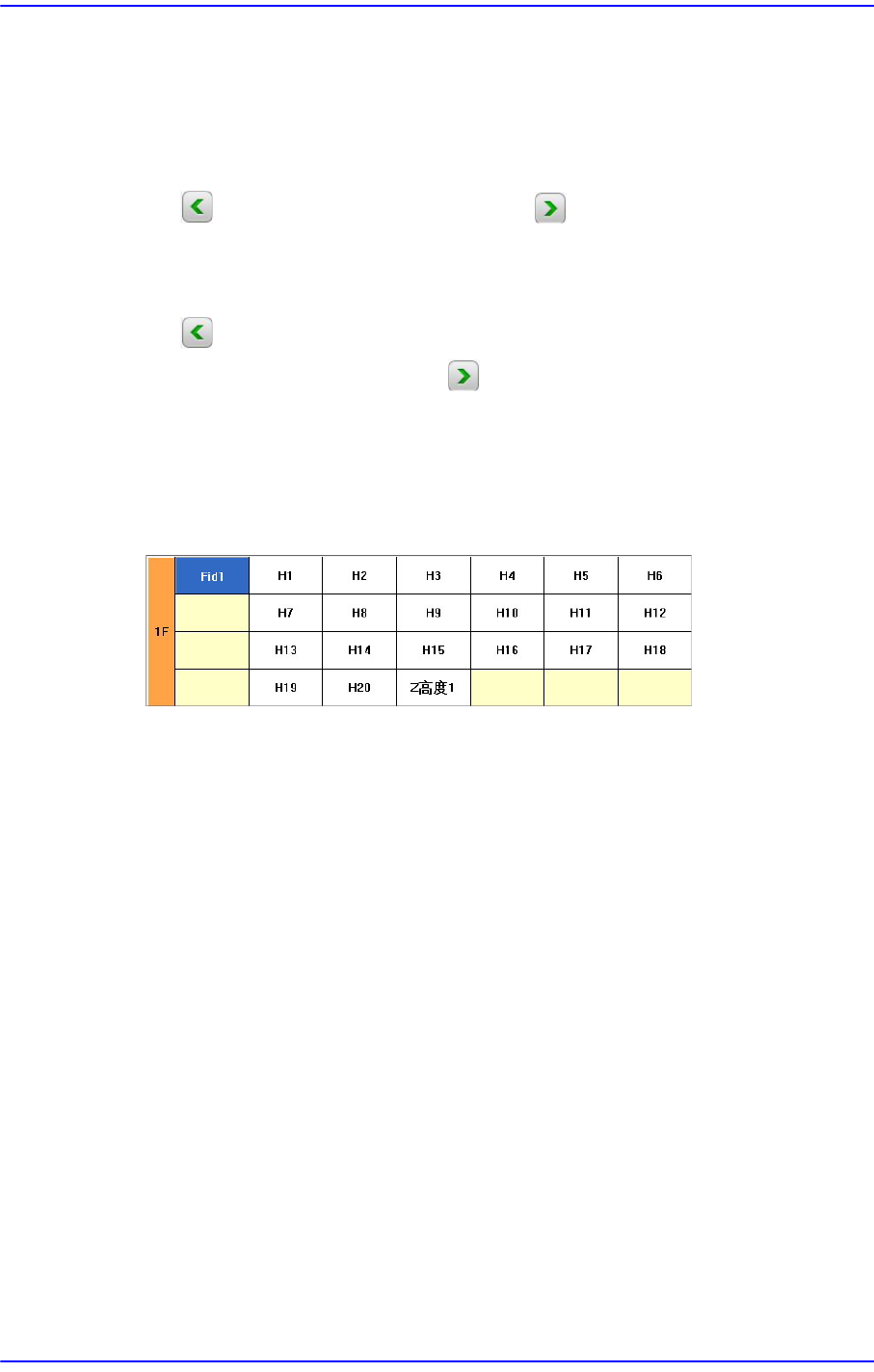
Selection control
旋转XY轴的驱动马达选择要移动到所选带式喂料器的吸附点的对象或选择想
要了解当前坐标的对象时使用。 可选择的对象如下。
Fid1
选择对应Gantry的‘Fiducial camera1’。
H1 ~ H20
选择
1号~20号head。
Z高度1
可以在采用Height感应器的设备进行选择,该功能用于测量 Z 轴高度的自动
测量。
<移动> 按钮
Selection control框选定的对象移动到带式喂料器的吸附点。在按压该键之前,需
要在<Grid>领域选择该带式供料器。
<Initialize Offset>按钮
把在<Grid>领域中选择的供料器的吸取点补偿偏移量(offset)与料槽示教条件加
以初始化。
<Initialize Offset All>按钮
把在<Feederbase Unit>中选择的供料器底座上安装的所有供料器的吸取点补偿
偏移量(offset)与料槽示教条件加以初始化。
11-15
Diagnosis(
诊断
)
11.9. Nozzle
可通过固定摄像头识别安装在头部的吸嘴的中心,从而检查每个头部的吸嘴中心偏
移程度(Nozzle Center Offset)。有关此功能的详细信息,请参阅'13 .5.1.一般' 的
'<Nozzle center check>选择框 ' 部分。
备注 如想使用此功能,请在<系统设置 > 中选择<Nozzle center check>
选择框。
设置路径:<系统设置>→<选项设置> →<一般 >→<Nozzle
center check>
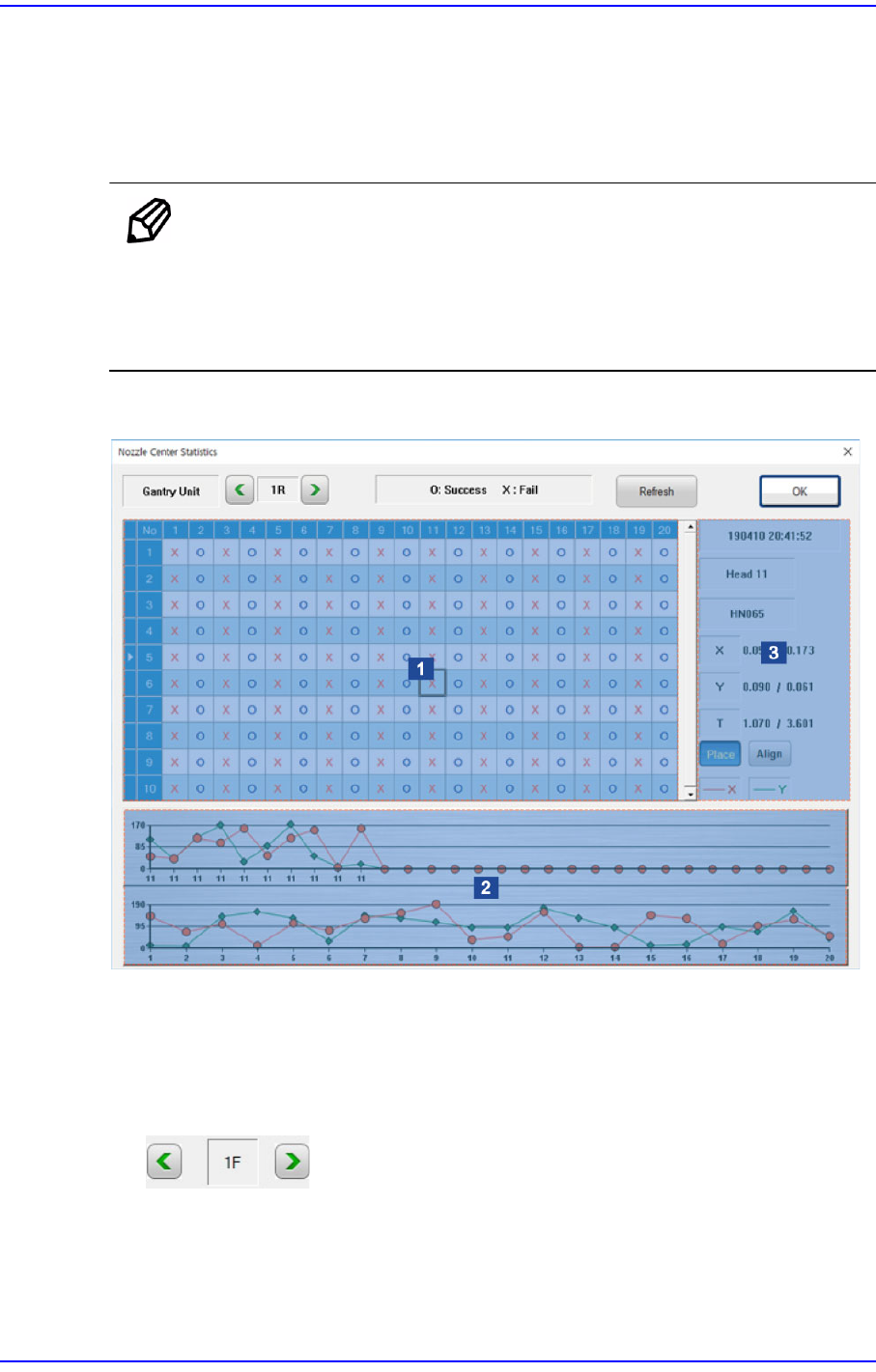
