00194614-08 Trainingsdoku. SG X-Serie_X4i SW70x (AL2)_EN.pdf - 第286页
Collect, Pick and Place Head (CPP) Vacuum System Reference Run CPP Head Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 286 Reference Run CPP Head 8.3 Reference Run CPP Head Reference r un CPP head Description The CPP …
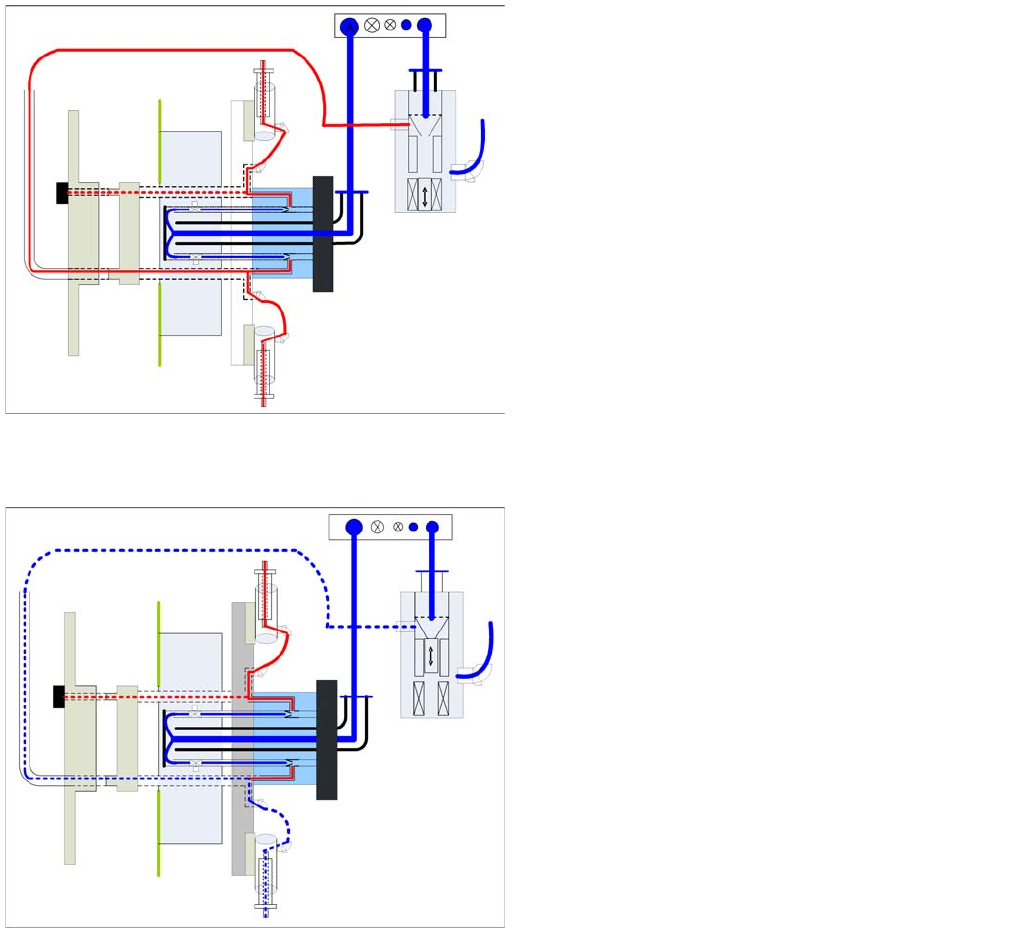
Collect, Pick and Place Head (CPP)
Overview Vacuum System
285 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
Picking Up Components
8.2.8.2 Picking Up Components
Placing Components
8.2.8.3 Placing Components
Before the star rotates into the pickup position, the
relevant valve is switched on via the valve terminal.
Vacuum from the holding circuit is now present at the
nozzle.
Once the star has reached the pickup position, the
holding circuit vacuum is strengthened via the pressure
control valve and the component can be picked up.
▪ After the component has been picked up, the
component is held on the nozzle with the help of the
vacuum from the holding circuit.
▪ If the star is in the placement position and the Z down
sensor is enabled, the pressure control valve will
switch over to air bast. This eliminates the holding
circuit vacuum and an air blast of approx. 200 mbar is
present at the nozzle.
