00194614-08 Trainingsdoku. SG X-Serie_X4i SW70x (AL2)_EN.pdf - 第89页
Communication and Control CAN Bus CAN Bus Protocol 89 Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 4.3.2.2 CAN Bus Arbitrat ion [ ➙ 89] CAN Bus Protocol 4.3.2 CAN Bus Protocol CAN Bus Protocol ▪ Start This bit ind…
Communication and Control
General Structure CAN Bus
Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 88
The solution to this problem was the connection of the control systems via a serial bus system. This bus
had to fulfill some special requirements due to its usage in a vehicle. With the use of CAN, point-to-point
wiring is replaced by one serial bus Each module is given a CAN Bus connection. This is accomplished
by adding some CAN-specific hardware to each control unit that provides the ’rules’ or protocol for
transmitting- and receiving information via the bus.
Communication via CAN bus
General Structure
4.3.1 General Structure
See also
4.3.2 CAN Bus Protocol [ ➙ 89]
CAN Bus
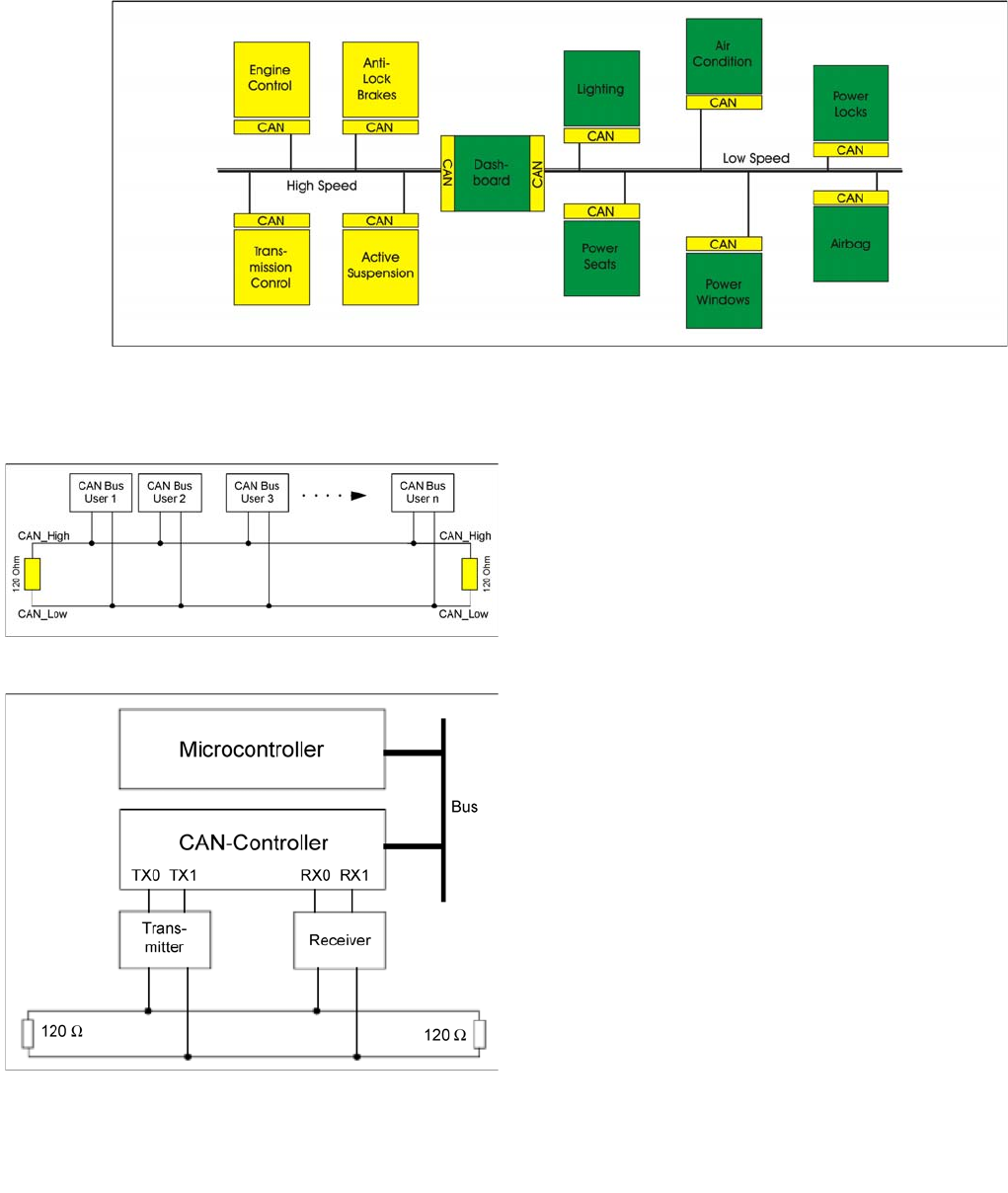
The CAN Bus is a decentral multi-master bus. The data
are transmitted via the differential voltage of the two
CAN_High and CAN_Low lines, which are each fitted with
a terminating resistance of 120 Ohm.
