SM431_Administrators_Guide(Chi_Ver2).pdf - 第383页
13-5 系统设置 生故障。 < 移动输送轨 > 编辑框 设置的时间内无法完成 Shuttle Move 时, 设备认定为运 行时出现错误。 < 轨道回原点 > 编辑框 设置的时间内无法完成 Rail Homming 时, 设备认定为运行时出 现错误。 < 查找轨道极限 > 编辑框 在设定的时间内未完成输送机宽 度调节轴的极限值查找则视为设 备运行 中发生故障。 < 轨道移动 &…
13-4
Samsung Component Placer SM431 Administrator’s Guide
为了调节输送机宽度移动FRAME移动时多移动设定值大小。
为了PCB在输送机移动通畅留余地。基本值为0.5。
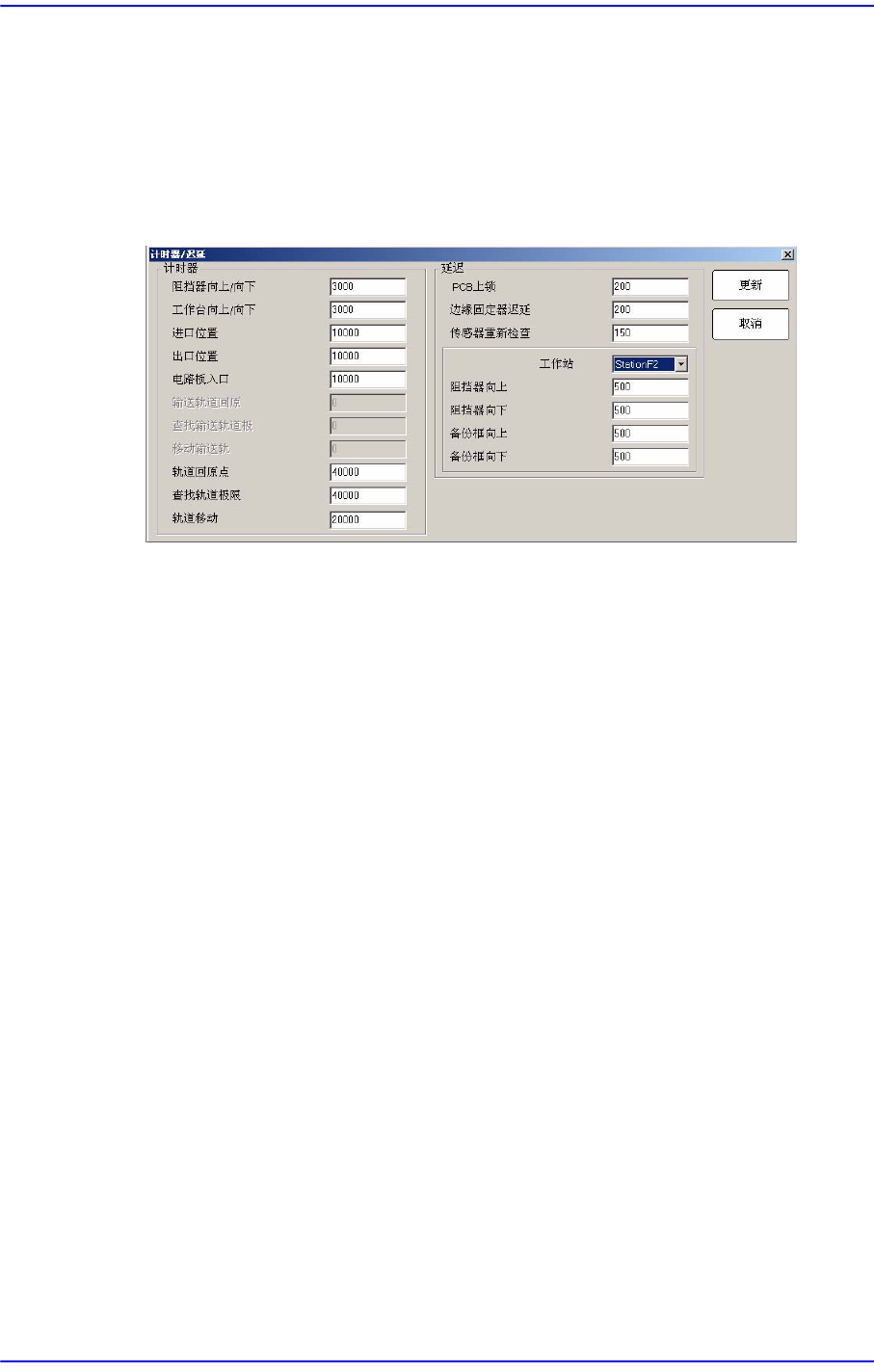
<定时器/推迟> 按钮
执行与PCB传送相关的可设定定时与延迟的 “定时 /延迟”对话框。
图
13.4 “Timers/Delays”
对话框
<计时器> 领域
<阻挡器向上/向下> 编辑框
在指定时间内没有完成停止器的上 /下动作时,设备将判断为动作时出
错。
<工作台向上/向下> 编辑框
在指定时间内没有完成工作台的上 /下动作时,设备将判断为动作时出
错。
<进口位置> 编辑框
