00196044-05 - sg x und x4i fse_en.pdf - 第380页
Twin Head Axis Control Twin Head Axis Dynamics S tudent Guide (FSE) SI PL ACE X Series and X4I T win Head Edition 01/2009 EN 380 During the Reference Run Initial statements about the cor rect head function c an be made f…
Twin Head
Twin Head Axis Dynamics Axis Control
Student Guide (FSE) SIPLACE X Series and X4I
Edition 01/2009 EN Twin Head
379
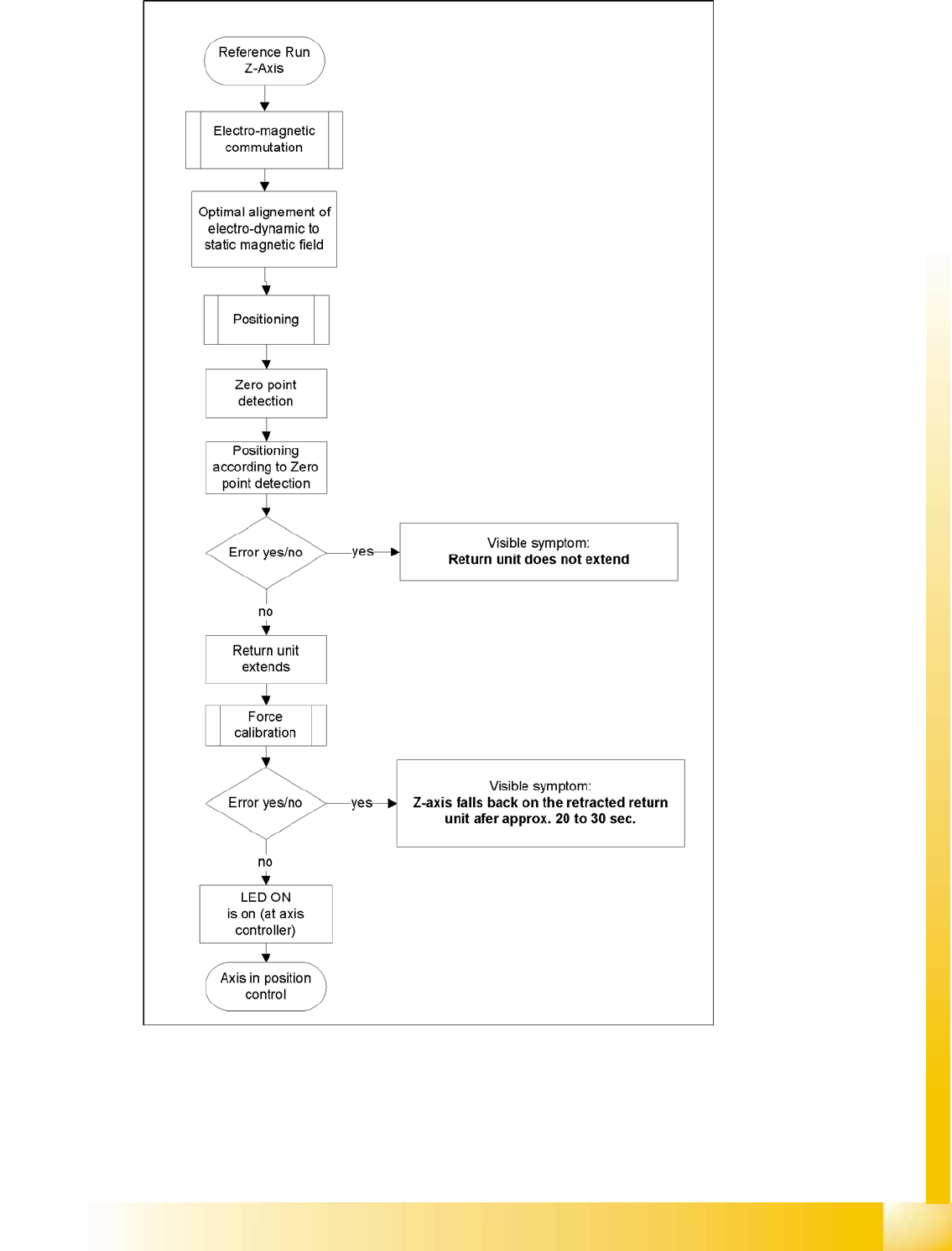
9.6.1.1 Z axis
9-22: Flowchart illustrating the function of the Z axis at the Twin head
Twin Head
Axis Control Twin Head Axis Dynamics
Student Guide (FSE) SIPLACE X Series and X4I
Twin Head Edition 01/2009 EN
380
During the Reference Run
Initial statements about the correct head function can be made from the individual procedures during the
reference run.
