EUKYX-199-3100_G5S2_Instruction_Vol3_E.pdf - 第194页
EUKYX 2-46 199-3100 2.8 PCB Recog 2.8 PCB Recog Pressi ng the [P CB Recog] but ton on the "Of fs et Data " win dow di spl ays the fol lowi ng wi nd ow . [1] [2] [4] [3] Graphic Development F3B59 Set the fol low…
EUKYX
2-45199-3100
2.7 Nozzle Stocker
2.7.1 1-1 to 1-4, 2-1 to 2-4
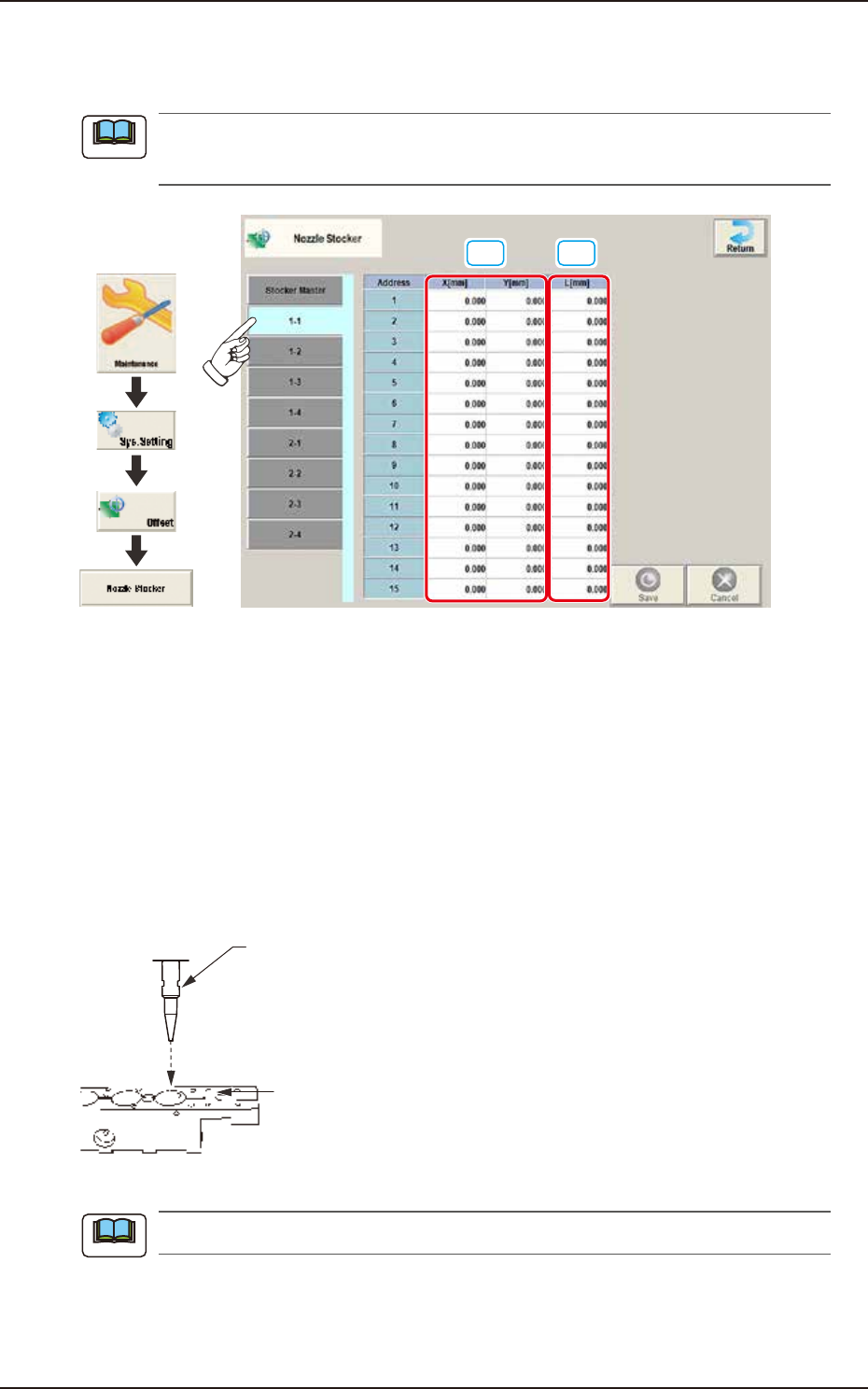
Pressing the [1-1] tab on the "Nozzle Stocker" window displays the following window.
(a) The same tab sheet appears from [1-2] to [2-4].
(b) The tab sheet may look different, depending on which options are selected.
[1]
[2]
Graphic
Development
F3B57
[1] X (Horizontal) / Y (Vertical) [mm]
This offset data is used to adjust the nozzle change position deviation from the nozzle stocker unit
position designed value based on the PCB locating base XY coordinates (Machine Reference XY
Coordinates: Origin P0).
The Machine Reference XL Coordinates are set to the reference values.
When positive (+) value is set for the offset value, the nozzle change position is changed to
directions X(+) and Y(+).
