SM431_Administrators_Guide(Chi_Ver2).pdf - 第229页
8-9 供应装置的设置 的 <Result> 列没有被设定为 Off 、 On-F 或 Z-S 的一切带式喂料器, 反复对其执行 “XYZ 示教 ” 功能。 < 拾取 > 按钮 对当前 “Feeder Base” 对话框中选择的 Ta p e F e e d e r 执行部件吸附 。 此时, 应该预 先选择 Device (要执行吸附的磁头) 成功地吸着后显示以下对话框 。 <Part Dippin…
8-8
Samsung Component Placer SM431 Administrator’s Guide
站位移动 时
按钮选择当前选定Slot以前的Slot, 按钮选择当前选定Slot的 以
后 Slot。
喂料器移动 时
按钮在当前选定的设置 Feeder的Slot的以前Slot中选择设置Tape
Feeder的Slot(按Slot序号小的顺序), 按钮在当前选定的设置Feeder
的Slot的以后Slot中选择设置Tape Feeder的Slot。(按 Slot 序号大的顺序)
<校正所有喂料器取料中心>按钮
安装在对应喂料器底座的带式喂料器中在“喂料器登录”对话框的<Grid>领域对
<PT>列设置成ON或ON-S的所有带式喂料器反复执行‘袋示教’功能。
<TeachingXYZ> 按钮
可以适用于针对“喂料器基座”选项卡对话窗的<Result>列为“On”的带式喂料
器进行自动示教吸附点的示教作业。
特定带式喂料器虽然正常地安装在喂料器底座的插槽上,但因为该喂料器的原
因而和系统所设定的吸附点出现差异时,可以使用该功能人为地自动示教吸附
点。
如果是带式喂料器所供应的Chip元件,可以使用“TeachingXYZ”功能更加精确
地进行元件的吸附作业。
XYZ示教将识别所供应的料带的 Pocket或带式喂料器的链轮孔后进行补正作业
而使得当前吸附位置对齐Pocket中心
位置。然后将其结果反映到<