图
11.11 “Nozzle”
对话框
1: Grid
2: Graph
3: Detail
<Gantry Unit>箭头按钮
点击箭头按钮选择悬臂单位。
<Refresh(刷新)>按钮
如想更新“Nozzle Center Offset”检查结果,请选择此按钮。选择此按钮,可对

11-16
Cutting-edge Modular Mounter HM Series Administrator's Guide
“Grid”及“Grape”区域内显示的检查结果进行更新。
‘Grid’ 区域
以“ O”,“ X”显示安装在每个头部的吸嘴的Nozzle Center Offset检查结果。
横轴表示头部的顺序,纵轴表示时间。
<Graph>区域
以图表形式显示安装在每个头部的吸嘴的Nozzle Center Offset检查结果。该图表
的值将根据“'Grid”区域内选择的结果值发生变动。
上方的图表以Head为单位显示相应数值,下方的图表则按照时间显示所选
Head。
<Detail> 区域
显示有关“'Grid” 区域内所选结果值方面的详细信息。
具体将显示所选结果的检查日期和时间,喷头编号和吸嘴信息,并通过“Place
Height”和“Align Height”标记X、Y、Z 的偏移量。
<Place>选项按钮
以Place Height测量的Nozzle Center Offset显示图表数值。
Place Height是通过将主轴(Spindle)降低到安装高度后测出来的偏移量。
<Aligh>选项按钮
以Align Height 测量的Nozzle Center Offset显示图表数值。
Align Height是在主轴(Spindle) 拾取元件后从固定摄像头可识别的位置测出
来的偏移量。