在指定时间内没有完成PCB的搬入动作时,设备将判断为动作时出错。
<出口位置> 编辑框
在设置的时间内没有完成PCB搬出工作时,设备认定为运行时出现错
误。
<电路板入口> 编辑框
在设置的时间内没有完成前一个设备接收到PCB时,设备认定为运行时
出现错误。
<输送轨道回原点> 编辑框
设置的时间内无法完成Shuttle Homming时,设备认定为运行时出现错
误。
<查找输送轨道极> 编辑框
在设定的时间内未完成shuttle移动轴的极限值查找则视为设备运行中发

13-5
系统设置
生故障。
<移动输送轨> 编辑框
设置的时间内无法完成 Shuttle Move 时,设备认定为运行时出现错误。
<轨道回原点> 编辑框
设置的时间内无法完成Rail Homming时,设备认定为运行时出现错误。
<查找轨道极限> 编辑框
在设定的时间内未完成输送机宽度调节轴的极限值查找则视为设备运行
中发生故障。
<轨道移动> 编辑框
设置的时间内无法完成 Rail Move 时,设备认定为运行时出现错误。
<延迟> 领域
<PCB上锁> 编辑框
Backup Table开始上升到完成PCB固定为止的延迟时间。
<边缘固定器迟延 > 编辑框
边夹动作后到PCB完成识别为止的延迟时间。
<传感器重新检查 > 编辑框
PCB感应传感器第一次感应conveyer的PCB后,经过设置的Delay后再