Z axis linear motor defect – replace the placement head.
Force measurement board defect – replace the placement head, due to the mechanical and electrical
calibration procedures required with special equipment.
During Nozzle Changeover
Function errors during nozzle changeover are not based on head axis function errors.
Detailed function: > Description > Result Malfunction: > Description > Cause/Solution
Axis reference run:
1. Search for phase current commutation
2. Zero point search
3. Position to calculated NPC target position
Result:
Servo-controlled Z axis is referenced.
Next step: force measurement board comparison.
Z axis unable to reach target position.
FM axis not correctly initialized.
Return cylinder does not move out.
Solution:
Remove mechanical stiffness (due to transport locks) or
replace head.
Force calibration:
Automatic calibration of force measurement board
during initialization.
Result:
Return cylinder moves out (downwards).
Force measurement calibration fails.
Return cylinder does not move out. Z axis falls down to
position of return cylinder, after 20-30 seconds.
Cause: Force measurement board defect.
Solution: Replace head
Height reference run
Test nozzle length at conveyor side:
Z axis tests nozzle length with 1 N placement force and
slow approach to conveyor side.
Travel speed is proportional to the value entered for the
spring pretension.
Twin head is moved to waiting position.
Threshold value: max. spring pretension should not
exceed 700 mN.
Height measurement fails.
Positioning ends with timeout error.
Z axis does not touch conveyor edge.
Cause: Incorrect entry for spring pretension with more
than 700 mN.
If this value is correct (according to the label), replace
the head.
Detailed function: > Description > Result Malfunction: > Description > Cause/Repair
Nozzle pickup:
Z axis travels in current sensor mode into the nozzle
interface, to engage.
The placement force is then reduced to facilitate rotation
of the D axis.
Result:
Z axis tests nozzle length after first pickup.
Z axis unable to reach target position.
Cause:
Nozzle rotated by 3° and inserted into garage at wrong
angle. X/Y position of nozzle changer (NC) not correctly
calibrated.
Solution:
Calibrate the nozzle changer.
Put down the nozzle:
Z axis travels with set force into the garage.
Rotate the nozzle to lock.
Z axis travels with set force up again.
Z axis unable to reach target position.
Cause:
Garage already occupied.
Nozzle has been manually attached at incorrect angle.
X/Y position of NC not correctly calibrated.
