YSM20R_YSM20WR_Ope_E.pdf - 第129页
2-26 2 Basic operation 3.3 Vision T he recognized image area on the screen shows the image when the machine recognizes a board mark, bad mark or component during the automatic operation. Howev er , the area shows only th…

2-25
2
Basic operation
• Working Ratio
This is the machine's independent working ratio that is not affected by the status of the upstream and downstream
machines. The following expression calculates the working ratio.
Cumulative mounting time + cumulative transfer time
(Production completion time - setup completion time) - cumulative standby time
×
100
Working ratio (%)
=
• Cumulative mounting time : Total time that head unit is operating
• Cumulative transfer time : Total transfer time (board loading/unloading)
• Cumulative standby time : Total standby time due to upstream or downstream machine
• Production completion time : Time changed to next production board
• Setup completion time : Time [START] button was pressed and operation started
• Error Stop Time
Shows the machine stop time by error. This is a period of time until the [CLEAR] button is pressed from the error
occurrence.
• [Reset] button
This resets the production control information of the production data. It resets each piece of data displayed on the screen,
current production quantity and scheduled production quantity. The "Board Counter" value on the Setup screen is also
reset when this production data is reset.
2-26
2
Basic operation
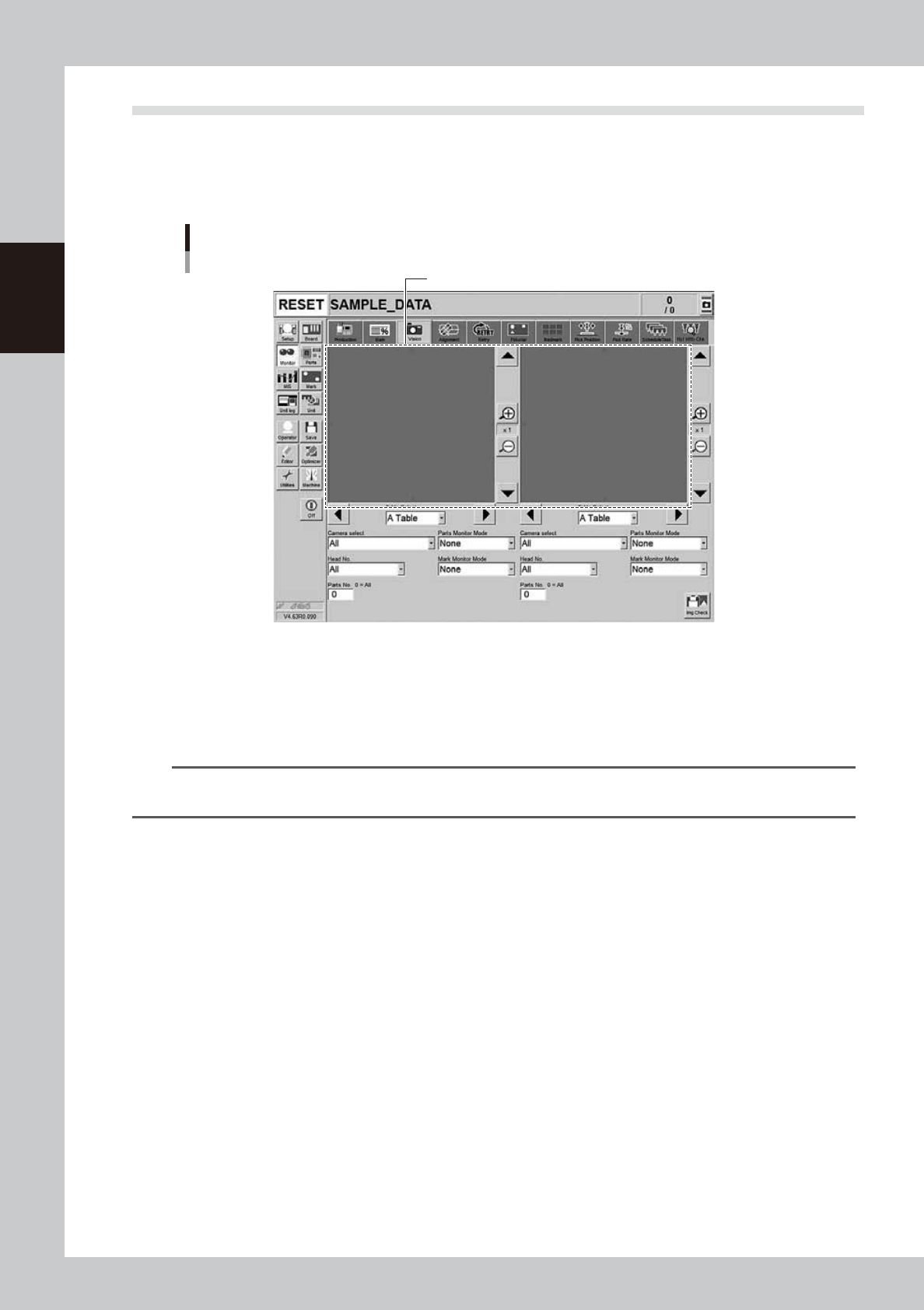
3.3 Vision
The recognized image area on the screen shows the image when the machine recognizes a board mark, bad
mark or component during the automatic operation. However, the area shows only the image of the lastly
recognized component when the high speed, continuous component recognition are performed such as by the
multi camera.