次进行感应,防止传感器的误操作。
<工作站> 组合框
选择有关Stopper Delay设置的Station。
<阻挡器向上> 编辑框
Stopper UP传感器检测到制动器后到完成PCB固定为止的延迟时间。
<阻挡器向下> 编辑框
Stopper Down传感器检测到制动器后到完成PCB固
定为止的延迟时间。
<更新> 按钮
把设定
的数据传送到设备之后关闭对话框。
13-6
Samsung Component Placer SM431 Administrator’s Guide
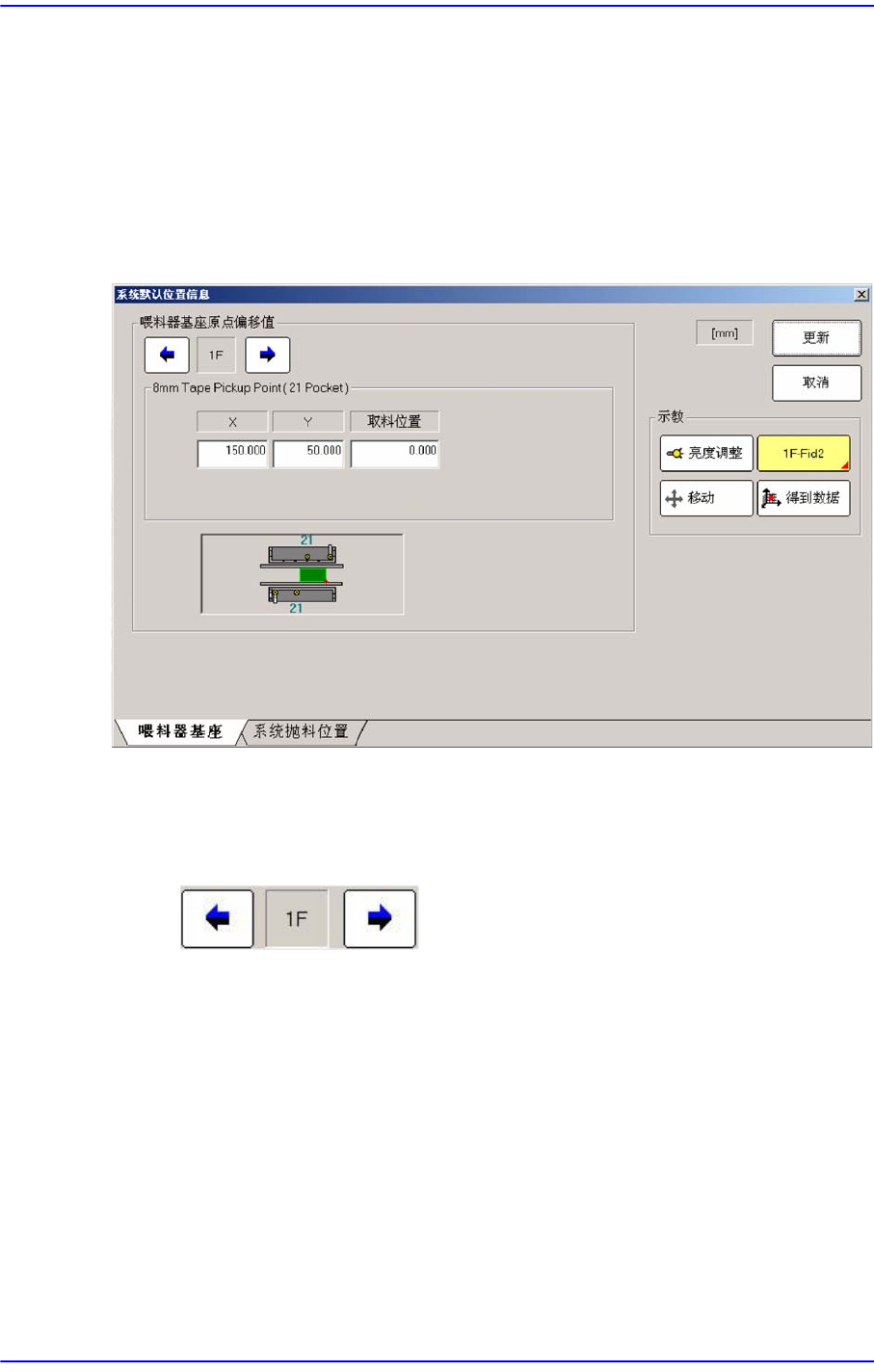
13.2. 位置 (Position) [F4]
设定设备的Feeder Base原点及系统回收箱的位置。
13.2.1. 喂料器基座
设置喂料器底座的原点(Origin)。
图
13.5 “
喂料器基座
” TAP
对话框
<喂料器基座原点偏移值> 领域
设定Feeder Base的原点。
喂料器底座选择用箭头键
1F:显示出当前选定的喂料器底座。(1F:正 面 、1R:背面)
单击箭头键后选择需要设定喂料器底座原点偏置值的喂料器底座。
<8mm Tape Pickup Point(21Pocket) > XY编辑框
设置喂料器底座的原点坐标。
<取料位置> 编辑框
设定Feeder Base原点的 Z值。