JX-350_EPU使用说明书.pdf - 第115页
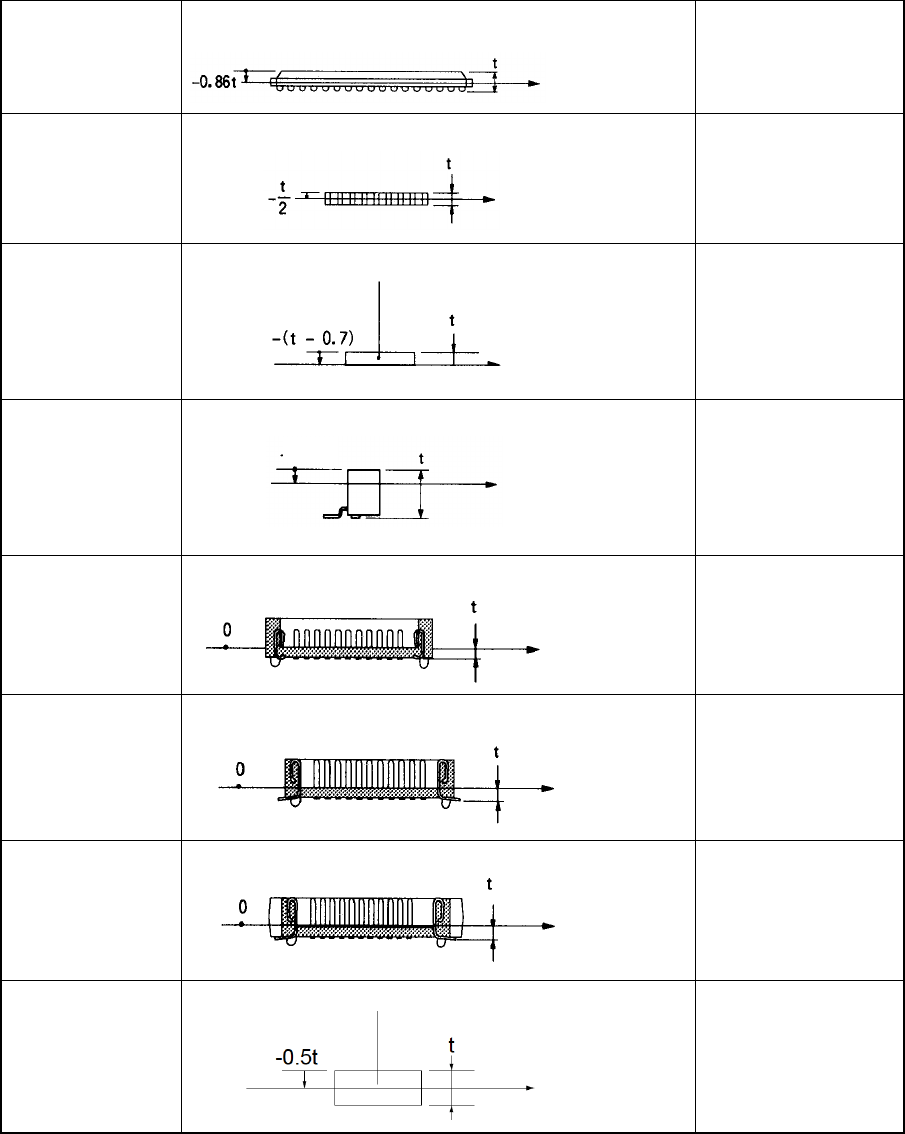
EPU Instruction M anual C hapter 4 Creating a Production Progr am 4- 67 (4 ) Comp Shape Y ou can specify the shape of a component to be recog nized w ith laser . T he main applicable components are described in the table…
EPU Instruction Manual Chapter 4 Creating a Production Program
4-66
BGA
FBGA
-0.86×t
Network resistor
Same as that of the
square chip
Trimmer
- (t – 0.7)
Unidirectional lead
connector
Bidirectional lead
connector
Z-lead connector
-0.5×t
J-lead socket
0
Gull-wing socket
0
Socket with
bumper
0
Other components
-0.5×t
Note 1: If an angle error occurs when a square chip component such as a 0603 resistor is placed
on a board, change the value specified in the “Laser height” menu item on the “Expansion”
tab of the “Component” data screen to almost “-t/3 (default: -t/2), that is, toward the top
side of the component. It may improve the current condition.
