RX-6_维修调整要领书.pdf - 第13页
维修调整要领书 1-5 1- 2 限位传感器、接近传感器的更换 1 ) 仅更换传感器时,不需要调整位置。 2 ) 包括托架一起更换时,就必须进行位置调整。 1-2 - 1 X + / -传感器、 X 接近传感器的安装 1 ) 松开用于固定 X 限位传感器托架的螺丝,进行临时性固定,要使距 X 直线导轨端面的距离成上图 尺寸,再调整位置,要做到从接触限动器橡皮的点至身前方向 6mm 之间传感器会启动 ON 。 2 ) 前后方向上进行固定时…
维修调整要领书
1-4
1-1-3
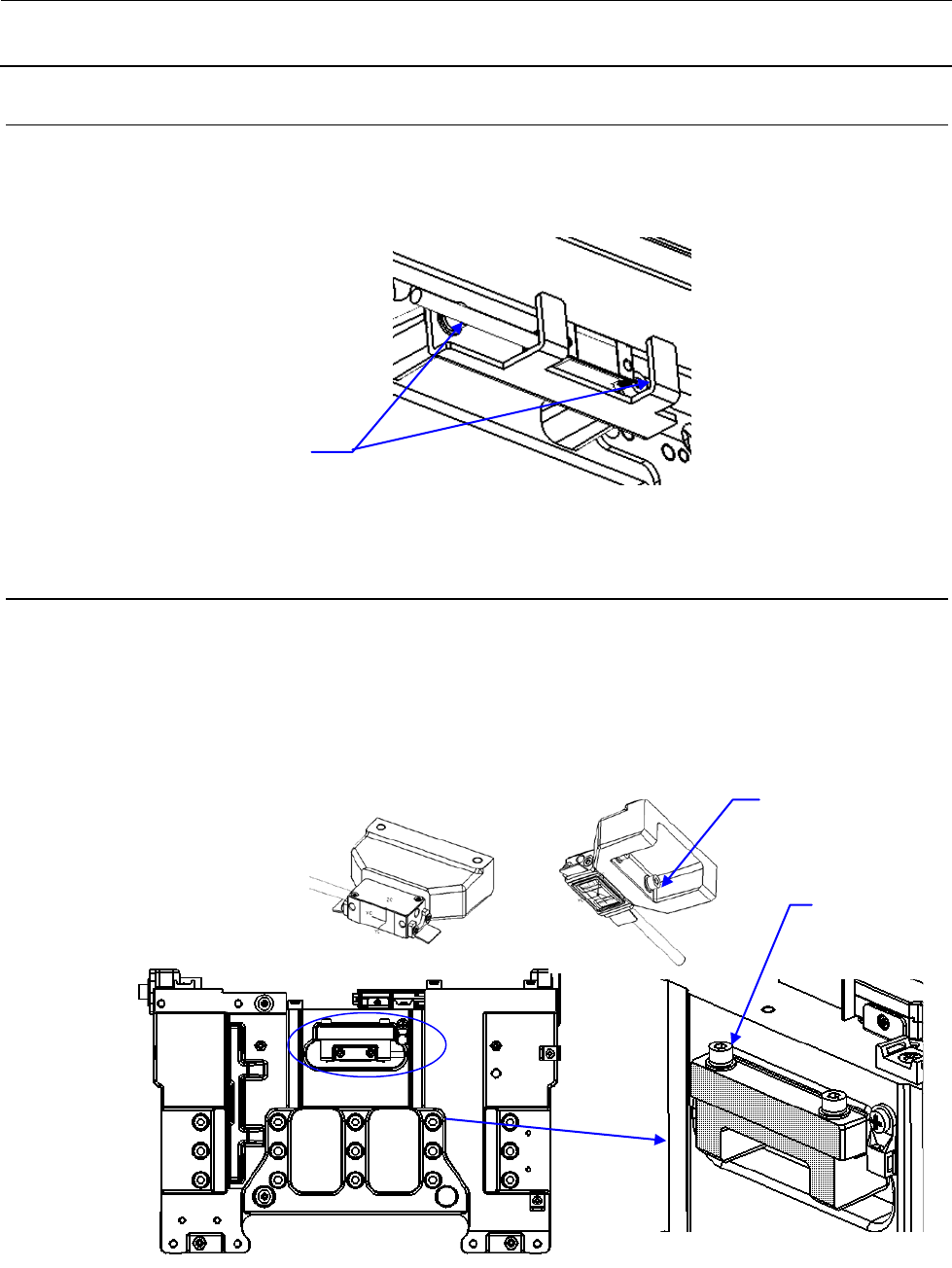
X轴磁尺的间隙
1) 松开用于固定传感器的螺丝,调整到磁尺与传感器感应头的空隙(货号 40008106)中正好可插入
t0.25mm,而 t0.3mm 不能从两侧插入,再旋紧螺丝。
1-1-4
Y轴磁尺的间隙
1) 将电磁标尺磁头用 M3 螺丝装到 Y_MSH 托架上。(临时旋紧)
