00196044-05 - sg x und x4i fse_en.pdf - 第383页
Twin Head Twin Head Axis Dynamics Axis Control S tudent Guide (FSE) SIPL ACE X Series and X4I Edition 01/2009 EN T win Head 383 9.6.1.2 D Axis During the Reference Run Initial statements about the cor rect head function …
Twin Head
Axis Control Twin Head Axis Dynamics
Student Guide (FSE) SIPLACE X Series and X4I
Twin Head Edition 01/2009 EN
382
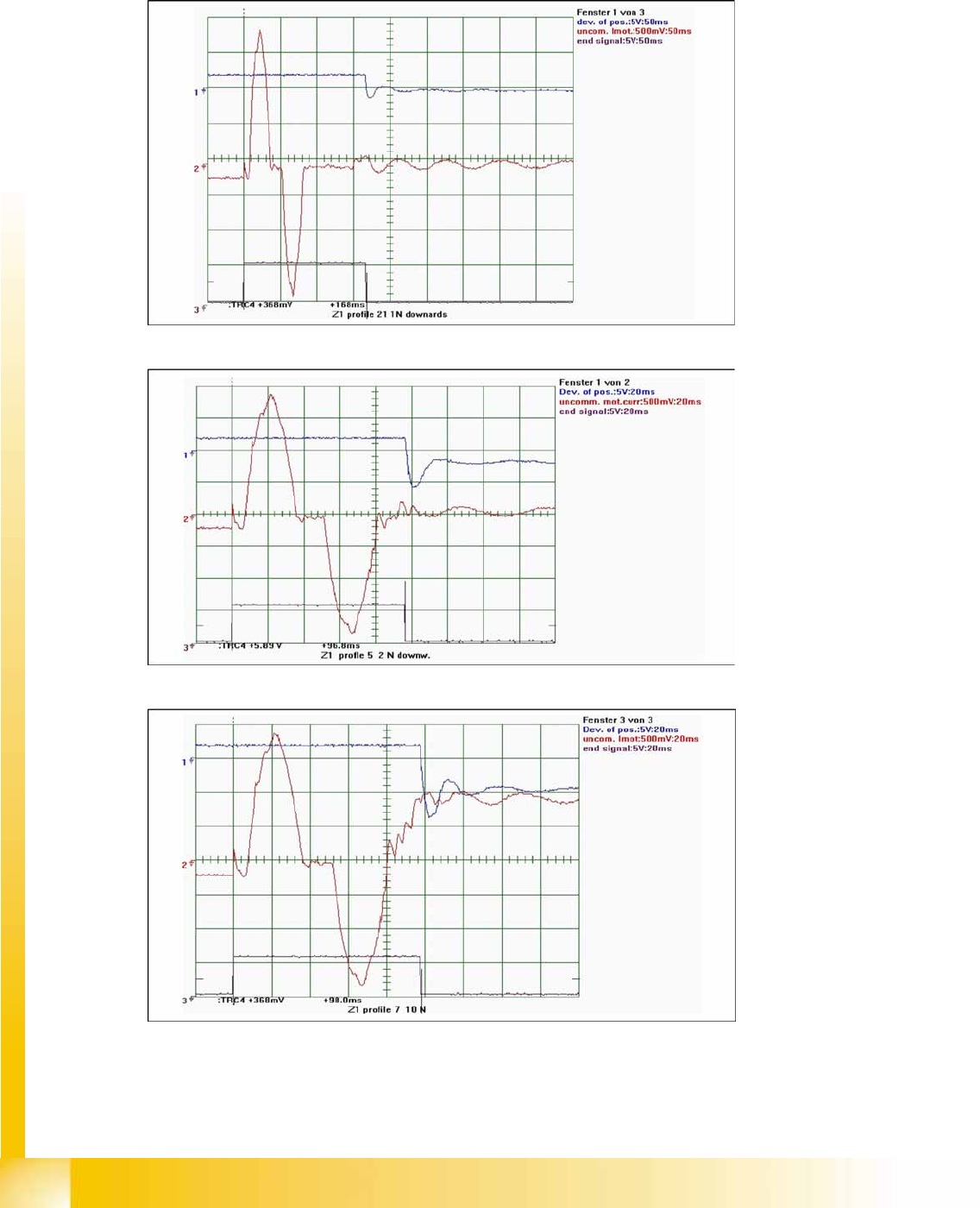
Oscillograms for Various Force Levels
This shows typical oscillograms for Z axis positioning with force sensor mode (as in placement) at
various force levels.
