00194614-08 Trainingsdoku. SG X-Serie_X4i SW70x (AL2)_EN.pdf - 第266页
Collect, Pick and Place Head (CPP) Configuration Overview Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 266 Configura tion 8.2.2 Configuration The CPP head with 12 segme nts c an be configured as fo llows: ▪ Low inst…
Collect, Pick and Place Head (CPP)
Important Information Application
265 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
Collect, Pick and Place He ad (CPP)
8 Collect, Pick and Place Head (CPP)
Importan t Inform ation
8.1 Important Information
Overview
8.2 Overview
Applicat ion
8.2.1 Application
The CPP head can be used in the following machines:
▪ X series (X2, X3, X4, X4I)
▪ SX1 - machine with one gantry
▪ SX2 - machine with two gantries
▪ SX4 - machine with four gantries
CAUTION
Head exchange X series
When replacing the TwinHead with a CPP head with MTC2 in this placement area, you need
to fit a bumper extension, to limit the Y travel range. After switching the machine back on, you
then need to redetermine the machine zero point and the travel ranges.
When you use a TwinHead again, you need to remove the bumper extension.
CAUTION
Risk of head crash!
When installing a CPP head with a stationary camera, this needs to be fitted in the top position
otherwise there is a risk of a head crash!
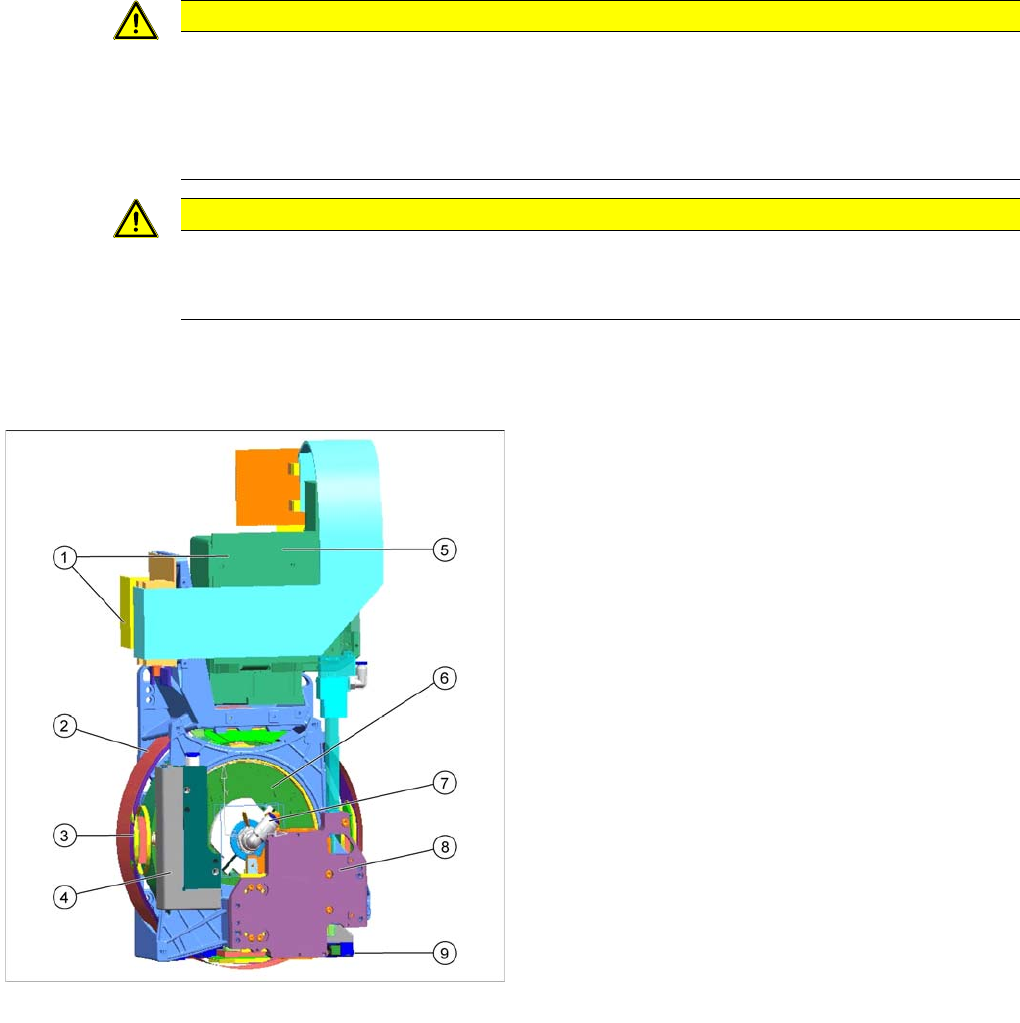
Overview of CPP head
