00196044-05 - sg x und x4i fse_en.pdf - 第261页
C&P20A Working Position on Placement Head Pi ckup and Placement Cycle for C&P20A S tudent Guide (FSE) SIPL ACE X Series and X4I Edition 01/2009 EN C&P20A 261 7.4 Pickup and Placement Cycle for C&P20A 7.4.…
C&P20A
Reference Run for C&P20A Head Measuring Z Axis Position for Component Recognition by the Component Sensor
Student Guide (FSE) SIPLACE X Series and X4I
C&P20A Edition 01/2009 EN
260
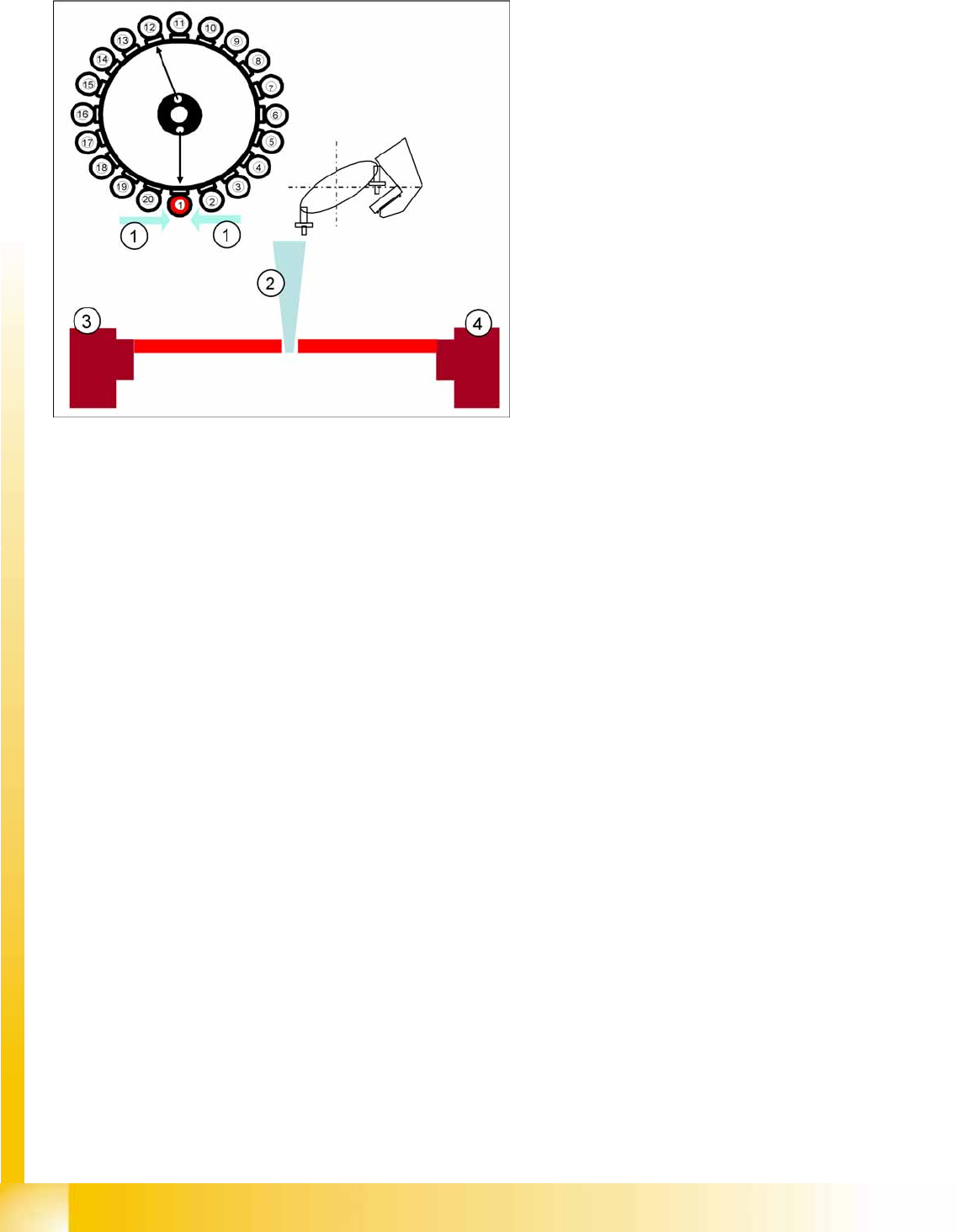
7.3.8 Measuring Z Axis Position for Component Recognition by the Component Sensor
While the Z axis moves downwards, the nozzle interrupts the laser beam of the component sensor. The
axis position is saved and later used for the calculation of the component height and component
presence. At the upwards movement of the Z axis, the laser beam is no longer interrupted and the axis
position is saved again. The component presence can be determined during placement by the
programmed component height (SIPLACE Pro) and the nozzle length, calculated during the height
reference run by the Z axis position counter.