2) 将块规等顶住影线部的端面,用 M4 螺丝组装 Y_MSH 托架和直线基座,要做到邻接面处于同一水平
面。
3) 调整到磁尺与传感器感应头的空隙(货号 40008106)中正好可插入 t0.25mm,而 t0.3mm 不能从两
侧插入,再旋紧螺丝。
M4 带垫片螺丝
M3 带垫片螺丝
M4 带垫片螺丝
维修调整要领书
1-5
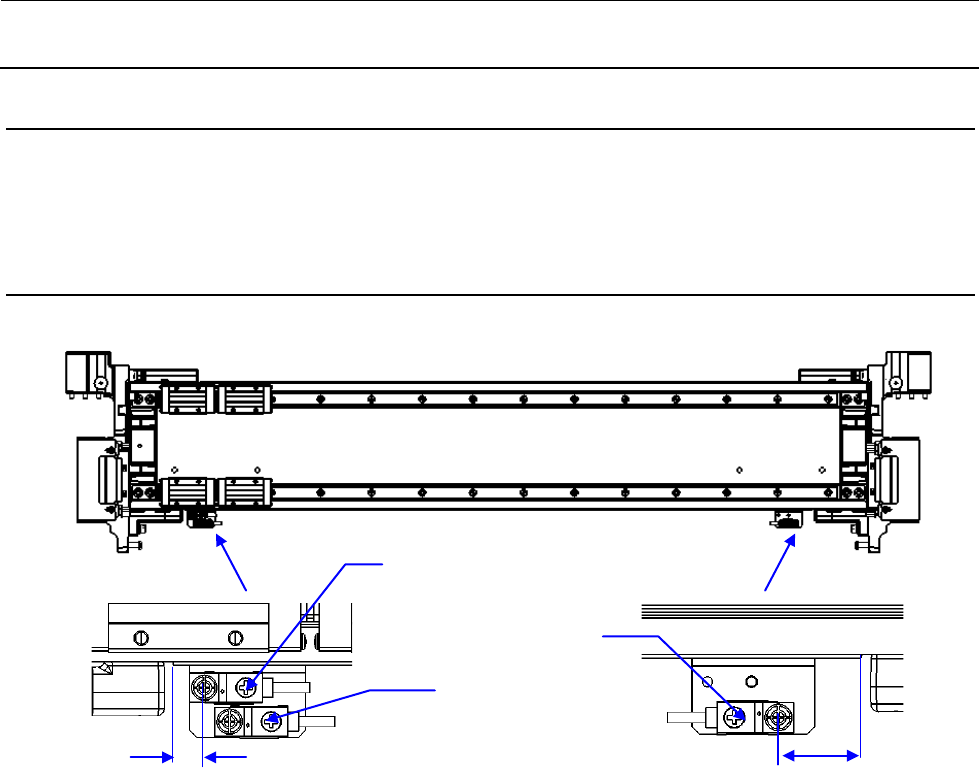
1-2
限位传感器、接近传感器的更换
1) 仅更换传感器时,不需要调整位置。
2) 包括托架一起更换时,就必须进行位置调整。
1-2-1
X+/-传感器、X接近传感器的安装
1) 松开用于固定 X 限位传感器托架的螺丝,进行临时性固定,要使距 X 直线导轨端面的距离成上图
尺寸,再调整位置,要做到从接触限动器橡皮的点至身前方向 6mm 之间传感器会启动 ON。
2) 前后方向上进行固定时,要使安装在贴装头板背面的 X 传感器 DOG 与传感器表面的空隙为 0.8~
1.5mm(目标 1.0mm)。