CPP placement head without camera SST29
[03070108-xx]
CPP placement head with camera SST29 [03053528-xx]
Legend
1. Intermediate distributor 1 and 2
2. Star motor (integrated into the head housing)
3. DP axis (as direct drive)
4. Pressure control valve
5. Component camera (behind the intermediate
distributor, standard: SST29)
6. Single core solution (SCS) – DP drive control
7. Holding circuit supply, integrated venturi nozzles and
valve assembly (valve terminal)
8. Z axis with return cylinder
9. Component sensor in the pick and place position
Collect, Pick and Place Head (CPP)
Configuration Overview
Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 266
Configura tion
8.2.2 Configuration
The CPP head with 12 segments can be configured as follows:
▪ Low installation height (CPP_L)
▪ High installation height (CPP_H)
Requirem ents
8.2.3 Requirements
The following requirements need to be met for using the CPP head in X series machines:
▪ A364 axis controller with servo amplifier SDS120-1.5Z2 or HCU (Head Control Unit)
▪ Station software ≥ SW702
▪Box PC
▪ Head plate for CPP head
▪ X tables and X feeders
▪ Addressing the nozzle changer via the CAN node module or the FCU (Feeder Control Unit)
Technical Data
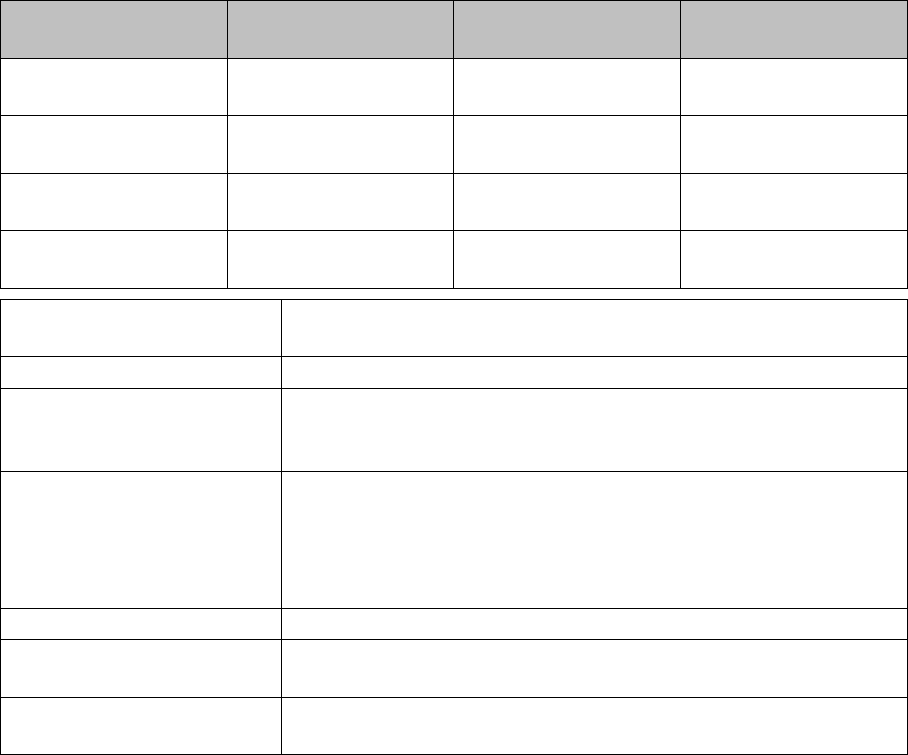
8.2.4 Technical Data
The component spectrum depends on the component camera fitted and the resulting placement mode.