The specified time ranges for positioning are values from travel tests with new heads.
9-24: Placement with 1 N
9-25: Placement with 2 N
9-26: Placement with 10 N
Twin Head
Twin Head Axis Dynamics Axis Control
Student Guide (FSE) SIPLACE X Series and X4I
Edition 01/2009 EN Twin Head
383
9.6.1.2 D Axis
During the Reference Run
Initial statements about the correct head function can be made from the individual procedures during the
reference run.
During Nozzle Changeover
Function errors during nozzle changeover are not based on head axis function errors.
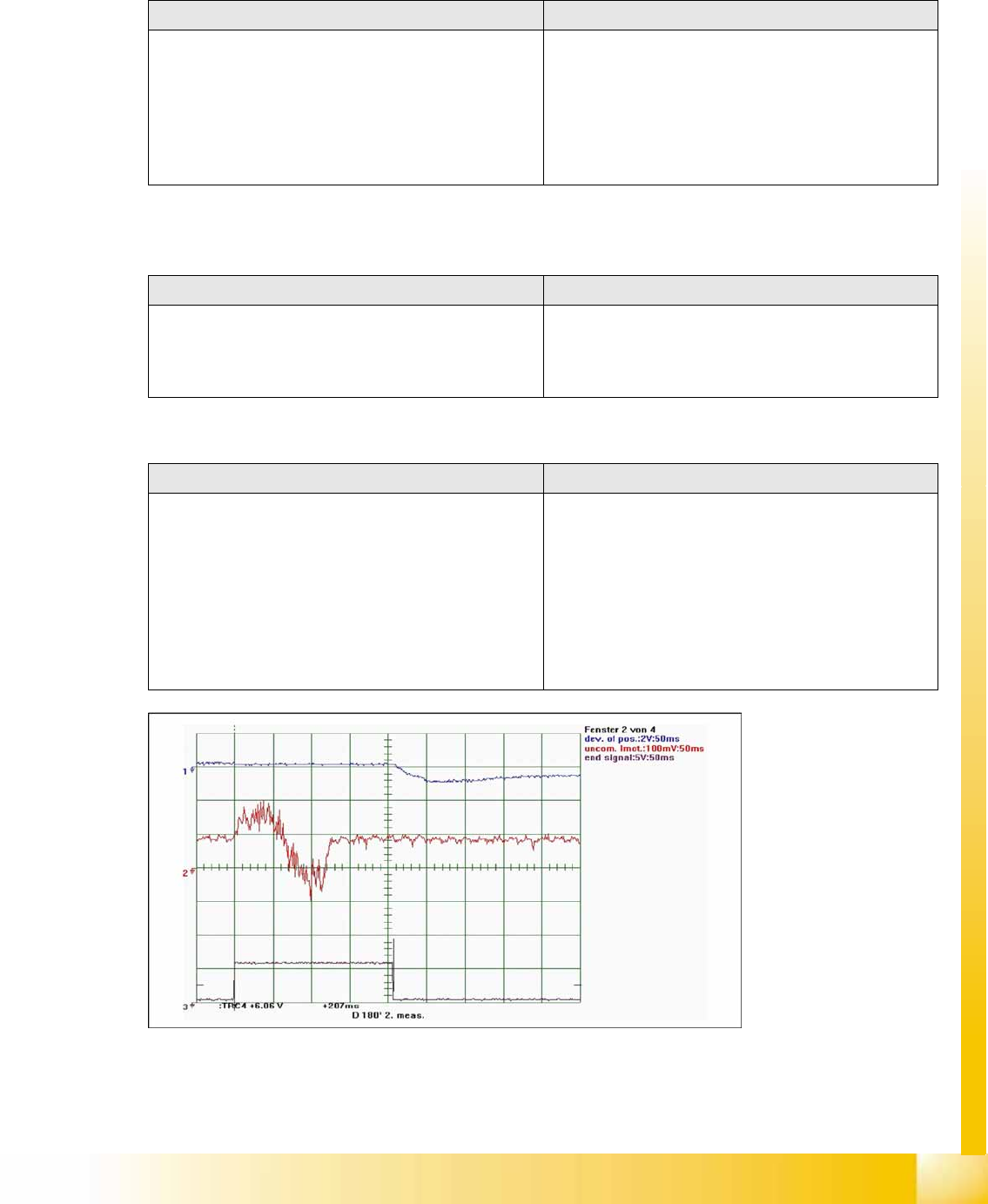
During Positioning with Travel Profiles in SITEST
9-27: D axis 180° positioning
Detailed function: > Description > Result Malfunction: > Description > Cause/Repair
Axis reference run:
1. Search for phase current commutation
2. Positioning at zero point correction (ZPC) target
position:
The D axis is at 0°/180° position. Further processes are
nozzle scanning, vacuum check and height
measurement.
D axis unable to reach target position.
Trailing cable distance error due to motor phase failure.
Stiffness due to defect rotary part
=> replace head