Recognition image display
Monitor: Vision
24214-KMK-00
• Table select/ Camera select / Head No.
A desired head unit, a camera number and a head number can be selected.
• Parts number
Inputting a desired part number makes the list display only its part image. Inputting "0" shows all the part images.
n
NOTE
An image is displayed on each left and right of the vision monitor. Select a table, a camera, a head and a part
number for each monitor so that the images can be compared with each other.
• Enlarge/reduce buttons
The recognition result image can be enlarged from 1 to 16 times by pressing the enlarge (+) button. The image can be
reduced to 1/16 by pressing the reduce (-) button. Note that when the image is enlarged, the smooth component edges
may appear jagged, and when reduced, gray sections may appear around the edges. But this is not a fault.
• Up/down/left/right buttons
The arrow buttons on the upper right and lower right corners of the image screen move the image vertically. The arrow
buttons on the lower left and lower right of the image screen move the image left to right or right to left. Use these arrow
buttons to view a section of the image that is not displayed on the screen.
• Parts Monitor Mode
This specifies the mode for displaying the components on the monitor during vision recognition. Depending on the
selected item, the recognition results and detection range window will appear on the image. This monitor mode can also
be changed during operation.
"None"
Displays the image taken by the camera. The recognition result values are not displayed.
"Vision Result"
Displays information such as the recognition results X, Y and R direction position (pixels) and number of detection
leads. Note that the displayed items will differ according to the component recognition type.
"Detection Range"
Draws a window for the component detection range. If the component does not fit within the detection range, it will
not be recognized correctly. In this case, check the pickup state or correct the component data.

2-27
2
Basic operation
"Datum Pos."
Displays a cross cursor indicating the position used as a reference for detecting the lead or component edge.
"Find Line"
Displays the line used for component detection, on a chip component or on the component leads. If the detection line
position is incorrect, adjust the Vision parameters.
"Edge Pos."
Displays a cross cursor at the lead or component edge position.
"Last Pos."
Displays a cross cursor at the center of the component.
"Binary Image"
The component is displayed as a binary image.
• Mark monitor mode
This specifies the monitor display mode during mark recognition. The recognition results and binary image will appear
on the image according to the selected item. This monitor mode can be changed during operation.
"None"
Displays an image taken by the camera. The recognition result values are not displayed.
"Result"
Displays the center position coordinates (pixels) of the detected mark.
"Binary Image"
Displays the image taken by the camera as a binary image.
"Grey Image"
Displays an image that was processed after being captured by the camera. The recognition result values are not
displayed.
"Search Result"
Draws a line to indicate the boundary between the recognized mark and the background.
"Datum Circle"
Draws a mark of the specified diameter from the center of the detected mark. (Possible only in specific recognition
modes.)
"Tangent Circle"
Draws an inscribed circle and circumscribed circle from the center of the detected mark. (Possible only in specific
recognition modes.)
"Error Image"
Displays the error image. (Possible only in specific recognition modes.)
"Individual data"
Displays the individual data when multiple objects are detected. (Possible only in specific recognition modes.)
• [Img Check] button
Pressing the [Img check] button calls up the “Vision Check and Save” screen.
The recognized image just before the machine stops due to an error can be checked and saved.
(See Surface Mounter (SMT) Programming Manual, chapter 4, "5. Recognition image check and save function” for more
details.)