Twin Head
Twin Head Axis Dynamics Axis Control
Student Guide (FSE) SIPLACE X Series and X4I
Edition 01/2009 EN Twin Head
381
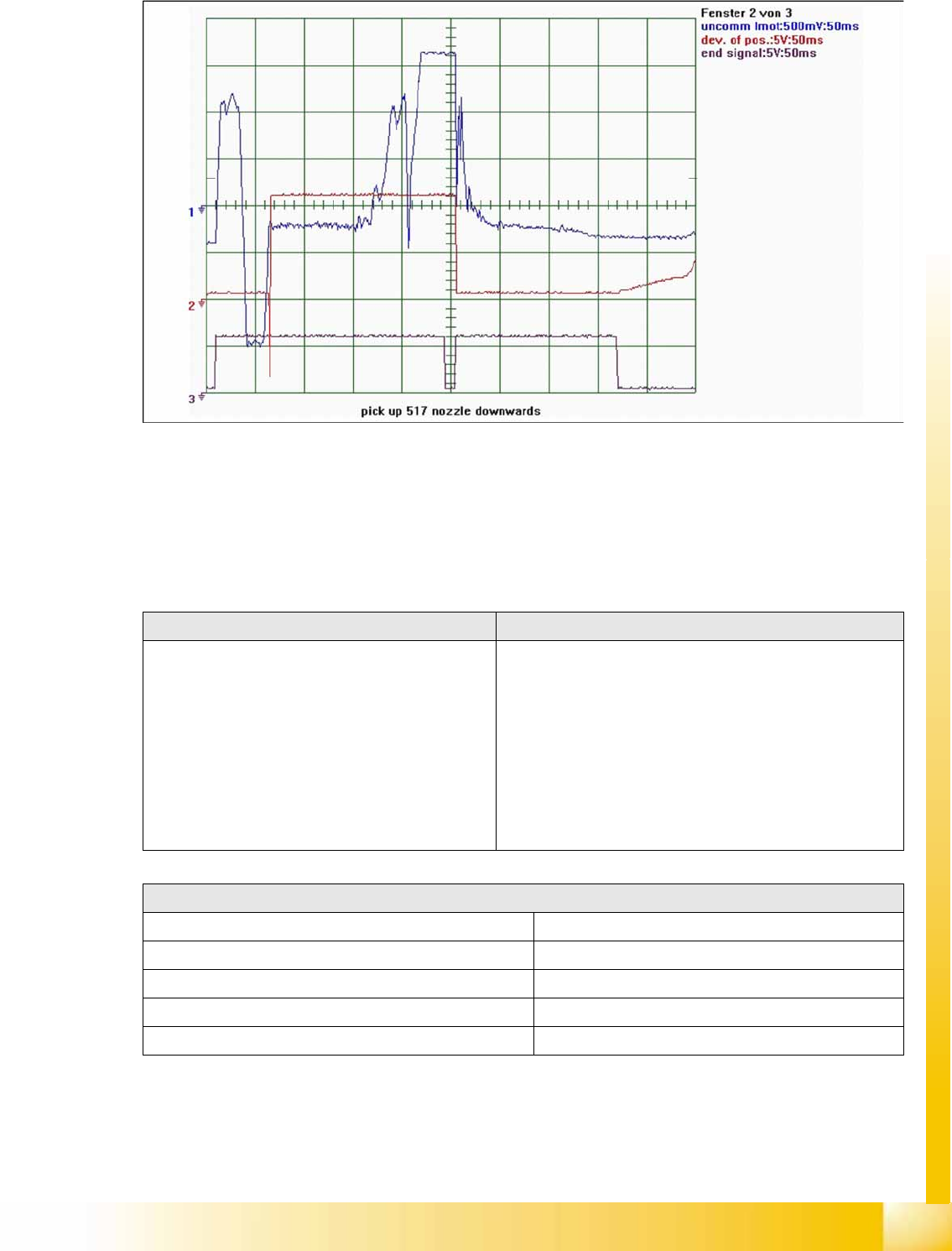
Oscillogram of a Nozzle Changeover
9-23: Nozzle pickup, Z axis down
The current flow adjustment marked as (1) shows the moment when the nozzle engages with the nozzle
interface with increased force and subsequent unloading.
During Positioning with Travel Profiles in SITEST
The following travel times can be determined via SITEST or by measuring the Z axis travel profiles at
placement (with a defined force).
Detailed function: > Description > Result Malfunction: > Description > Cause/Repair
Positioning to absolute positions:
Z axis moved to programmed target position. End
position signal is issued when the target corridor is
reached.
Z axis unable to reach target position.
The axis shows an oscillating, permanent deviation of
position. The end position signal is not set within the timeout
time.
1. Possible cause:
Electrical defect in servo amplifier => replace servo
amplifier.
2. Possible cause:
>Axis swings up due to electrical or mechanical defects in
head => replace head.
Typical travel times indicating correct Z axis function:
Placement with 2 N – standard 95 - 105 ms
Placement with 1 N 170 - 180 ms (placement time not decisive)
Placement with 5 N 90 - 100 ms
Placement with 10 N 80 - 90 ms
Placement with 15 N – highest force of standard Twin 85 - 95 ms