00194614-08 Trainingsdoku. SG X-Serie_X4i SW70x (AL2)_EN.pdf - 第288页
Collect, Pick and Place Head (CPP) DP Axes Reference Run Reference Run C PP Head Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 288 DP Axes Reference Run 8.3.3 DP Axes Reference Run ▪ In the reference run for the st a…
Collect, Pick and Place Head (CPP)
Reference Run CPP Head Reference Run Z Axis
287 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
Reference Run Z Axis
8.3.1 Reference Run Z Axis
Star Axis Reference Run
8.3.2 Star Axis Reference Run
Preparing the Z axis before the reference run (CPP)
Legend
A : Vacuum measurement hold circuit
B : Vacuum measurement placement circuit
The Z axis retract unit ensures that the Z axis is in a safe
position (Z up) as soon as the machine is started. This is
the requirement for starting the Z axis reference run.
NOTICE! The zero point correction in the Z axis
EEPROM needs to be identical with the value in the
machine data.From SW 702 this value is automatically
copied to the machine data when the head is changed.
The Z axis travels down to the zero pulse of the
incremental encoder. After reaching the zero pulse, the
zero point correction is loaded.
The Z axis travels to the zero point correction value and
the position counter is set to 0 digits.
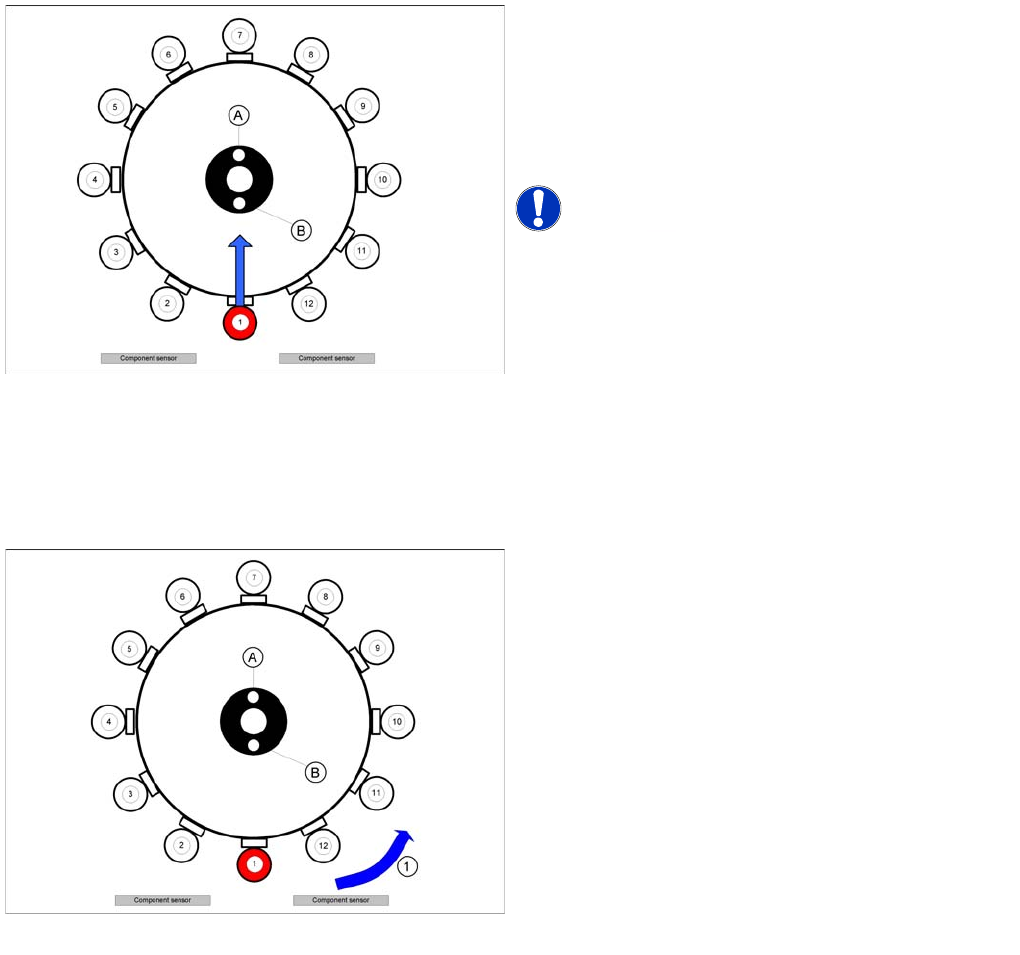
Star axis reference run
Legend
1. Direction of rotation
A : Vacuum measurement hold circuit
B : Vacuum measurement placement circuit
The star axis rotates in an anticlockwise direction (1) to
the zero pulse of the incremental encoder. After reaching
the zero pulse, the zero point correction is loaded. The
star axis continues to rotate around the zero point
correction value and sets the position counter to 0 digits.
