SM431_Administrators_Guide(Chi_Ver2).pdf - 第323页
12-19 Machine Calibration 请单击 < 歪斜修正 > 按钮。 那么自 动对 Z 轴执 行初始化, Y1 轴电动机旋 转, 到感知 Y Home 传感器为止移动 X 机架, Home 传感器感知后, 反方向 移动相当于 Y 轴 移动距离后, 再感知 Y 轴 Home 传 感器为止反方向移动。 然后如下图显示 Skew 信 息, 问是否适用该值。 Gantry 1 校正作业完毕后, 将自动 校正 …
12-18
Samsung Component Placer SM431 Administrator’s Guide
Head Homing → Gantry Homing → Skew Offset → Conveyor
<查找限度所有坐标> 按钮
对所有轴搜索极限。单击此按钮则按如下顺序执行作业。
Head Z → Gantry Limit → Conveyor
<Home Info.[mm]>领域
显示所选马达的HOME位置和HOME INDEX。
<更新> 按钮
执行校正后单击此按钮适用其变更值。
<取消> 按钮
关闭对话框。
注 意 重新校准后,原点位置会改变。如果不重新示教拾取位置、 ANC
及贴装原点等与设备位置有关的项目,将导致设备动作异常。
从新校准后,必须重新示教与位置有关的项目。
12.3.2. 弯曲纠正
Skew意味着设备移动后对Y1和Y2轴 X轴不形成垂直状态,补偿发生的歪斜。 这个
鼻息在设备的最初安装及移动后执行。对Y轴执行螺母补偿方法如下;
注 意 最初设备的安装及移动后,执行初始化之前必须执行 <螺母补偿
>。否则设备驱动中可能会受到损伤。
