2OM-1075-002.pdf - 第57页
(2) Front Lighting Recognition System The figure shows the sectional view of the recognition unit and the flow of the recognition light in the front lighting recognition sys- tem. Select the proper lighting system, using…
• Principle of Recognition
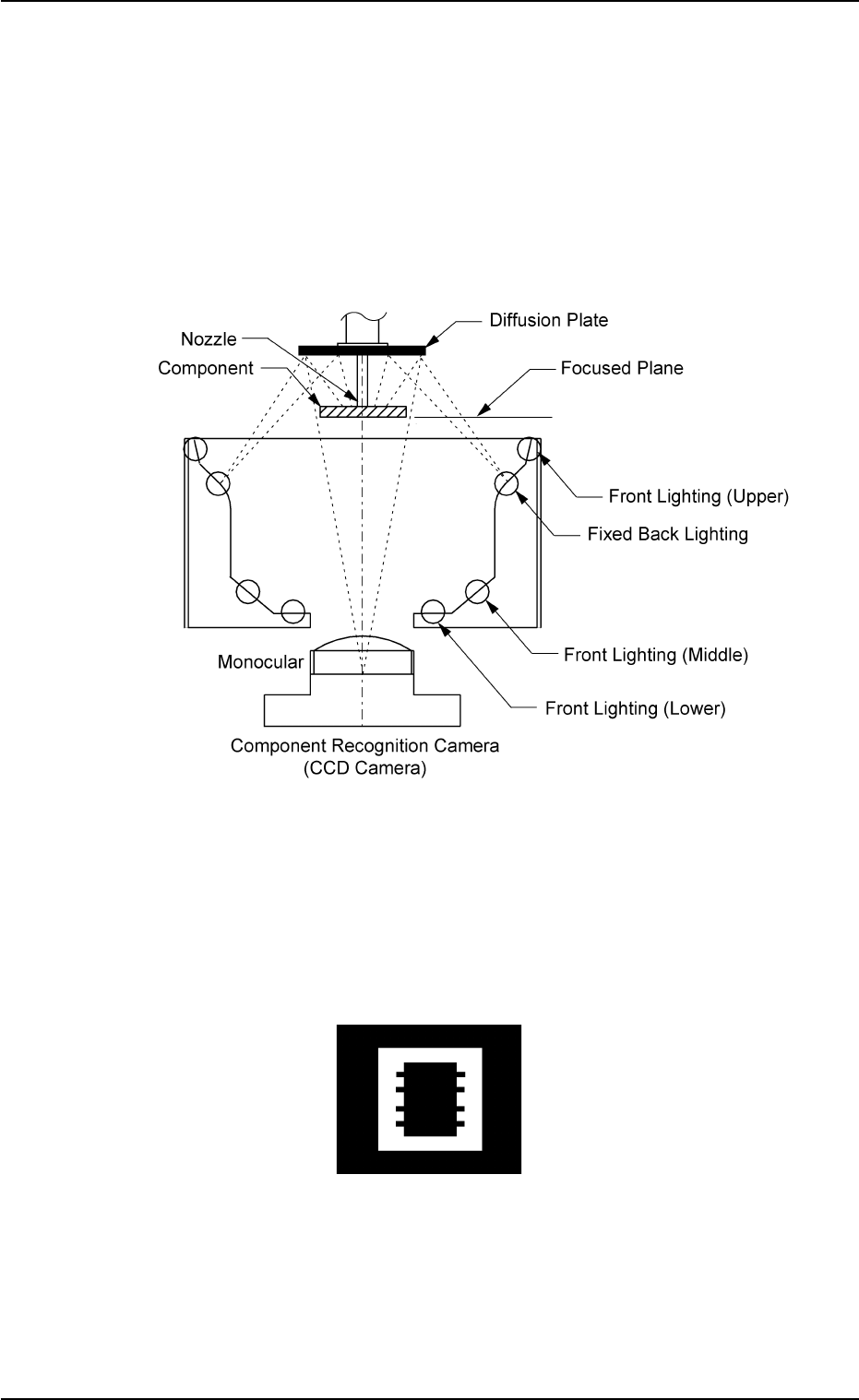
(1) Back Lighting Recognition System
The figure shows the sectional view of the recognition unit and
the flow of recognition light in the back lighting recognition sys-
tem.
• As for the component shown by the diagonal lines, the outline
is recognized through fixed back lighting.
Fig. 2B10
The light emitted from the back lighting lamp meets the diffusion plate
(assembled together with the nozzle) and reflects to the component. At
this time, the light which does not meet the component enters into the
CCD camera through the monocular. That is, the CCD camera cap-
tures the image of the outline of the component.