[2] L (Height) [mm]
When a value is entered with a plus (+) sign, the nozzle change position (height) is changed in the L
(+) direction, concluding that the descending stroke has increased.
Nozzle
Nozzle Mounting Level
(Upper Surface of Nozzle Stocker Block)
L(+)
F3B58
The above "L" is effective only in the master nozzle.
Note
Note
EUKYX
2-46199-3100
2.8 PCB Recog
2.8 PCB Recog
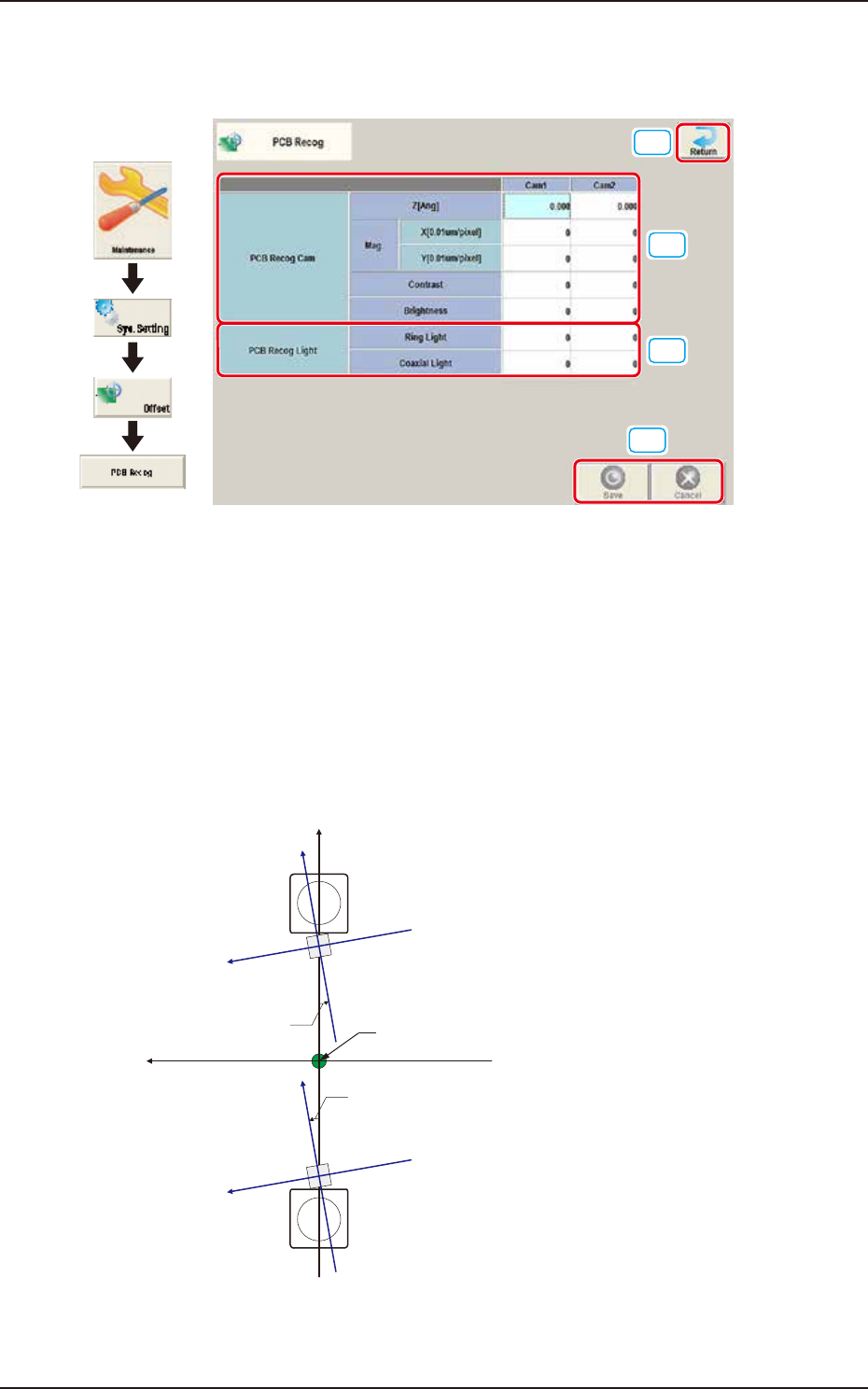
Pressing the [PCB Recog] button on the "Offset Data" window displays the following window.
[1]
[2]
[4]
[3]
Graphic
Development
F3B59
Set the following offset values for each camera.
[1] PCB Recog Cam
The set parameters are used to adjust the horizontal tilt of PEC recognition camera.