Segment number 1 is now in pickup / placement position.
Collect, Pick and Place Head (CPP)
DP Axes Reference Run Reference Run CPP Head
Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 288
DP Axes Reference Run
8.3.3 DP Axes Reference Run
▪ In the reference run for the star axis, the DP drives rotate the segments into the 0° position.
▪ The DP drives rotate in a clockwise direction, to the zero pulse of the incremental encoder. After the
zero pulse has been reached, the zero point correction value is loaded. The DP axis continues to
rotate around the zero point correction value and sets the position counter to 0 digits.
Reference run of CPP head finished!
The gantry reference run follows – see Chapter Gantry
Height R eference Run
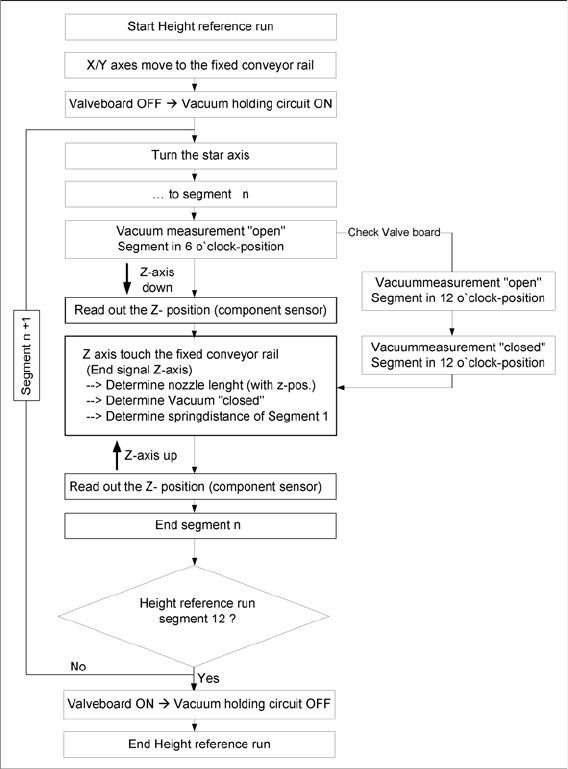
8.3.4 Height Reference Run
With this function we check the correct fitting of the nozzle on the sleeve and that the correct nozzle type
like the programmed one are set to the sleeves. The nozzle length is taken to calculate the pick up and
placement height for the subsequent placements.
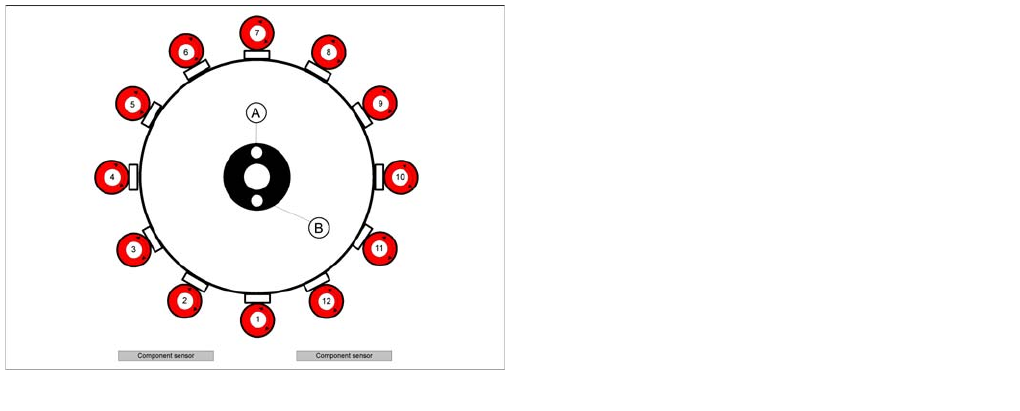
DP axis reference run
Legend
A : Vacuum measurement hold circuit
B : Vacuum measurement placement circuit
The DP axis rotates the nozzle into the correct pickup
angle and placement angle. After component recognition
has been performed, the DP axis turns the components
into the correct placement angles and the determined
correction angle from the vision system.
Collect, Pick and Place Head (CPP)
Reference Run CPP Head Height Reference Run
289 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
▪ The gantry moves the placement head to the fixed conveyor side at height measurement position.
▪ The star turns the segment for measuring into the pickup/placement position
▪ The value Open vacuum is measured for the relevant segment.
The Z axis is positioned downwards:
▪ When the component sensor beam is interrupted, the Z position of the axis is determined for the
component sensor.
▪ When the Z axis touches the conveyor side, the mechanical nozzle length is determined by the Z
position value and the closed vacuum value is measured.
The Z axis is positioned upwards:
▪ When the component sensor beam is no longer interrupted, the Z position of the axis will be
measured again for the component sensor.
▪ During each star rotation the valve terminal and the holding circuit are checked with open and closed
nozzle in the 12 position.