Result>列
(ON-S:成功,ON-F:失败)。
结果为ON-S时,通过视觉方式检查该带式喂料器上补正过的吸附点上是否有元
件。
如果是Embossing喂料器,使用光束并利用料带导引器的上部面与元件的吸附位
置之间的高度差判断元件的存在与否。然后将其结果反映到<Result>列(P-S:成
功,P-F:失败)。
结果为P-S时,针对该带式喂料器上补正过的吸附点的Z轴高度进行量测。将其
结果将反映到 <Result>列上(Z-S:成功,Z-F:失 败 )。
如果是带式喂料器,利用高度(Height)传感器测量卷带(Reel Tape)的上部面的高
度。如果是Emboss喂料器,则在元件的吸附位置利用高度传感器测量高度。
如果设备上没有安装高度(Height)传感器,则使用“Z轴高度测量”功能对Z轴高
度进行示教。关于“Z轴高度测量”功能的说明请参阅“<Z轴示教>键”的说明。
<Teaching all XYZ position> 按钮
对于安装在该喂料器底座上的带式喂料器中并且“喂料器底座”选项卡对话窗口
8-9
供应装置的设置
的<Result>列没有被设定为Off、On-F或Z-S的一切带式喂料器,反复对其执行
“XYZ示教”功能。
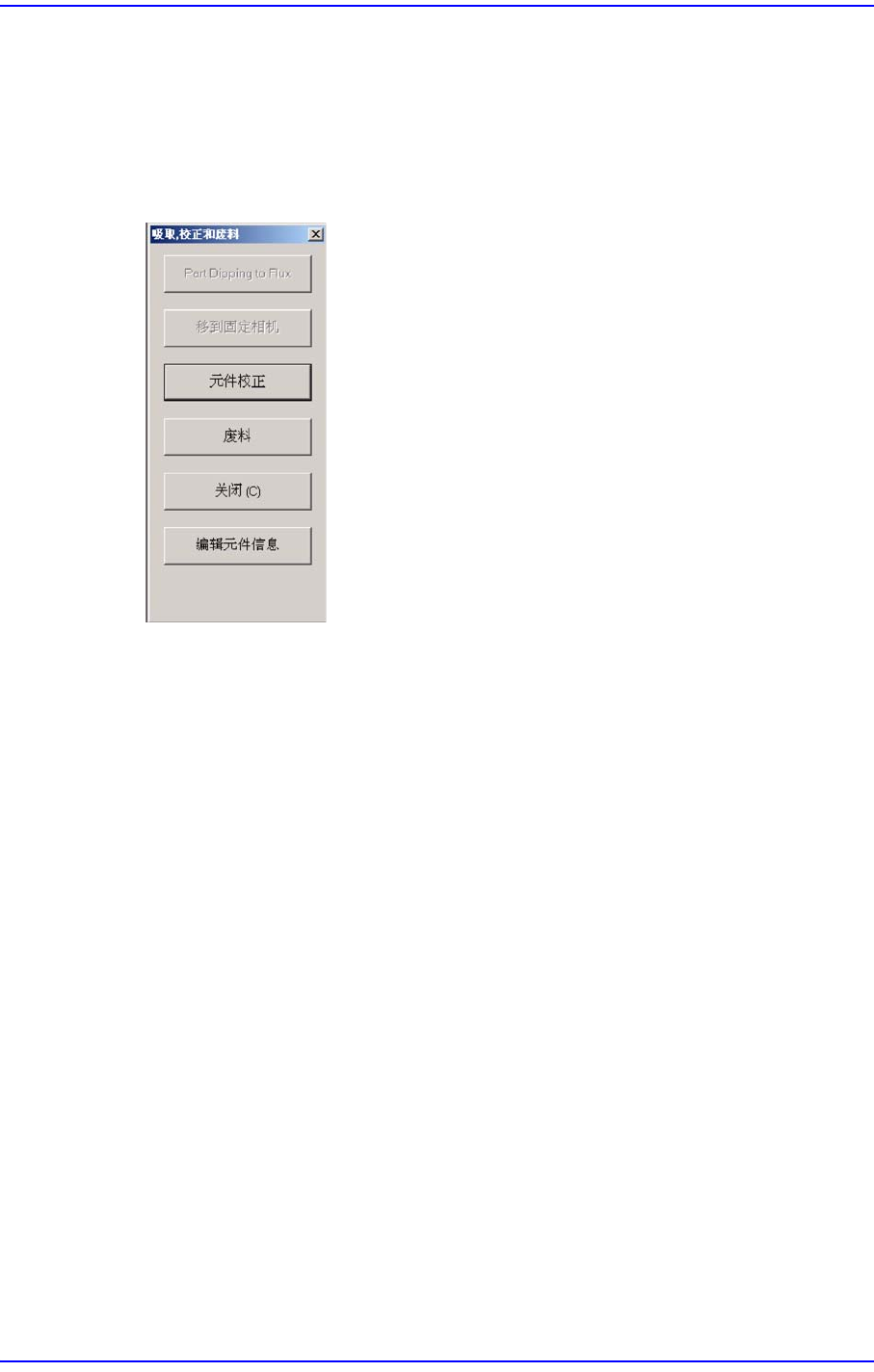
<拾取> 按钮
对当前 “Feeder Base”对话框中选择的Tape Feeder 执行部件吸附。此时,应该预
先选择Device(要执行吸附的磁头) 成功地吸着后显示以下对话框。
<Part Dipping to Flux> 按钮
把对应的部件移动到FLUX装置沾上焊剂后Head Spindle上升到部件识别高
度。
<移到固定相机> 按钮
仅在识别对应部件的相机为‘Fix-Camera’时被激活。单击此按钮时,<示教>
领域的 <装置> 组合框中选择的对象移动到固定相机位置。
<元件校正> 按钮
进行对该部品的排列。
<废料> 按钮
把部品堆存到指定的废料盒。