▪ The switch on time for max. vacuum/air blast
depends on the settings programmed in the
programming system.
▪ Once the Z axis has reached the top position, the star
continues to turn. The relevant valve is now closed on
the valve terminal. This saves compressed air!
Collect, Pick and Place Head (CPP)
Vacuum System Reference Run CPP Head
Student Guide SIPLACE X-Serie and X4I SW70x (AL2) 286
Reference Run CPP Head
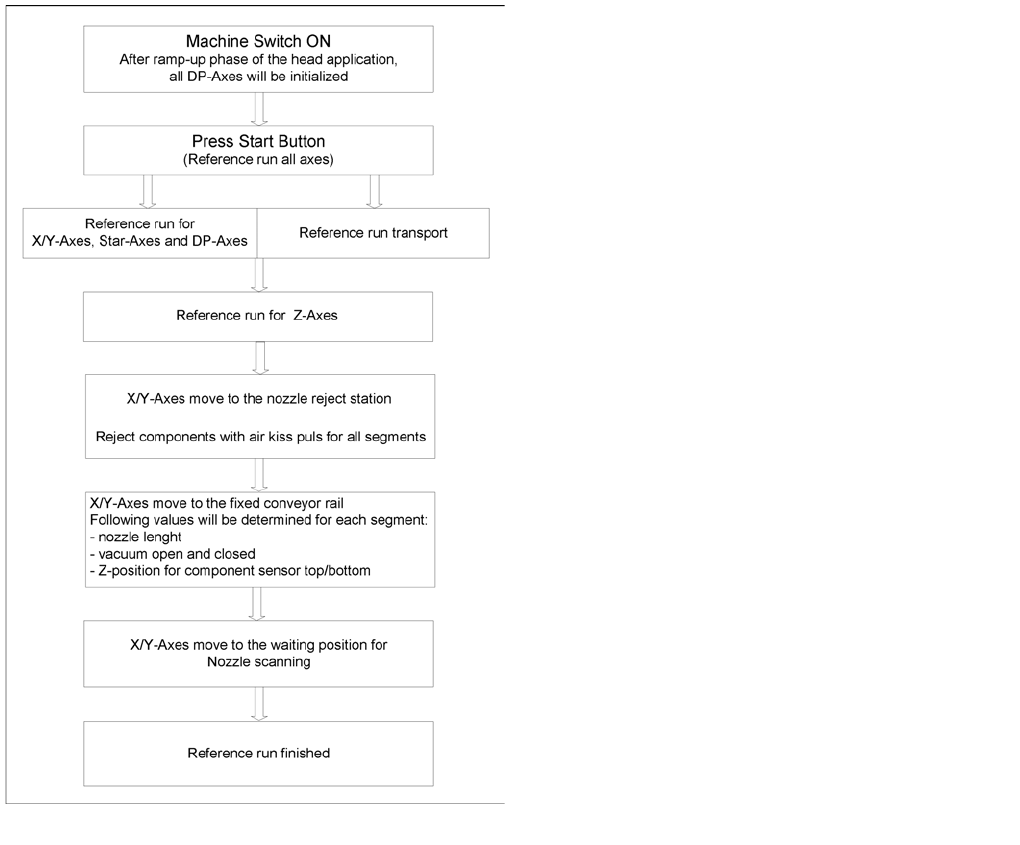
8.3 Reference Run CPP Head
Reference run CPP head
Description
The CPP head has a Z axis, a star axis and twelve
independent DP axes. All these axes need to be
initialized before placement begins. This ensures that the
control system knows where their actual mechanical
position is.
When the software is started, the embedded software
checks all subsystems and sends the result to the
superior control software.
The reference run is started by pressing the start button
(see adjacent flow diagram). The processes have been
optimized as far as possible and can run parallel to one
another (star and DP axes plus initialization of conveyor).
