2OM-1075-002.pdf - 第65页
2 . 4 P .E.C. Recognition Function In normal cases, two fiducial marks are put on a P .C.B. and the coordi- nate data and positional deviation are detected by the P .E.C. recognition camera. This function automatically c…
2.3 Priority Sorting Function
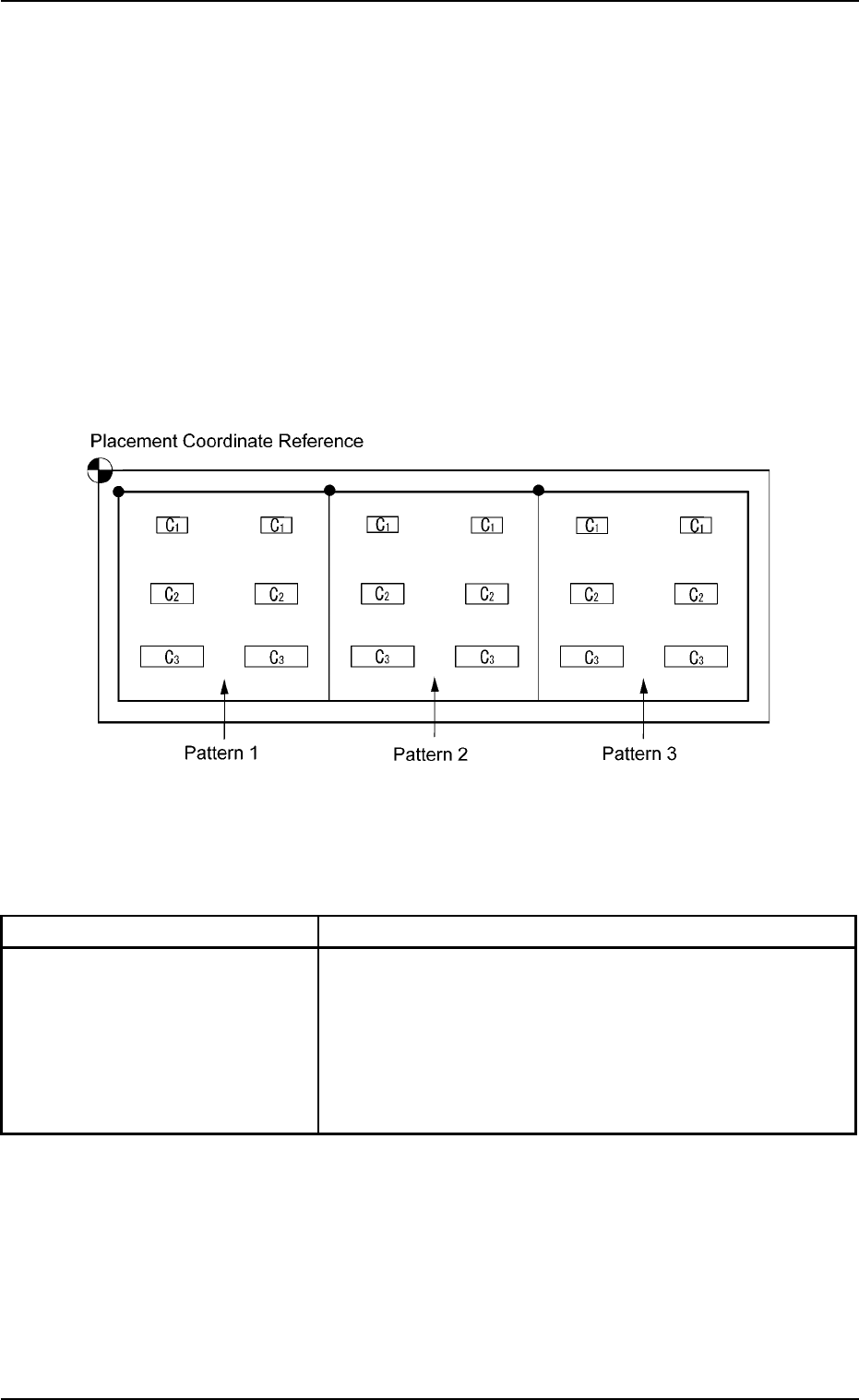
When components different in height are used in a repetitive pattern
program, this priority sorting function controls the machine to start its
placement operation with the shorter components than all the others on
all unit (child) boards of a multi-unit (mother) P.C.B., improving produc-
tivity.
In addition to that, the number of nozzle change operations can be re-
duced, avoiding deterioration of productivity because the components
that require the same nozzle are placed prior to all the other ones.
The example (figure) below shows that three kinds (C1, C2, and C3) of
components (different in height) are used.