Measurement
position with laser
Component height
Molding
Component height
Measurement
position with laser
Measurement
position with laser
Component height
Component height
Component height
Component height
Measurement
position with
laser
Measurement
position with
laser
Measurement
position with
laser
Component height
-0.5
Measurement
position with laser
Component height
Measurement
position with laser
Molding
EPU Instruction Manual Chapter 4 Creating a Production Program
4-67
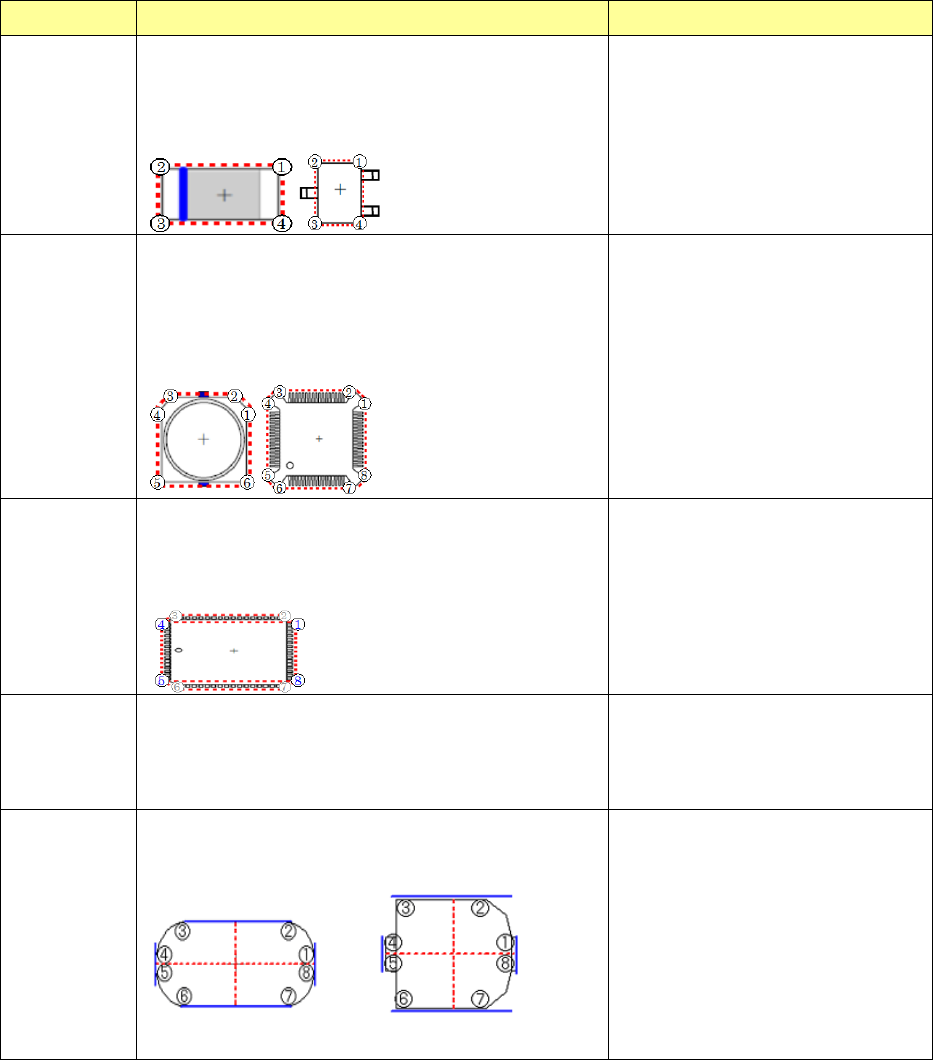
(4) Comp Shape
You can specify the shape of a component to be recognized with laser. The main
applicable components are described in the table below.