7-17: Nozzle length measurement at reference run for component
recognition
Legend
1. Component sensor
2. Nozzle
3. IR receiver
4. IR transmitter
During the height reference run, the component
sensor measures the Z axis position for each
segment, to detect the presence/absence of
components in the pickup and placement position.
During placement the Component Sensor can also
recognize dirty nozzles.
C&P20A
Working Position on Placement Head Pickup and Placement Cycle for C&P20A
Student Guide (FSE) SIPLACE X Series and X4I
Edition 01/2009 EN C&P20A
261
7.4 Pickup and Placement Cycle for C&P20A
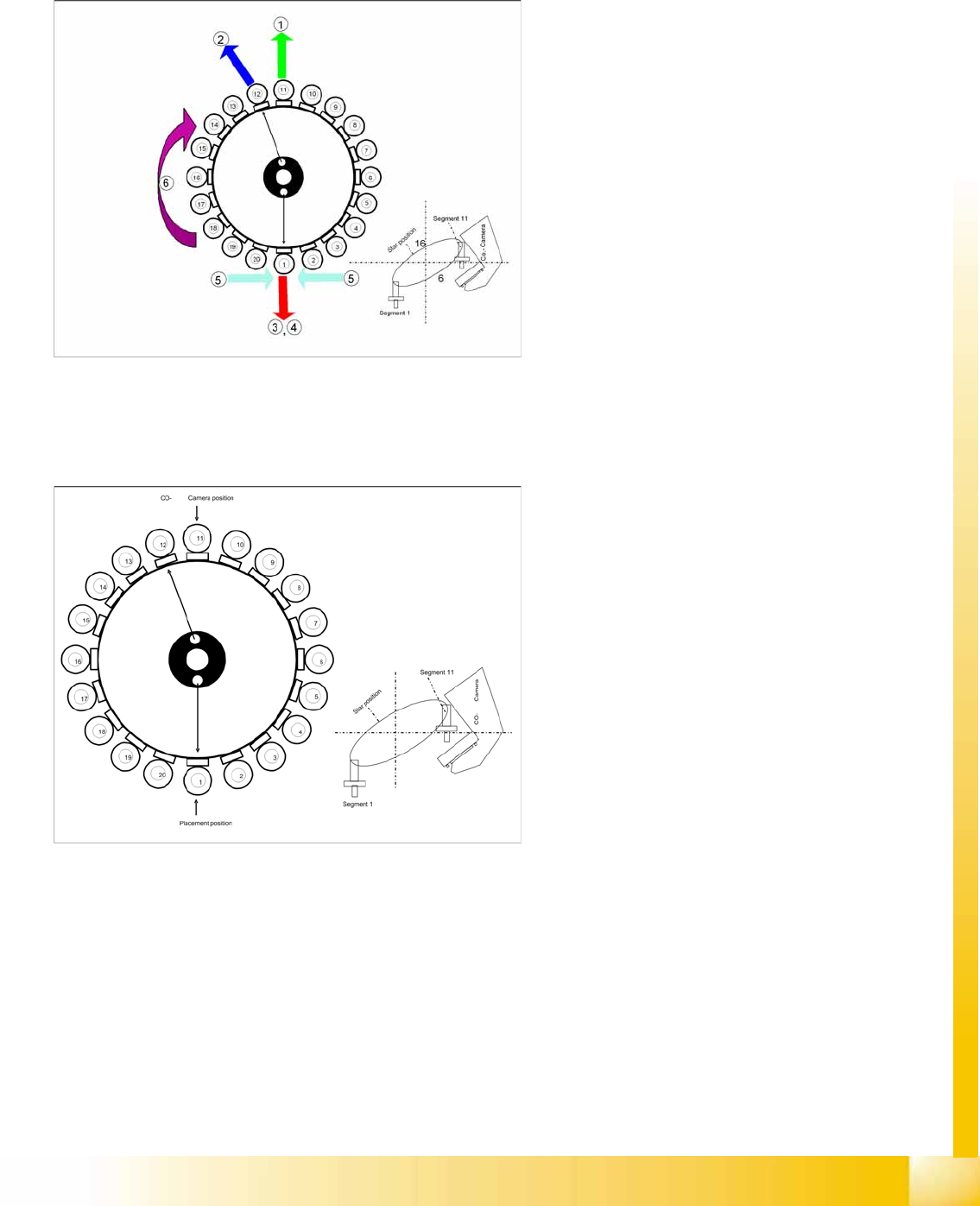
7.4.1 Working Position on Placement Head
7.4.2 C&P20A in Home Position 0°
7-18: Working Position on Placement Head
Legend
1. Optical centering (component camera)
2. Vacuum measurement holding circuit
3. Vacuum measurement placement circuit
4. Pickup/placement station and reject position
5. Position of component sensor
6. Working direction
7-19: C&P20A in Home Position 0°
Star position
Digits: 10
Angle: 0°
1° is equivalent to 1000 digits
The Z axis return unit prevents segment 1 from
falling.
C&P20A
Pickup and Placement Cycle for C&P20A Board Position Recognition
Student Guide (FSE) SIPLACE X Series and X4I