Detailed function: > Description > Result Malfunction: > Description > Cause/Repair
Nozzle pickup:
D axis rotates to place down position.
The D axis rotates around the nozzle in the garage, to
lock.
D axis unable to reach target position.
Cause:
X/Y position of nozzle changer not correctly calibrated.
Detailed function: > Description > Result Malfunction: > Description > Cause/Repair
Positioning to absolute positions:
D axis moved to programmed target position. End
position signal is issued when the target corridor is
reached.
Threshold value:
A 180° positioning may only take max. 230 ms.
Heavy (over 30 gr.) and extremely large components
may exceed this threshold.
Z axis unable to reach target position.
The axis shows an oscillating, permanent deviation of
position. The end position signal is not set within the 130
ms.
Cause:
Electrical defect in servo amplifier
=> replace servo amplifier.
Axis swings up due to electrical or mechanical defects in
head => replace head.
Twin Head
Axis Control Overview of Axis Control for Z and D Axes
Student Guide (FSE) SIPLACE X Series and X4I
Twin Head Edition 01/2009 EN
384
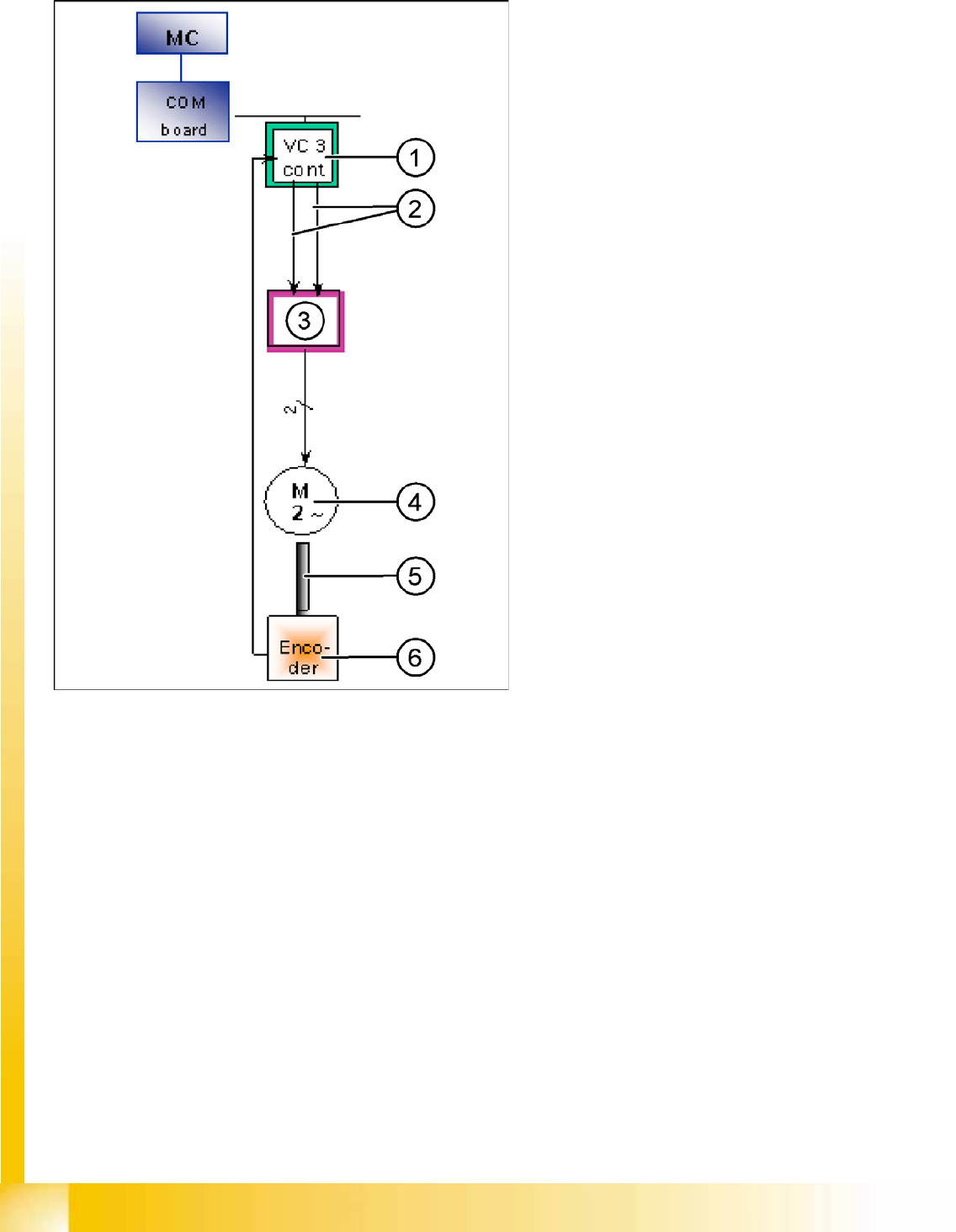
9.6.2 Overview of Axis Control for Z and D Axes
9-28: Axis control (shows D-axis as example)
The axis control system of the closed control loop
for the TWIN Head consists of the following main
components.
Axis controller A363 with VC3 controller or
A364
Servo amplifier (SDS)
Motor
Position measurement system incremental
scale and encoder
Legend
1. Axis controller board A363 with VC3 controller
(VC = Velocity Commutation/speed
commutation controller)
2. Control signals I nom "W" and I nom "U"
3. Servo amplifier function: Motor current limiter
dimensioned by semiconductor or motor load -
amplification of axis controller signals.
Determination of 3rd motor current signal.
Generation of 3 (2) AC motor signals from DC
supply.
The Z/D servo output signals are directly
connected to the motors. This guarantees
operator safety when the safety covers are
opened.
4. The Z axis has 3-phase AC motor with
integrated temperature sensor.
The D-axis has a 2-phase motor.
5. The motor and the incremental encoder are
fixed (rigid) to one another.
6. Incremental encoder: Traces the exact
position of the axis via the track signal.