SM431_Administrators_Guide(Chi_Ver2).pdf - 第307页
12-3 Machine Calibration < 示教 > 领域 按钮 设定基准相机的照明。 选择此按钮 时显示如下的对话框。 Selection control 用于旋转 XY 轴驱动电动机选择要移动 到指定坐标位置的对象或用于选择 所 要获取当前坐标的对象。 基准相机 1: 选择对应 Gantry 的 ‘fiducial 照相机 1’(Option) 基准相机 2: 选择对应 Gantry 的 ‘…

12-2
Samsung Component Placer SM431 Administrator’s Guide
<Grid> 领域
设置各磁头(Head)的部件识别高度。
<Head> 列
表示Head的编号。
<Align Height> 列
设置识别部件时的Z轴位置。
“35.5”是指适用于本设备的默认的从PCB顶面的高度。
<Use> 列
可以选择是否使用贴片头。如果发生与Head有关的错误,则可以在这里取消
该对Head的选择而不使用该贴片头。但是为了重新指配分配给该贴片头的
作业,必须重新执行Optimizer程序。
<Vac.Level>列
表示没有当前设置的喷嘴状态下 Head的空压水平。必要时可输入 Head的空
压水平变更当前设置的值。基准值为 160,如果在100~220之间存在相应的
值可判断为空压系统无异常。
<请设置管嘴的真空状态> 按钮
测定各Head的当前空压水平表示在<Grid>领域的<Vac.Level>列。单击此按钮
之前需要先解除插入在喷嘴槽的喷嘴。
<Side View Sensor>领域
可选择选定Gantry的Side View传感器的使用与否。如果相应传感器不正常运
行,可以在此处解除相应传感器的选定不使用相应Head。
<贴装头停留位置> 领域
设定Head Assembly的等待位置。 要修改当前设定的位置,请重新示教该位置。
<当前面的飞达更换按钮按下时> 编辑框
设定按下设备前面的运转面板的 “Feeder Change’”按钮时,Head Assembly的
等待
位置。
<当
后面的飞达更换按钮按下时> 编辑框
设定按下设备后面的运转面板的 “Feeder Change’”按钮时,Head Assembly的
等待位置。
<校准位置> 编辑框
Calibration 时,Head Assembly的等待位置。