Comp Shape
Operation Applicable components
Corner
Square
The system detects four vertexes from the
measurement data and calculates/corrects a
positioning error and/or an angle error to place a
component on a board.
Select this shape for a component whose shape is
similar with a rectangle/square without any notch.
Chip, Melf, SOT, QFN, trimmer,
unidirectional connector,
bi-directional connector, Z-lead
connector and other components
Corner cut
The system detects five to eight vertexes from the
measurement data and calculates/corrects a
positioning error and/or an angle error to place a
component on a board.
Select this shape for a component that has at least one
notch or a component whose lead is located at a
position to be measured with laser such as a QFP.
Aluminum electrolytic capacitor,
GaAsFET, SOP, HSOP, SOJ, QFP,
FQFP (BQFP), TSOP, TSOP2, BGA,
network resistor, J-lead socket,
unidirectional connector, gull-wing
PLCC socket and socket with a
bumper
PLCC
The system detects eight vertexes form the
measurement data, and uses four of them to
calculate/correct a positioning error and/or an angle
error and place a component on a board. This setting
is exclusively for a PLCC.
PLCC
Cylinder
The system calculates/corrects a positioning error at
the pick-up angle set in the measurement data to place
a component on a board.
Select this setting for a component
that has no vertex such as a
cylindrical component. In this case,
the angle is ignored (the polarity is
ignored), and only the center of a
component is obtained.
Flexible
The system extracts a total of 8 measurement data
near positions of smallest component width in the X/Y
direction and calculates/corrects angle offset and then
mounts components.
Flexible is used for components that
result in laser recognition error 93
(shape recognition error) for the
reason of "No missing edge" and
"Missing edge" of polygonal
components, or "PLCC"
Because the number of data to be
used is smaller than other
component shapes, the accuracy is
lower but more types of components
can be measured.
EPU Instruction Manual Chapter 4 Creating a Production Program
4-68
Comp Shape
Operation Applicable components
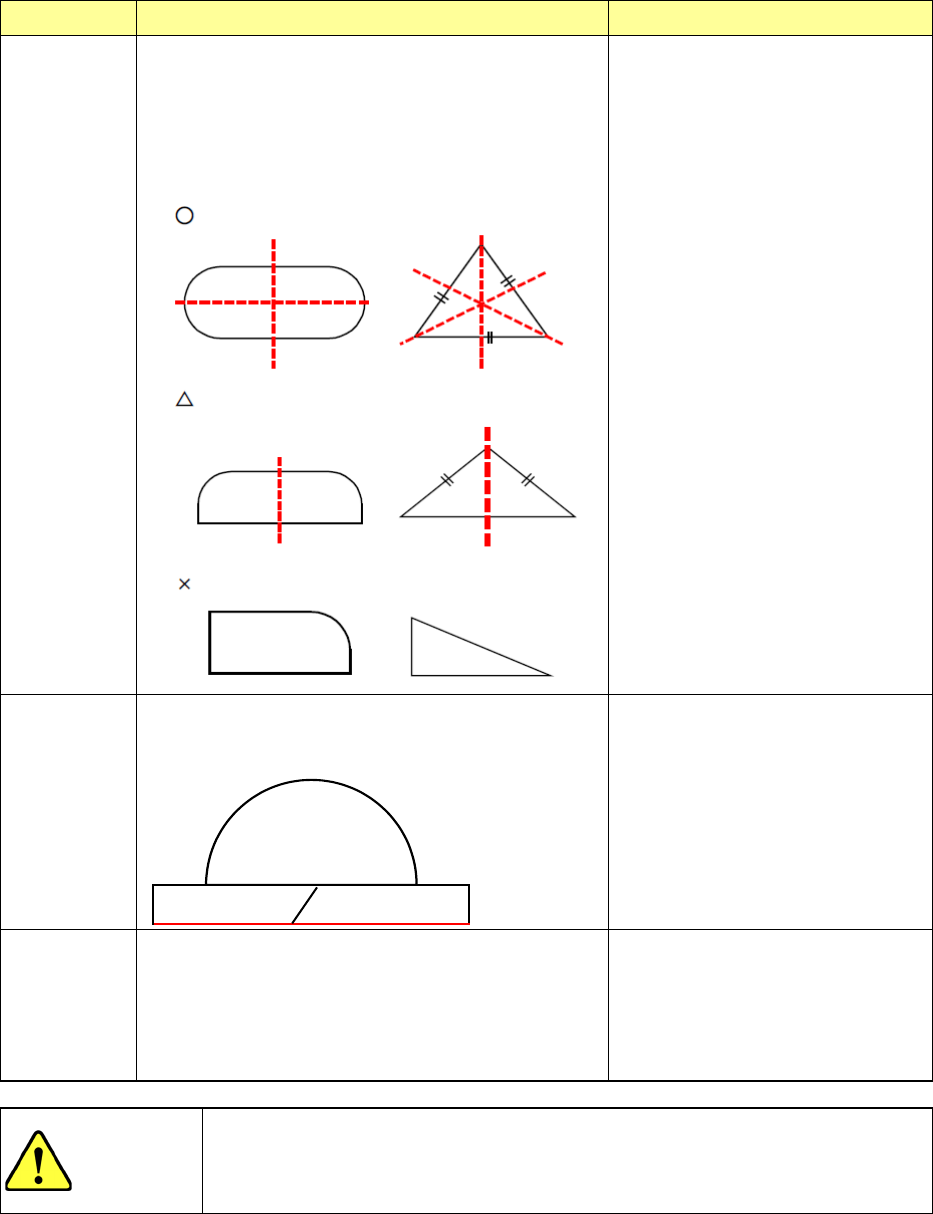