CAN Bus controller and microcontroller
Legend
▪ Microcontroller:
Exchanges data with the CAN controller
▪ CAN controller:
Adds the data frame, establishes the connection and
manages errors.
▪ Transmitter/receiver:
>Adjusts the level (driver levels)
Each bus node has a CAN controller, which can transmit
and receive data if the bus is free.
This CAN controller communicates with a
microcontroller. The microcontroller steers and controls
the relevant CAN bus nodes.
A CAN Bus node can only transmit if the bus is free i.e. if
there is no communication taking place with other nodes.
Access to the CAN BUS is fixed in the CAN protocol
(identifier). This results in differing priorities among the
individual CAN bus nodes.
Communication and Control
CAN Bus CAN Bus Protocol
89 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
4.3.2.2 CAN Bus Arbitration [ ➙ 89]
CAN Bus Protocol
4.3.2 CAN Bus Protocol
CAN Bus Protocol
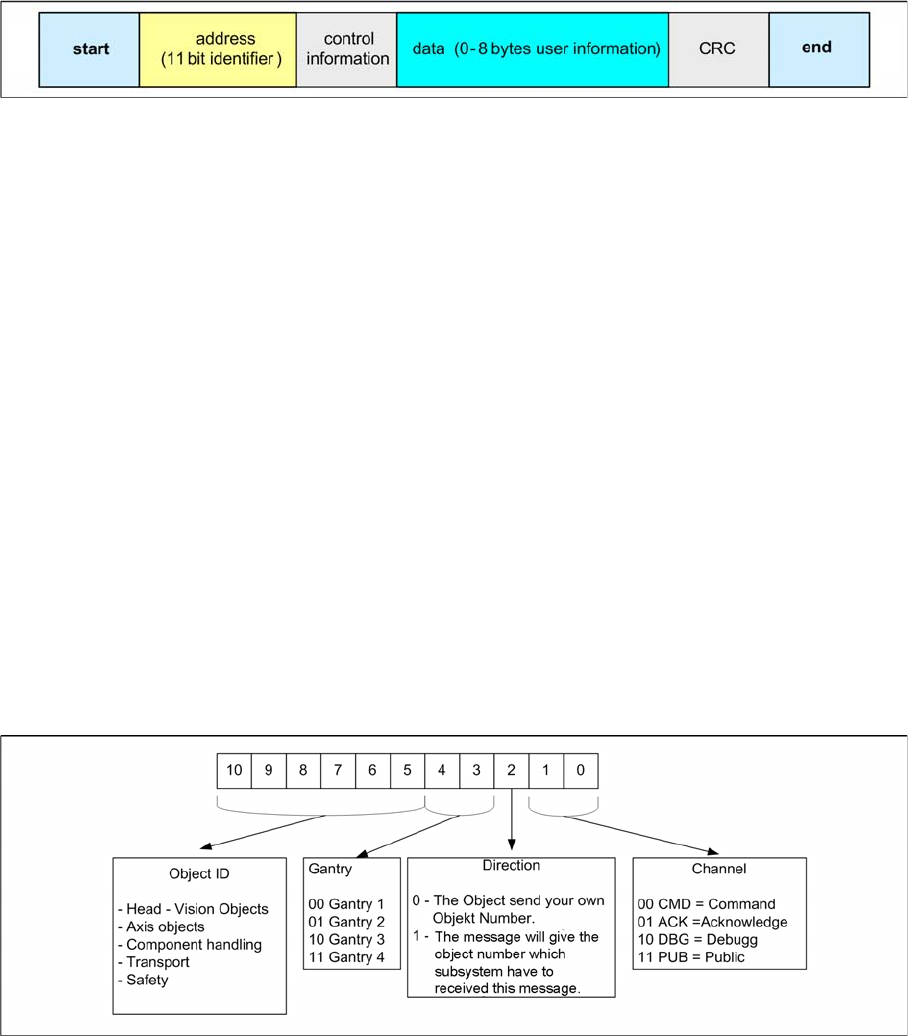
▪ Start
This bit indicates the beginning of a telegram and is a dominant bit. After this bit is set, no other user
of the CAN bus is able to send.
▪ Address field (11 bit identifier)
The 11 bit address identifier value determines the bus access. The lower value has the highest
priority.
▪ Control field
The 4 lowest bits in the 6 bit field show the data length of the following data field in bytes (DLC: Data
Length Code.
▪ Data field
Contains the information actually required and can be from 0 byte to 8 byte. The transfer of a byte
begins with the most significant bit (the bit with the highest value).