Fig. 2B11 Image on Recognition Monitor (Example)
0206-003 2 -7 AHB01ESPP
1.2 Component Placement (starting with preparation for component picks)
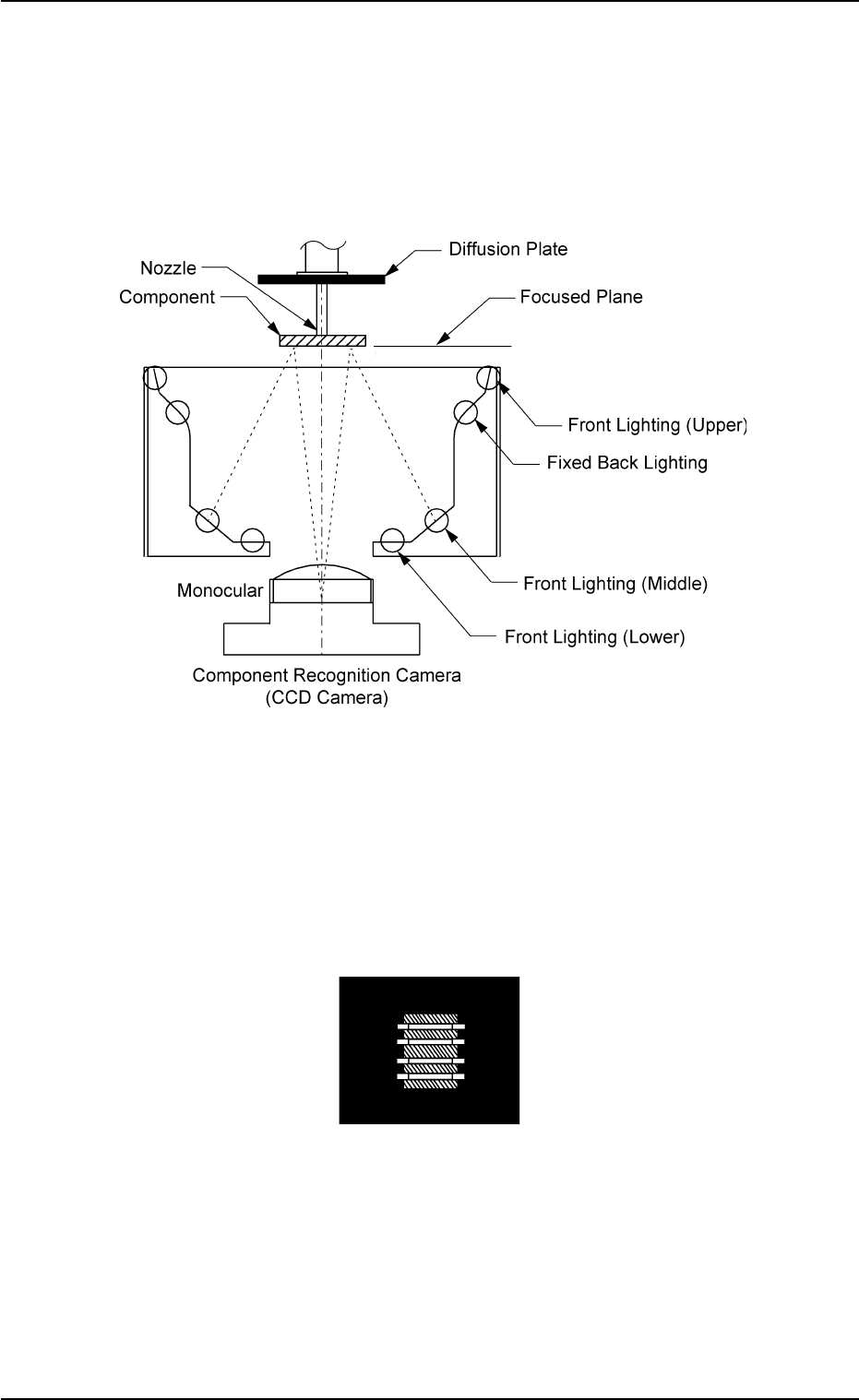
(2) Front Lighting Recognition System
The figure shows the sectional view of the recognition unit and
the flow of the recognition light in the front lighting recognition sys-
tem.
Select the proper lighting system, using the front lighting lamps
(upper, middle, and lower) for component recognition.
Fig. 2B12
The light emitted from the front lighting lamps (upper, middle, and lower)
meets the bottom of the component. The reflected light enters into the
CCD camera through the monocular.
That is, the CCD camera captures the image of the component leads,
etc.