Collect, Pick and Place Head (CPP)
Reference Run CPP Head Reference Run Z Axis
287 Student Guide SIPLACE X-Serie and X4I SW70x (AL2)
Reference Run Z Axis
8.3.1 Reference Run Z Axis
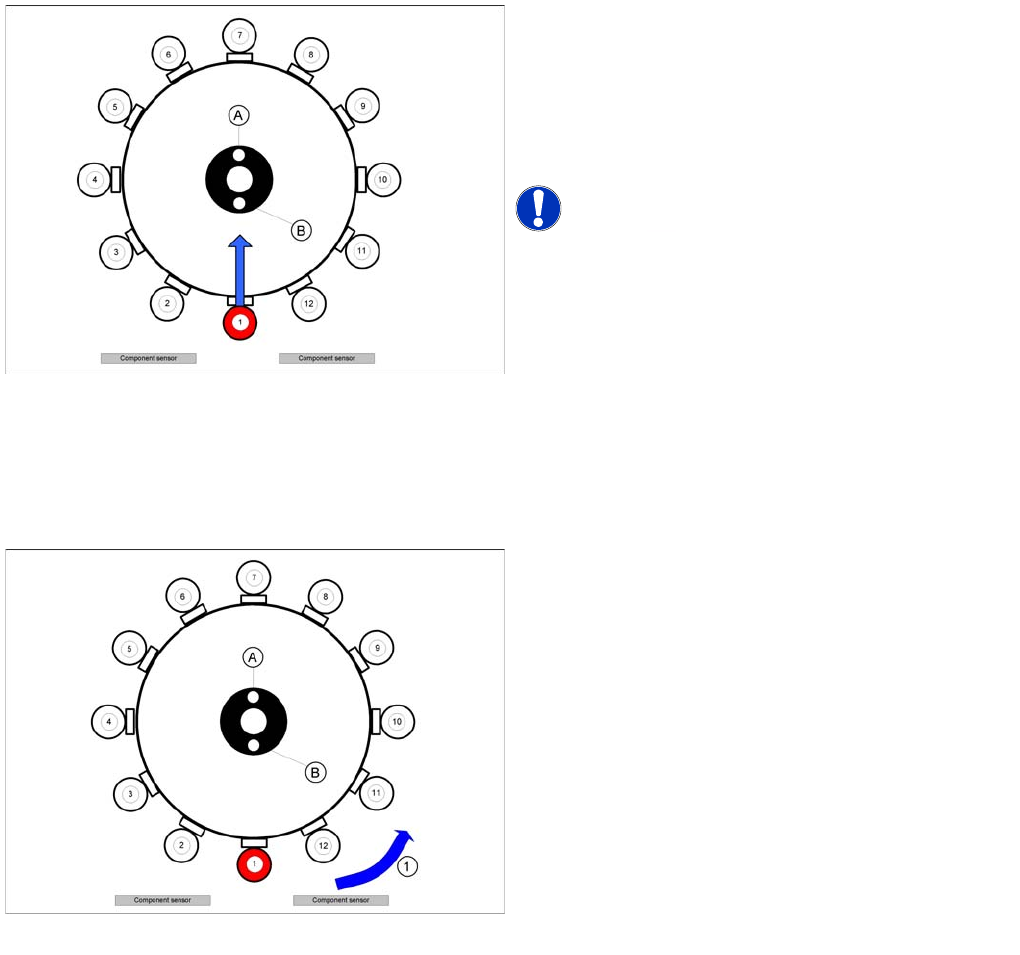
Star Axis Reference Run
8.3.2 Star Axis Reference Run
Preparing the Z axis before the reference run (CPP)
Legend
A : Vacuum measurement hold circuit
B : Vacuum measurement placement circuit
The Z axis retract unit ensures that the Z axis is in a safe
position (Z up) as soon as the machine is started. This is
the requirement for starting the Z axis reference run.
NOTICE! The zero point correction in the Z axis
EEPROM needs to be identical with the value in the
machine data.From SW 702 this value is automatically
copied to the machine data when the head is changed.
The Z axis travels down to the zero pulse of the
incremental encoder. After reaching the zero pulse, the
zero point correction is loaded.
The Z axis travels to the zero point correction value and
the position counter is set to 0 digits.
Star axis reference run
Legend
1. Direction of rotation
A : Vacuum measurement hold circuit
B : Vacuum measurement placement circuit
The star axis rotates in an anticlockwise direction (1) to
the zero pulse of the incremental encoder. After reaching
the zero pulse, the zero point correction is loaded. The
star axis continues to rotate around the zero point
correction value and sets the position counter to 0 digits.
Segment number 1 is now in pickup / placement position.