Special Features of CPP Head
8.2.5 Special Features of CPP Head
▪ There are various placement modes: C&P mode, P&P mode and mixed mode.
▪ Symmetrical head design: The head can be fitted on the left or right.
Component spectrum Component camera
SST29
Component camera
SST38
IC camera SST33
C&P mode (min.
component)
0201 01005 (0603)
C&P mode (max.
component)
27x27 mm / (µBGA to
18x18 mm)
16x16 mm
P&P mode (max.
component)
50x40 mm
Mixed mode (max.
component)
32x32 mm
Component height (CPP_H) max. 8.5 mm C&P mode
max. 8.5-11.5 mm in P&P and mixed mode
Component height (CPP_L) max. 6 mm, at max. placement performance
Placement accuracy +/- 50 µm (4 sigma) in C&P mode with SST38
+/- 55 µm (4 sigma) in C&P mode with SST29
+/- 45 µm (4 sigma) in P&P mode with stationary cameras
Placement force 1 N +/- 0.6N current sensor
2.2N +/- 0.5N current sensor
2.6N +/- 0.8N light barrier mode
3.0N-6.0N +/- 1N current sensor
6.0N - 10.0N +/-1.5N current sensor
Weight of head approx. 5.3 kg with component camera
Component weight: max. 4 g in C&P mode, mixed mode
max. 8 g in P&P mode
Component cameras SST29 (0201 to 27x27, Standard)
SST38 (01005 to 16x16)
Collect, Pick and Place Head (CPP)
Overview Principle of CPP Head
267 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
▪ Component spectrum for component 01005 – 50x40 mm
Component height max. 11.5 mm
▪ The holding circuit has one venturi nozzle for each segment.
→ No more interference between the segments.
▪ Each segment has its own valve. Each segment can therefore be switched off separately.
This reduces the air consumption.
▪ Each segment has its own motor with incremental measuring system.
The segments can be rotated independently of one another.
▪ The light barrier down is integrated into each segment.
This leads to a higher placement reliability. There is no need to adjust the light barrier down. This
design is more robust, since a movable cable is not required.
▪ A digital pressure control valve enables faster switching times between vacuum and air blast.
▪ The component sensors in the pickup&place position are more robust. The prisms have mechanical
protection.
This leads to a higher placement reliability.
▪ Robust nozzle interface and nozzle magazine
▪ Nozzle types 20xx and 28xx with corresponding magazines
Principle o f CPP Head
8.2.6 Principle of CPP Head
▪ The CPP head functions according to the Collect&Place principle, like the C&P12 head, whereby the
additional operating modes Pick&Place and mixed mode help to extend the component spectrum.
▪ Each segment is equipped with its own DP drive and an incremental measuring system, to allow
angle adjustment while the star is revolving.
▪ Energy and data from the stationary part of the head are transferred via a contactless energy
transformer and a contactless data transformer to the control board (Single Core Solution) and the
DP drives.
▪ In addition, each DP drive has a light barrier Z down. Together with the secondary part of the linear
motor (Z axis), there is no cable which is moved with the Z movement.
▪ The so/called valve terminal is used to switch the supply pressure on and off for each segment.
▪ In the pickup and placement position, the Z axis moves with the complete DP drive unit upwards or
downwards.
▪ In the pickup cycle, the vacuum is increased by the holding circuit, using a pressure control valve.
During placement, the vacuum is eliminated by the holding circuit, with an air blast, and the
components are blown off.
▪ In the pickup/placement position, the standard component sensor is used to check the presence and/
or height of the components on the nozzle, both before and after pickup/placement.