PathMaster-REV-L-4.5-1.pdf - 第142页
Machine Operati on Manual Revision L / February 2020 Page 142 of 20 0 O ff set Select Modify - > Offse t to see the opti ons Prog ram and Selection . Offsetting a Path 1. Select Modify - > Offse t. 2. Select ei the…

Machine Operation Manual
Revision L /
February 2020
Page 141 of 200
Modify
PathMaster® has functions to help change completed paths. These functions can be found
in the Modify menu.
Program
Select this option to offset or mirror the entire program.
Selection
Select this option to make changes to only the blue highlighted portion of the program.
Properties
Select
Modify -> Properties
to open the selected commands edit window. Refer to Section
10 for more information on specific programming functions.
Machine Operation Manual
Revision L /
February 2020
Page 142 of 200
Offset
Select
Modify -> Offset
to see the options
Program
and
Selection
.
Offsetting a Path
1. Select
Modify -> Offset.
2. Select either
Program
or
Selection.
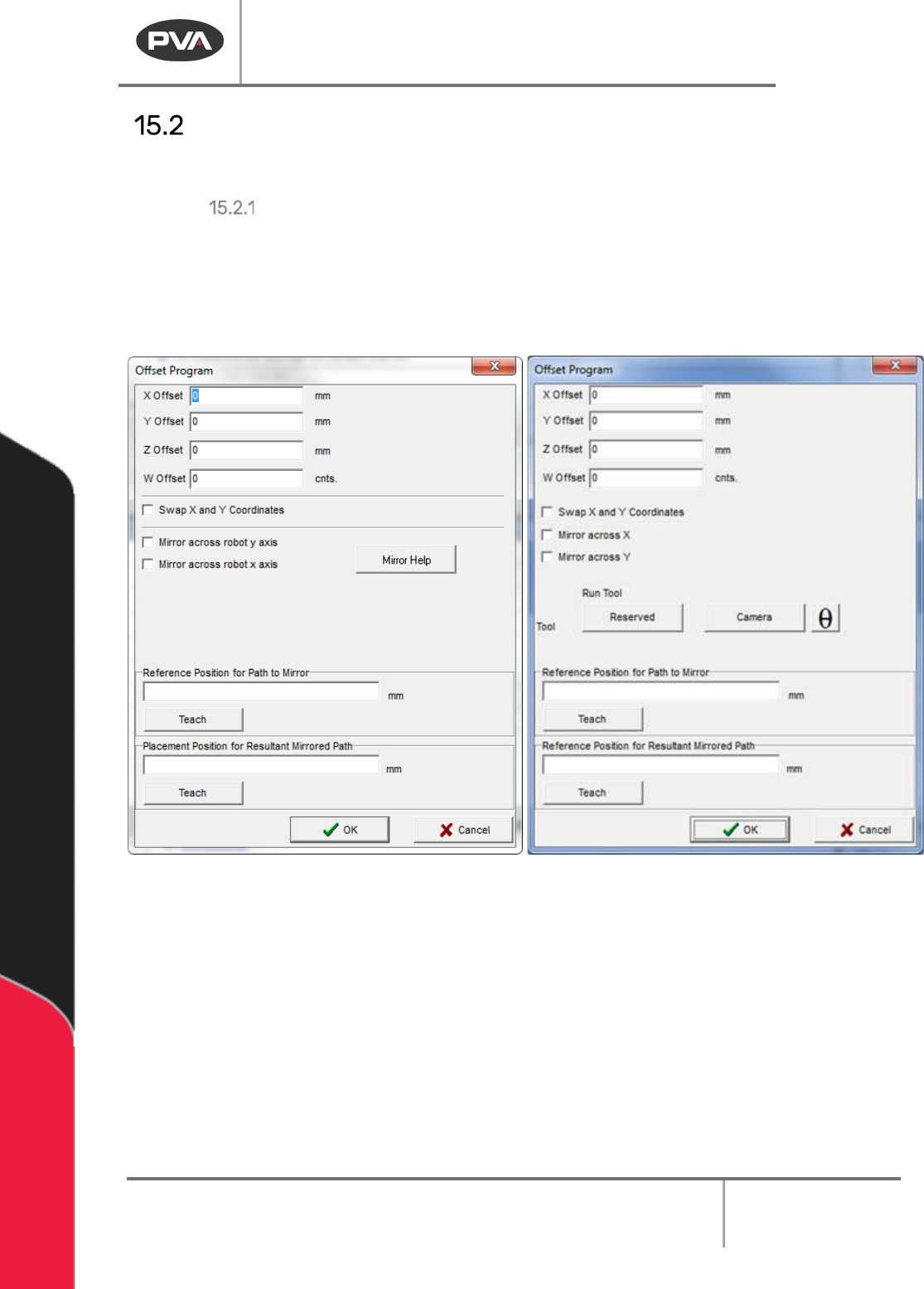
3. In the boxes for ‘X Offset’, ‘Y Offset’, ‘Z Offset’, and ‘W Offset’, enter the desired
offset in the units shown.
Figure 175: Offset Program Window Without and With Teach Tool Enabled
4. Click ‘OK’.
Your program/selection has been correctly offset.
NOTE: If you Offset W you could cause unintended consequences, and will override existing
offsets when the teach tool is enabled. Re-teaching a selected command will reset the W
to the pre-taught offsets.

Machine Operation Manual
Revision L /
February 2020
Page 143 of 200
Mirroring a Path
NOTE: It is not possible to mirror and offset a program simultaneously.
1. Select
Modify -> Offset.
2. Select either
Program
or
Selection.
3. Select ‘Mirror across robot y axis’ and/or ‘Mirror across robot y axis’. See ‘Mirror
Help’ for an image and description of each action.
Figure 176: Mirror Help Window
4. Move the robot to the necessary reference point for the path. This point is used to
group the selected path components and will also act as the reflection point.
5. Click the first “Teach” button.
6. Move the robot to the new location. This location will be used as the origin of the
location, based on the first reference point select.
7. Click the second “Teach” button.
8. Click “OK”.
Your program/selection is now mirrored.
NOTE: This will only mirror the X and Y axes and will not affect the Z or W axes.