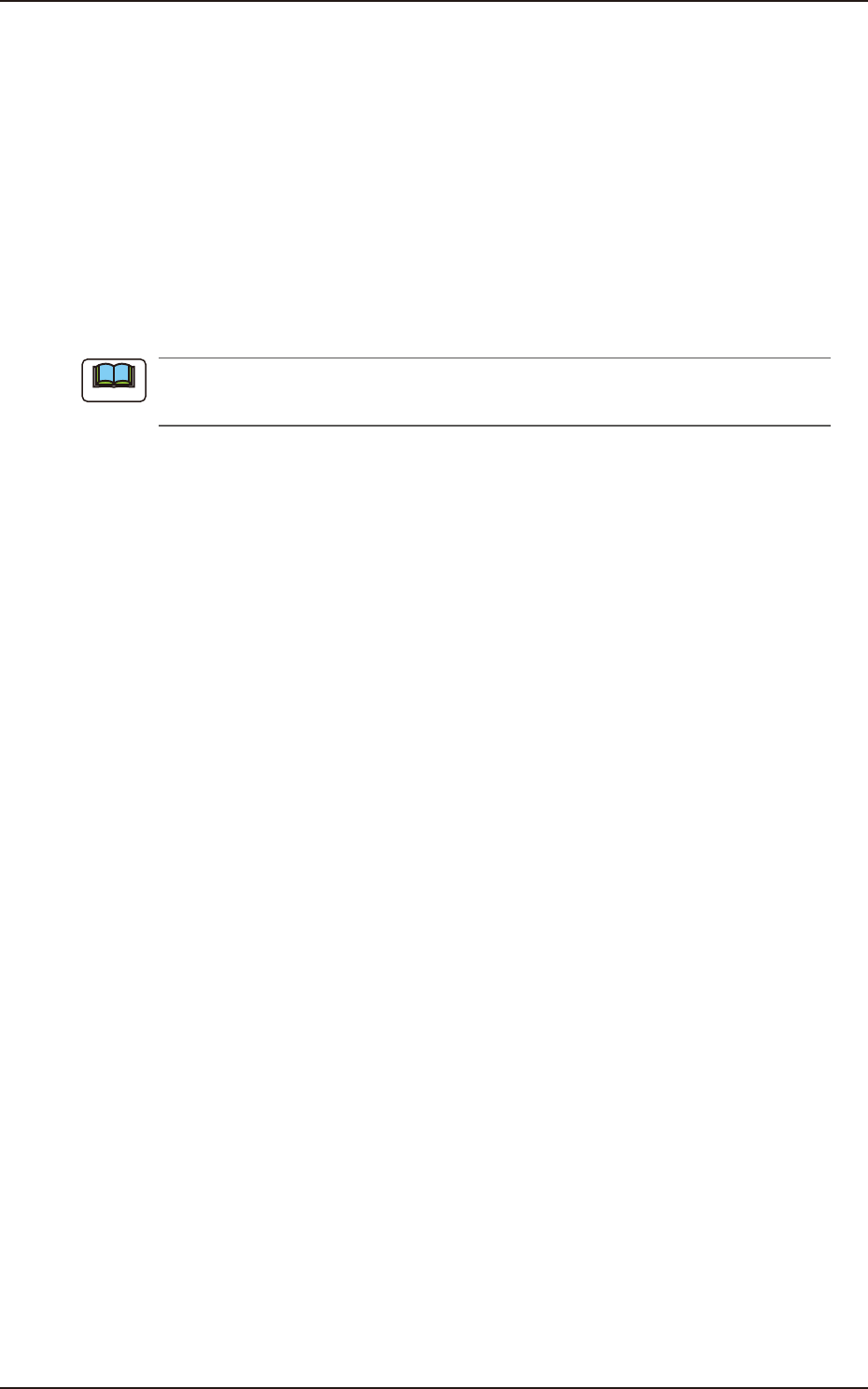
Z (Angle) [deg]
Set the parameters representing the angular deviations in the scanning coordinates of the
PEC recognition cameras based on the machine reference X/Y coordinates (Xm-Ym). When
the camera scanning coordinates are shifted counterclockwise to the machine reference X/Y
coordinate system, a plus sign must be affixed to each offset data.
Xm(+)
Ym(+)
Yc(+)
Xc(+)
Yc(+)
Xc(+)
Angle of PEC Recognition Camera
Xm-Ym
Xc-Yc
Angle of PEC Recognition Camera
Pm. Machine Reference
Coordinate Origin
: Machine Reference
Coordinate System
: PEC Recognition
Coordinate System
F3B60
EUKYX
2-47199-3100
2.8 PCB Recog
Mag. X (Horizontal) and Y (Vertical) [0.01 µm/pixel]
Set how many micrometers should be equivalent to one pixel to specify the magnification of the
PEC recognition camera.
The parameters are automatically calculated through teaching operations performed using the
magnification measurement jig.
• Default : 2500
Contrast and Brightness
The brightness of the image captured by the PEC recognition camera can be adjusted.
• Defaults
Contrast : 102
Brightness : 128
(a) The larger the value for "Contrast" is, the stronger the chromaticness becomes.
(b) The larger the value for "Brightness" is, the brighter the whole view becomes.
[2] PCB Recog Light
Ring Light, Coaxial Light
Set the light level for PCB Recog Light.
• Defaults
Ring Light : 20
Coaxial Light : 30
[3] [Return] button
When this button is pressed, the window returns to the “Offset Data” window.
[4] [Save] button
When this button is pressed, the input data is saved.
[Cancel] button
When this button is pressed the input data is cancelled and the window returns to the saved data.
Note