Fig. 2B13 Image on Recognition Monitor (Example)
0206-003 2 -8 AHB01ESPP
1.2 Component Placement (starting with preparation for component picks)
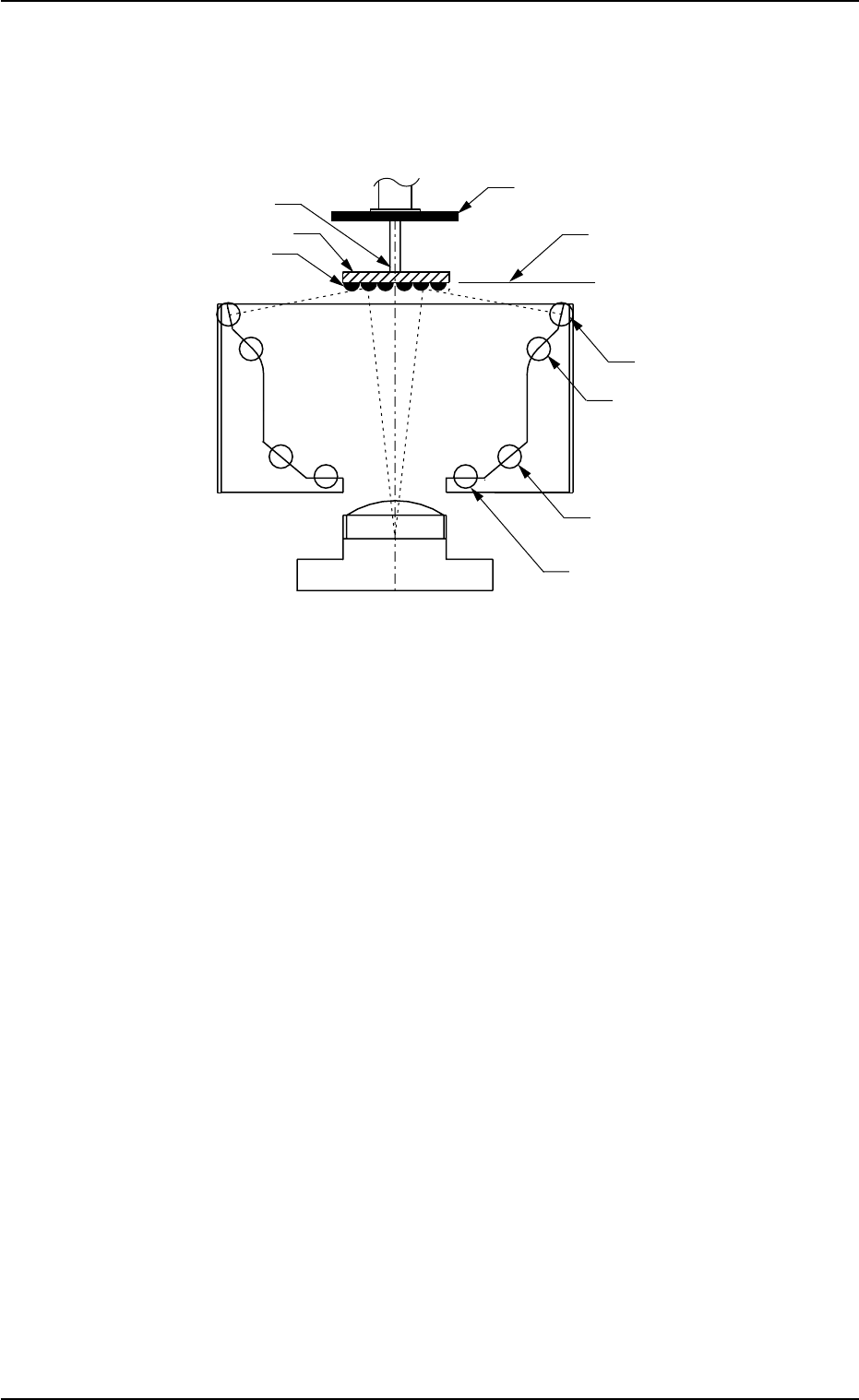
(3) Front Lighting Recognition System (For BGA Components)
The figure shows the sectional view of the recognition unit and
the flow of recognition light in the front lighting recognition
system (for BGA components).
Fig. 2B14
The light emitted from the front lighting (upper) reflects to the balls lo-
cated on the bottom of the BGA component.
The reflected light enters into the CCD camera through the monocular.
The captured images look like doughnuts.
That is, the CCD camera is used to detect where the BGA balls are or
whether or not the balls exist.
• Correction of Recognition
Theta (Angle) Correction
The picked component is adjusted to the angle (placement direction) of
placement specified in the pattern program by rotating the head.
At this time, the angular deviation (θ) detected through component rec-
ognition is also corrected.
0206-003 2 -9
AHB01ESPP
1.2 Component Placement (starting with preparation for component picks)
Ball
Front Lighting (Lower)
Front Lighting (Center)
Fixed Back Lighting
Component Recognition Camera
BGA Component
Nozzle
Diffusion Plate
Focused Plane
Front Lighting (Upper)
(CCD Camera)
Monocular