<关闭> 按钮
关闭对话框。
<编辑元件信息> 按钮
显示该部品元器件编辑对话框。
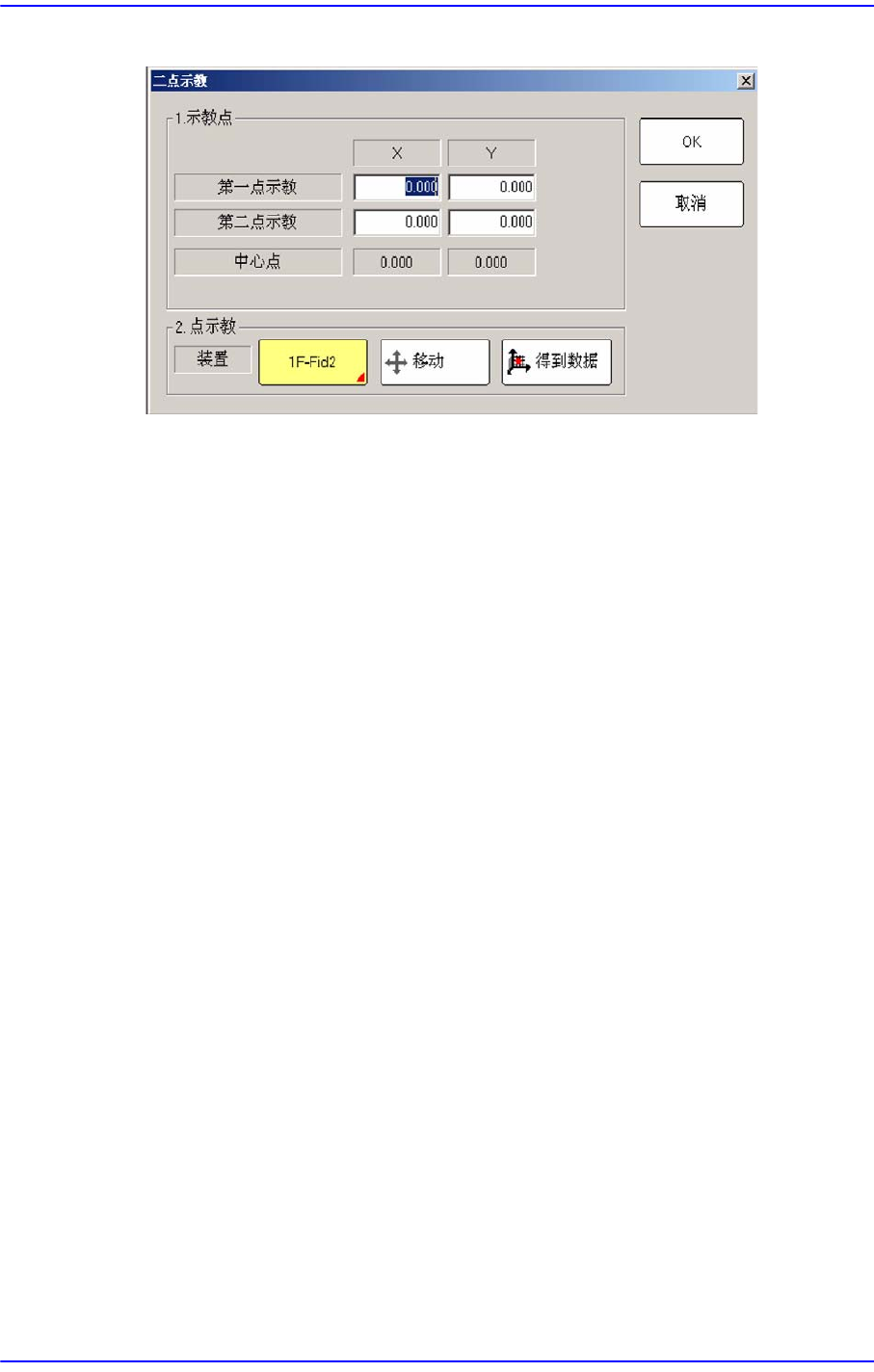
<两点示教…> 按钮
因画面不显示全部部件很难示教部件的中心时使用的功能,示教相应部件的对
角线2点来示教部件中心的方法。单击此按钮时显示以下对话框。
8-10
Samsung Component Placer SM431 Administrator’s Guide
图
8.6 “
喂料器底座
”TAP
对话框的
‘2POINT TEACH’
对话框
<1. 示教点> 领域
设定用来计算中心点的对角线两段的2个点的位置。
示教第1个点: 设定对角线两段的2个点当中第一个点的位置。
示教第2个点: 设定对角线两段的2个点当中第二个点的位置。
中心点: 显示利用对角线两段的2个点算出的中心点。
<2. 点示教> 领域
为了进查找部件的正确吸附点执行‘两点示教’时使用。
<装置> Selection control
旋转XY轴驱动马达选择要移动到执行‘两点示教’的部件位置的Fiducial
camera时使用。可选择的对象如下。
Fid1: 选择对应Gantry的‘Fiducial camera1’。(选项)
Fid2: 选择对应Gantry的‘Fiducial camera2’。 (标准)
<移动> 按钮
在<装置 >Selection control中选择的Fiducial camera移动到要执行‘两点
示教’的部件位置。点击此按钮之前需要在 <1.测定点 >领域用鼠标选择
所要位置对应的测定点。
<得到数据> 按钮
<装置> Selection control中选择的对象为基准获取X, Y
坐标
。
<推动 上/下> 按钮
运行当前选择的带式喂料器的驱动气缸。运行气缸则上升喂料器的驱动LEVER
打开喂料器闸门。请在此状态下执行吸附点示教。
<站位间距> 按钮
选择此按钮则以各喂料器插槽坐标为1号插槽的吸附点为原点表示相对坐标。