如果运转过程中两轴的Index offset与基准偏差值之间的差异超
过了某一基准,将判断两轴出现了歪曲现象,请停止设备运转。
12-19
Machine Calibration
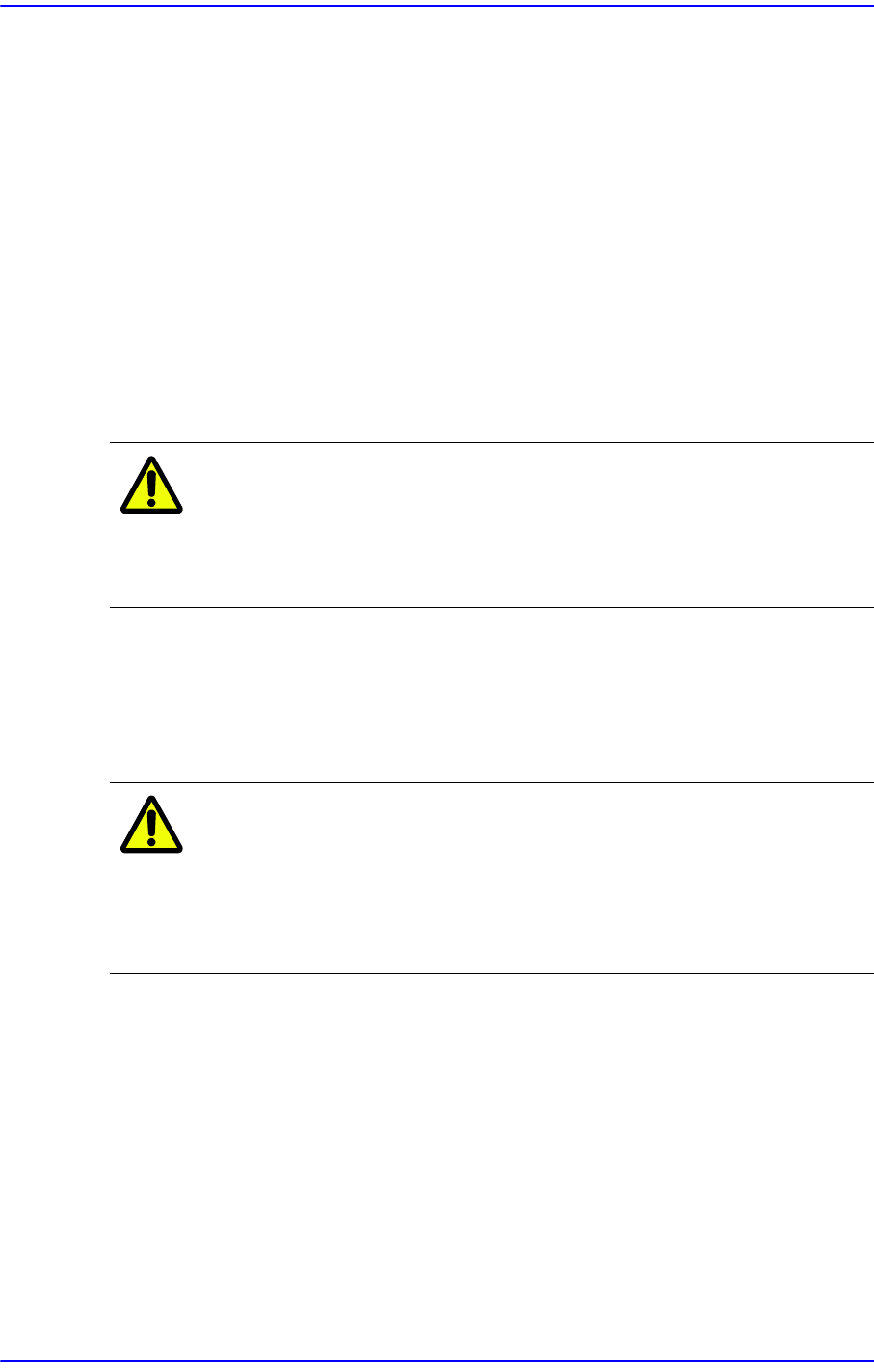
请单击<歪斜修正>按钮。那么自动对Z轴执行初始化,Y1轴电动机旋转,到感知
Y Home传感器为止移动 X 机架, Home 传感器感知后,反方向移动相当于Y轴
移动距离后,再感知Y轴Home传感器为止反方向移动。
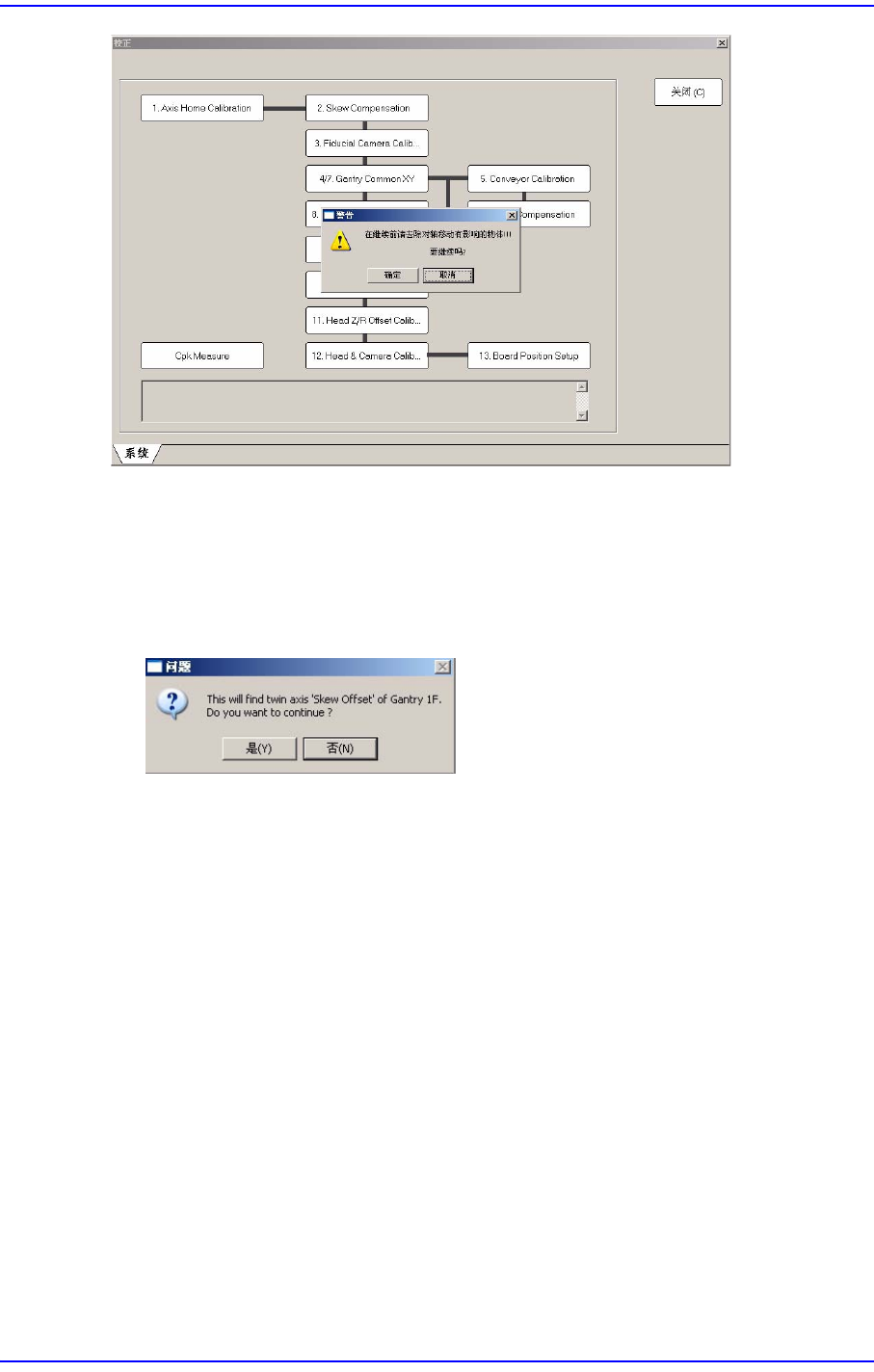
然后如下图显示 Skew 信息,问是否适用该值。Gantry 1校正作业完毕后,将自动
校正Gantry 2。
单击<是(Y)>按钮,则按照适用的 Skew信息设备重新执行初始化。

12-20
Samsung Component Placer SM431 Administrator’s Guide
12.3.3. 基准照相机测量
在SM431因为没有FIX CAMERA因此校正大部分用Fiducial camera进行。为了检查
基准摄像机的倍率与装贴角度而进行。
<1. Mark Position> 按钮
如果要执行Fiducial Camera的Scale Calibration请预先示教ANC校正工具位置上
的校正工具中心的基准标。
如果没有对基准标记进行示教,就不会激活<2. 基准摄像机1比例(Scale)>键。
如果使用校正工具校正Fiducial Camera的Scale Calibration时请在操作前把校正
工具放置于正面ANC的校正工具位置。
1:
校正工具位置
下面是用基准相机 Teaching 示教 ANC顶面的校正Too1 的Reference Fiducial