Fig. 2B21
• How to use the priority sorting function
Table 2B3
Step Reference
1. Creating a Pattern Program
(1) "2.5 Placement Data" in "Section 2" of "Vol. 3: Program-
ming and Machine Data"
• C02_08C
(2) "3. Example of Pattern Program Creation" in "Section
2" of "Vol. 3: Programming and Machine Data"
• "3.6 Repetitive Patterns" (Priority Sorting Function)
0206-002 2-15 AHB01ESPP
2.3 Priority Sorting Function
2.4 P.E.C. Recognition Function
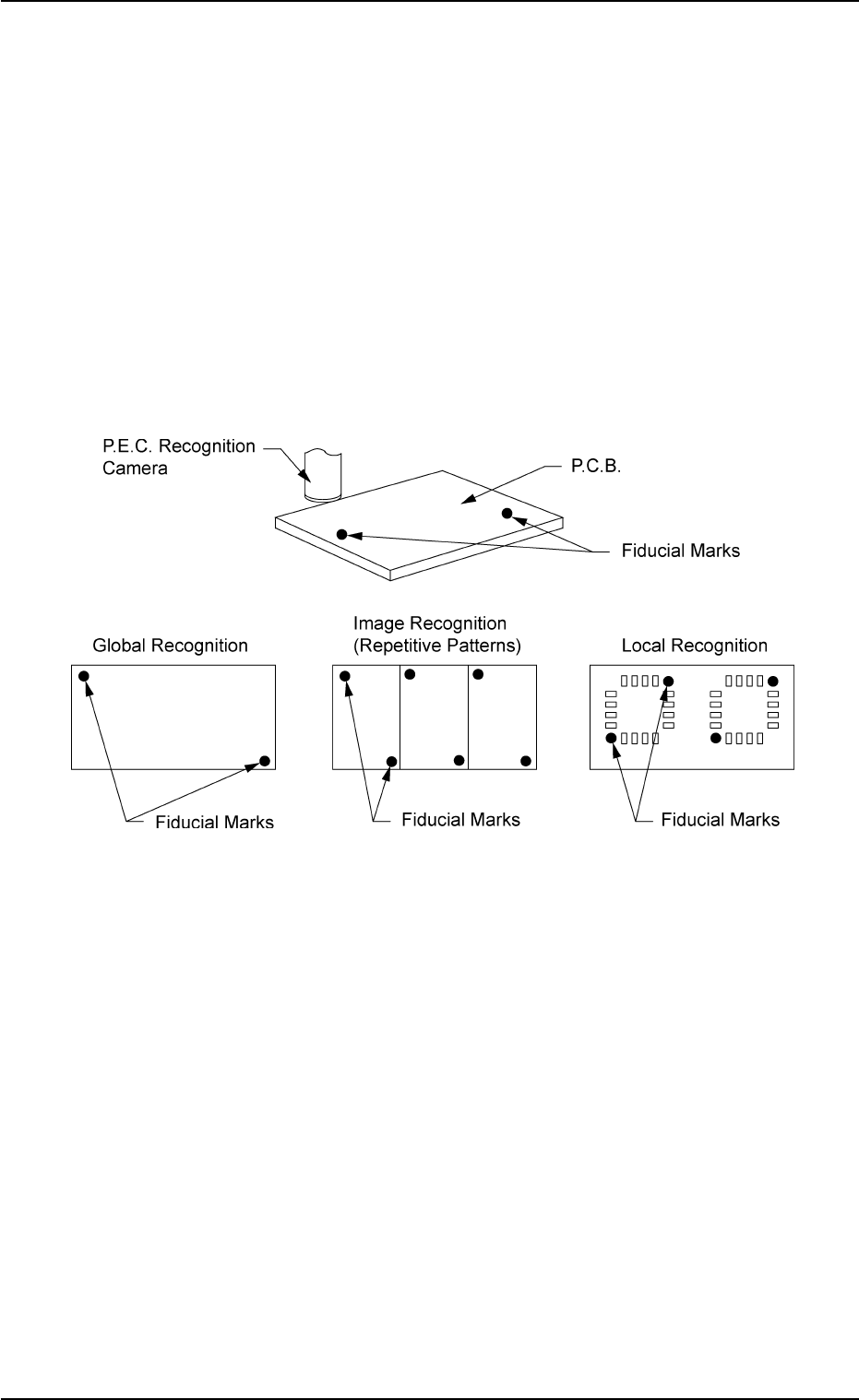
In normal cases, two fiducial marks are put on a P.C.B. and the coordi-
nate data and positional deviation are detected by the P.E.C. recognition
camera. This function automatically corrects placement positions of
components according to the recognized positional deviation.
• There are three kinds of P.E.C. recognition functions - "Global", "Im-
age", and "Local". The global recognition function covers all positional
deviation over one P.C.B. and is used to correct it. The image recog-
nition function is used to correct positional deviation for each indi-
vidual patterns. The local recognition function is used to correct posi-
tional deviation for each component placement point.
Fig. 2B22
0206-002 2-16 AHB01ESPP
2.4 P.E.C. Recognition Function
• How to use the P.E.C. recognition function
Table 2B4
Step Reference
1. Confirmation of Specifications "2. Specifications" in "Section 1"
2. Creating a Pattern Program
(1) "2.1 Types of P.C.B.’s and Required Data" in "Section
2" of "Vol. 3: Programming and Machine Data"
(2) "2.3 Operation Data" in "Section 2" of "Vol. 3: Program-
ming and Machine Data"
• A02 P.C.B. Recognition Data
• A03 P.C.B. Recognition Mark Data
(3) "2.5 Placement Data" in "Section 2" of "Vol. 3: Program-
ming and Machine Data"
• C02_02 Unit P.C.B. B.B.R. Recognition
(4) "3. Example of Pattern Program Creation" in "Section
2" of "Vol. 3: Programming and Machine Data"
• "3.2 Single Pattern (P.E.C. Recognition Function
Enabled)"
• "3.4 Repetitive Patterns (Unit P.C.B. B.B.R. Enabled)"
(a) When P.C.B.’s are positioned on the P.C.B. positioning sec-
tion and mechanical accuracy in P.C.B. positioning varies
due to variation in outer dimensions of P.C.B.’s, the P.E.C.
recognition function can work effectively to reduce such
inaccuracy.
(b) Fiducial marks are put to detect the position of placement
patterns. Therefore, the positional relation between fidu-
cial marks and placement patterns must be constant. Oth-
erwise, the placement accuracy cannot be improved.
0107-001 2-17 AHB01ESPP
2.4 P.E.C. Recognition Function
Note