<Calibration Tool Position> 编辑框
示教校正工具的位置。请单击<Fiducial>按钮为校正工具位置示教基准标。
完成示教则在编辑框自动输入相应位置。
12-3
Machine Calibration
<示教> 领域
按钮
设定基准相机的照明。选择此按钮时显示如下的对话框。
Selection control
用于旋转XY轴驱动电动机选择要移动到指定坐标位置的对象或用于选择所
要获取当前坐标的对象。
基准相机1: 选择对应 Gantry的‘fiducial照相机1’(Option)
基准相机2: 选择对应 Gantry的‘fiducial照相机2’
头1 ~ 头8: 选择对应Gantry的1号~8号的Head。
<移动> 按钮
Selection control 中选择的对象移动到指定的坐标位置。 此时单击该按钮之
前需要在<Head待机位置>用鼠标选择要示教的项目。
<得到数据> 按钮
Selection control中选择的对象为基准获取 X, Y 坐标。
<更新> 按钮
向设备传送变更事项后关闭对话框。
<取消> 按钮
忽略变更事项关闭对话框。
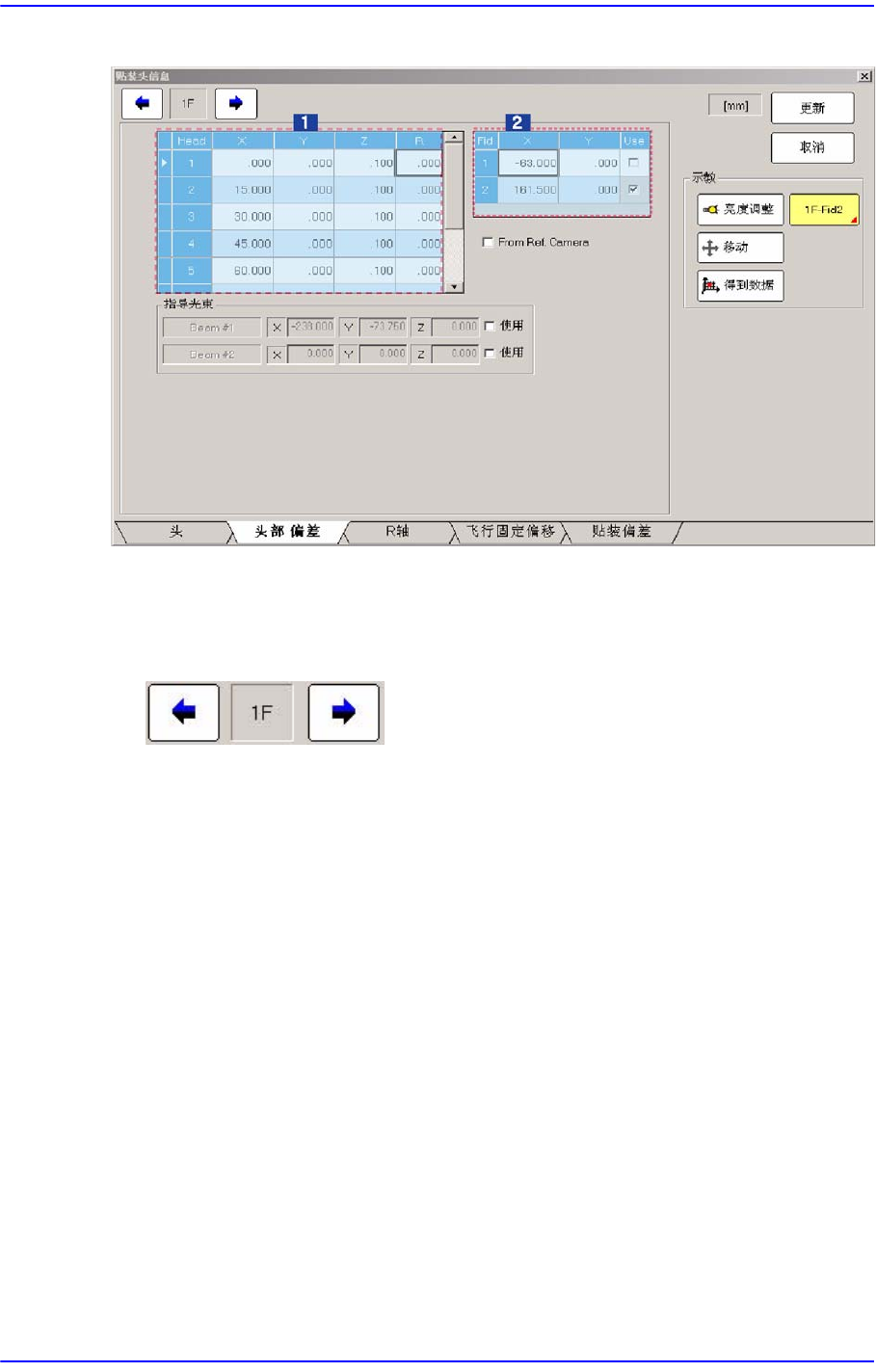
12.1.2. Head Offset
设置各因各磁头机械特性的偏移。 此处显示的Head偏移数据在执行照相机校正后
反应其结果值就自动更新。
注 意 实际各磁头贴装时,反映偏移值进行贴装,因此用户任意修改设
定值,会发生磁头损伤及作业不良,请勿任意修改数据.
12-4
Samsung Component Placer SM431 Administrator’s Guide
图
12.2 “
头部
偏差
” TAP
对话框
1: Grid
领域
2:
基准相机偏移值
Gantry选择用箭头键
1F:显示当前选定的 Gantry。
单击箭头键后选择需要检查设定值的Gantry。
<Grid> 领域
表示以Head1轴为基准到各 Head轴中心的距离(偏移)和Z轴及R轴偏移。
<Head> 列
表示磁头(Head)序号。
<X> 列
设置X偏移值。偏移由Gantry处于XY坐标的Home位置时Head1的X位置定
为‘0’,以此值为基准决定。
<Y>列
设置Y偏移值。 偏移由Gantry处于XY坐标的Home位置时Head1的 X位置
定为‘0’,以此值为基准决定。
<Z> 列
设置Z偏移值。 偏移由PCB基板搬入到作业站时以PCB顶面为基准决定。