Flexible 2
From the measurement result, a left/right symmetrical
axis of the component is detected. From this axis, the
center coordinates and angle deviation amount of the
component are obtained and corrected for placement.
Regarding the component dimensions, the largest width
is judged as X/Y on the basis of the actual component
angle of 0° from the angle deviation amount
measured by the above calculation.
In the case of a component having
multiple symmetric axes, the center
coordinates of the component can be
accurately obtained. So, this shape
is very effective (example: “○”
component at left). In the case of a
single symmetric axis, the center
coordinates in X direction of the
component cannot be obtained
accurately, so that a placement
deviation may occur. (Example:
“△” component at left). However,
because this deviation amount has
reproducibility, it may be used if a
placement offset is entered.
In case the component has no
symmetry, this shape is not effective.
(Example: “x” component at left).
Flexible 3
The XY width deviation amount is calculated by using
the data close to the minimum with of the component.
The angle is calculated by the inclination of one side of
X direction of the component.
Odd-shape component
It is possible to recognize many
odd-shape components. However,
if the upper/lower part of the
component is round, the angle
deviation amount may be unstable.
(Because only one side can be used
to obtain the angle)
No Definition
The system rotates a component that is ready to be
picked up by the placement angle, and then places it
on a board.
Components that cannot be centered
with laser stably (extremely thin
components whose thickness does
not conform to the specifications):
the system places such a component
without centering it. Therefore, the
placement position is affected by the
pick-up position.
CAUTION
The initial setting of the “Comp Shape” is determined according to the
component type. Normally, if you change this initial value, an error may
occur more frequently. Never change the initial value except for the
special component.
(5) Nozzle display
The image, the outer dimensions, the applicable component size of a nozzle are
displayed here.