3) 利用主机软件控制达到软限位之后,伺服 OFF,确认以手动移动 2mm 以上时 X 限位传感器会 ON。
X 框架加工端~负向限位传感器中心
8.5mm
X 框架加工端~正向限位传感器中心
21.5mm
+X 限位传感器
接近传感器
-X 限位传感器
维修调整要领书
1-6
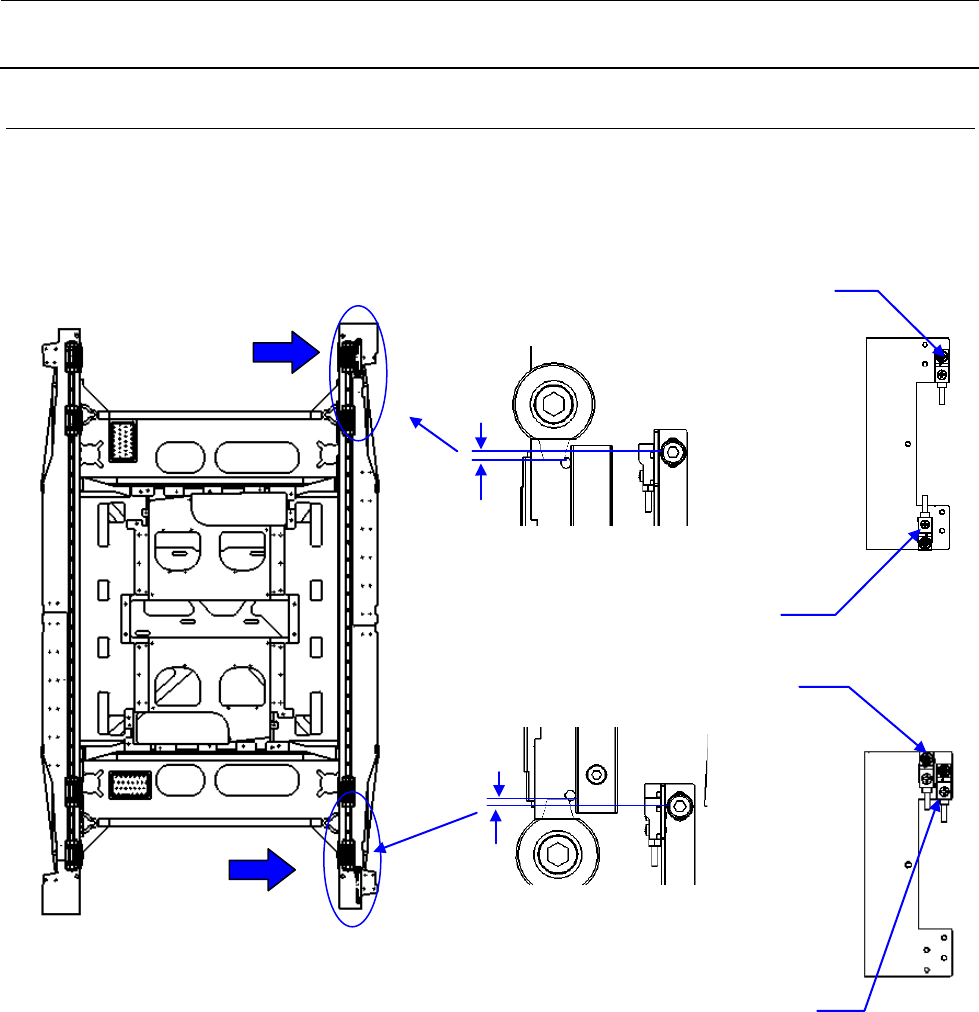
1-2-2
Y+/-传感器、Y接近传感器的安装
1) 松开用于固定 Y 限位传感器托架的螺丝,使得距限动器橡皮的尺寸成为图示的位置。
2) 调整 Y 传感器托架并固定,要使 Y 直线基座端与传感器表面的空隙为 0.8~1.5mm(目标 1.0mm)。
3) 利用主机软件控制达到软限位之后,伺服 OFF,确认以手动移动 2mm 以上时 Y 限位传感器会 ON。
前侧
后侧
+Y 限位传感器
前侧接近传感器
-Y 限位传感器
限动器橡皮~
限位传感器中心 3.7mm
限动器橡皮~
限位传感器中心 3.7mm
后侧接近传感器