C&P20A Edition 01/2009 EN
262
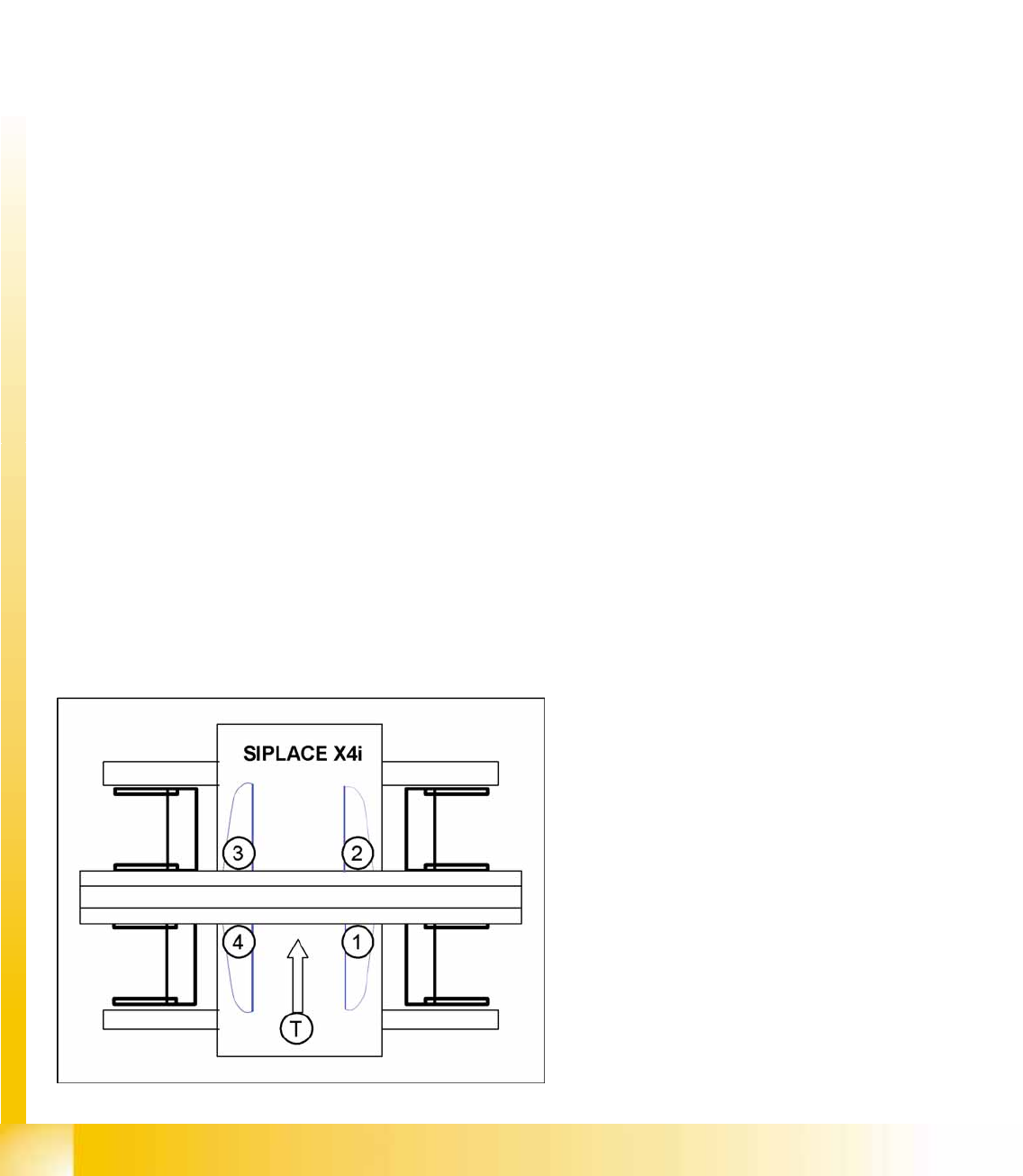
7.4.3 Board Position Recognition
We differentiate between standard position recognition and dual position recognition.
PCB – position recognition (standard position recognition)
Board position recognition is used to determine the exact position of the board in the machine (conveyor
--> placement area).
PCB position recognition is performed with gantry 4 for placement area 1 and with gantry 2 in placement
area 2.
There should be at least two fiducials on each PCB. These are then used to calculated the X/Y position
and the rotary angle of the board, in the conveyor system.
The fiducials should not be on the same line as one another.
Up to 3 fiducials can be programmed for position recognition. With the third fiducial you can also
determine and correct any displacement within the board (shrinkage, stretched).
Dual position recognition (for alternating mode only)
Dual position recognition is required in order to guarantee the placement accuracy. Materials change
according to the temperature they are subjected to and the same applies to the machine gantries.
Dual position recognition is performed with gantry 1 in placement area 1 and with gantry 3 in placement
area 2.
In the case of dual position recognition, gantry 1/3 uses the fiducial position recognition values from
gantry 2/4 to calculate the placement offset for gantry 1/3. Depending on the arrangement of fiducials on
the board, either 2 or 3 fiducials will be used for dual position recognition.
The fiducials for dual position recognition are selected so that the calculation performed can be as
accurate as possible.
Temperature compensation
A further measure to ensure placement accuracy is the temperature compensation with the help of
sensors on the head plate. The head plate features two temperature sensors, the temperature values of
which are regularly checked via a separate bus system.
The software uses these temperature values to calculate an offset value, which is added to the head
offset.
Head offset SW 60x is the distance PCB <--> component camera
Head offset SW 70x is the distance PCB camera <--> nozzle tip
The temperature reference value is the temperature during the last machine calibration.
SIPLACE X4I:
Gantry 4 – position recognition with max. 3
fiducials
Gantry 2 – position recognition with 2 fiducials
Gantries 1 and 3 – dual position recognition
Legend
1: Gantry 1
2: Gantry 2
3: Gantry 3
4: Gantry 4
T: Transport direction