▪ Data control field CRC
Consists of a 15 bit check sequence (CRC sequence + CRC delimiter = CRC Field - Cyclic
Redundancy Check) and a recessive delimiter bit. The redundant information in the control
sequence allows the receiver to check whether the message received has been falsified by
interference.
▪ End
Each data telegram is terminated by a sequence of 7 recessive bits.
11 Bit Iden tifier
4.3.2.1 11 Bit Identifier
11 Bit Identifier
The CAN bus system is using the 11 Bit identifier for addressing the different CAN objects
An 11 Bit identifier (address) identifies the type, priority, source and /or target of the message.
This identifier also controls the bus access (arbitration).
CAN Bus Arbitration
4.3.2.2 CAN Bus Arbitration
Arbitration (arbitration means decision)
Communication and Control
CAN Bus Protocol CAN Bus
Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 90
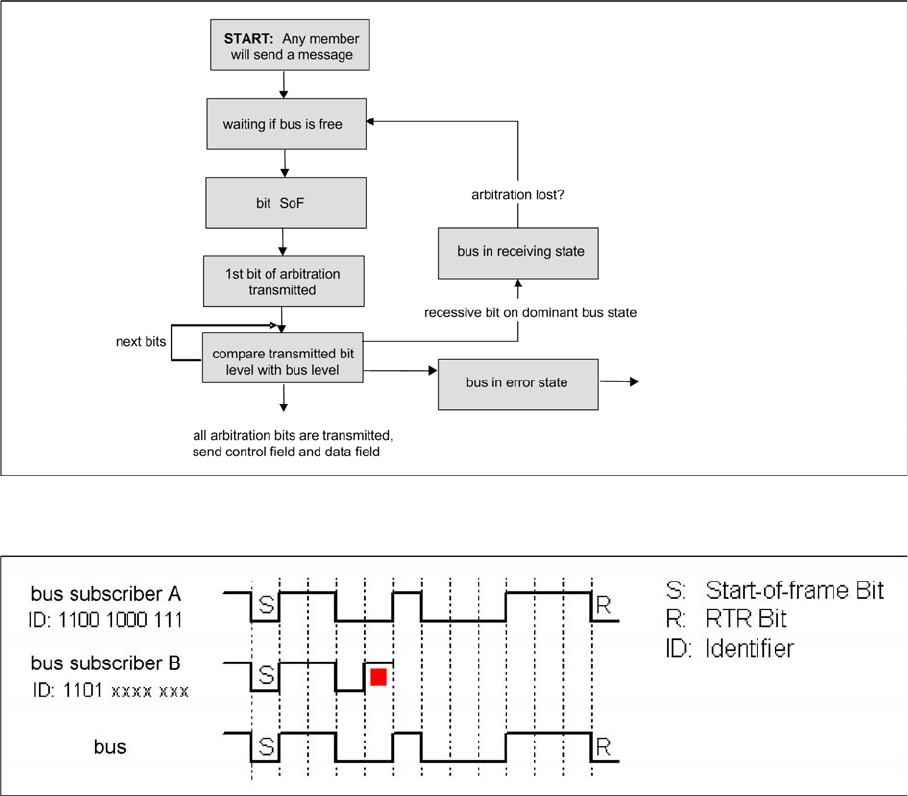
In CAN networks, there is no addressing of subscribers or stations in the conventional sense, but
instead, prioritized messages are transmitted. Whenever the bus is free, any unit may start to transmit a
message. In general, a subscriber can only occupy the bus if this is free. The bus subscriber can detect
the bus occupation state by analyzing a certain time period within which the bus must be inactive.
When multiple nodes begin to send a message at the same time, a selection phase (arbitration phase)
is used to decide which node may remain on the bus.
Bus access conflicts are resolved by including a message arbitration field (as a default the 11 bit
identifier is used).
The basis of bit-wise arbitration is the differentiation of 2 physical bus levels, a dominant one (low) and
a recessive bit (high).
A free bus is always on the recessive level. A DATA FRAME prevails over the REMOTE FRAME. During
arbitration every transmitter compares the level of the bit transmitted with the level that is monitored on
the bus. If these levels are equal the unit may continue to send.
When a recessive level is sent and a dominant level is monitored, the unit has lost arbitration and must
withdraw without sending one more bit. At the end of arbitration, the only subscriber left on the bus is the
one whose message has the lowest identifier value (logical zero is a dominant level). The lower the
identifier value is, the higher the priority of a message is.
When the bus is free any unit may start to transmit a message. The message sent by this subscriber is
not destroyed here i.e. it is a loss-free arbitration.
Flow chart bus arbitration
The following example shows arbitration by bit-wise scanning of the identifier by the 2 subscribers.
CAN bus arbitration example