00191504-01.pdf - 第244页
5.V izuális funkci ók Has ználati utas ítás a SIPL ACE 80S-20/F4/F4-6/F 5 tipus hoz 5.2 Ny áklap vizuáli s -rend szer 98/03- as kiad ás az SR.404.x x szoftv erverziót ól 5-20 - a képernyõ számá ra - 4 kamera beme net szá…
Használati utasítás a SIPLACE 80S-20/F4/F4-6/F5 tipushoz 5.Vizuális funkciók
98/03-as kiadás az SR.404.xx szoftververziótól 5.7 Útmutató a házformák leírásához
5-19
1\iNODSYL]XiOLVUHQGV]HU
A nyáklap vizuális rendszer a nyáklap pontos helyzetét jeleníti meg jelzések mérésével és
az x- és y-irányban történõ elmozdulást adja meg, valamint az elfordulási szöget a nyáklap
szállítási irányhoz viszonyítva és a nyáklapok eltérését. Selejt jelzéseket (“Ink-pontokat”) is
felvesz és értékel a nyáklap vizuális rendszer.
5HQGV]HUOHtUiVD
A nyáklap vizuális rendszer a nyáklap helyzet felismerés számára a következõkbõl áll
$Q\iNODSIHOLVPHUpVRSWLNDLUHQGV]HUH
Minden portál rendekezik egy saját nyáklap felismerõ rendszerrel (lásd 5.1.2 ábra, 5 - 5. old-
al).
UTALÁS:
A nyáklap helyzetfelismerést csak az 1 portál végzi.
9L]XiOLVNLpUWpNHOpVLHJ\VpJ
Minden automatánál a vezérlés-betoló egységben egy kiértékelõ egység került elhely-
ezésre, a nyáklap és elem helyzetfelismerés céljából (lásd 5.1.4 ábra, 5.1.7 ábra és az
5.1.10 ábra).
7iEOi]DW
Egy CCD-kamera (SONY XC75-kamera) integrált leképezési és megvilágítási optikával ké-
pezi az optikai nyáklap helyzetfelismerõ rendszert. A nyáklap modul nézet-felülete 5,7 mm
x 57 mm. A nézetfelületek méretein belül egy keresõt a helyzetet és a nagyságot illetõen sz-
abadon lehet programozni. A leképezési optika egy speciális mérõoptika amely a mérési
hibákat a nyáklap görbületek alapján messzemenõen kompenzálja. A megvilágítás csak a
jelölések felvétele alatt kerül bekapcsolásra.
A vizuális kiértékelési egység (MVS) egy egylemezes rendszer a VME-standard szerint. A
hardver a következõkbõl áll:
$] 096 0RWKHUERDUGEyO DPHO\ YL]XiOLV SURFHVV]RURNNDO UHQGHONH]LN pV D PHW V]pVSRQWL
FVDWODNR]iVRNEyO
A lemez hátoldalán a következõk találhatók
- Dugasz csatlakozás a VME-busz számára és
- nagysebességûkommunikáció (HS
3
L)
A lemez elülsõ oldalán csatlakozó dugaszok találhatók
$XWRPDWD 1\iNODSNDPHUD 096NLpUWpNHO}UHQGV]HU
80S-20 (2 portál) 2 1
80F
4
(1 portál) 1 1
80F
4
-6 (1 portál) 1 1
80F
5
(1 portál) 1 1
5.Vizuális funkciók Használati utasítás a SIPLACE 80S-20/F4/F4-6/F5 tipushoz
5.2 Nyáklap vizuális-rendszer 98/03-as kiadás az SR.404.xx szoftververziótól
5-20
- a képernyõ számára
- 4 kamera bemenet számára
- két széria metszéspont (RS232 vagy RS422) és a kijelzõ LED-ek számára
- a CPU számára
- a vizuális processzor számára
- a kamera-bemenet számára
- a képernyõ kijelzõ számára
A “RESET” és “ABORT” kapcsolókat a kijelzõ LED-ek alatt találjuk meg.
- Az MVS kamera interface-bõl (hordozólemez) max. négy CCD-kamera számára
0 V]DNLDGDWRN
)XQNFLyNOHtUiVD
A beültetés elõtt a nyáklap helyzete, elfordulási szöge és eltérse (nyílása) a jelölések
pozíciói alapján kerülnek a nyáklap vizuális rendszerben kimutatásra. A terv értékektõl való
eltéréseket korrekturaként beszámítják az elemek beültetõ pozícióiba.
A nyáklapokra legalább két jelölést kell felvinni, hogy a rendszer a nyáklap pozíció
eltéréseket és a nyáklap forgásszögeket felismerhesse. Három jelölõ pont felvitelekor plusz
információkat kapunk a nyáklapok és a nyáklap layoutok eldeformálódásáról.
)XQNFLyNPHQHWH
Mielõtt a nyáklap felismerés számára jelzést használunk, ezeket “teachelni” kell, azaz a
jelölés strukturális paramétereit a minta számára be kell adni a nyáklap vizuális rendszerbe.
- A portálon elhelyezett nyáklap vizuális kamerával és a vizuális programmal a jelölési
struktúra teachelésre kerül. A vizuális kiértékelési rendszer digitális feldolgozási módszerrel
kimutatja a szignifikáns jelölési struktúra paramétereket.
- A mérési eljárás két lépcsõben történik:
- 2D-mintakeresõ eljárás (2-dimenziónális eljárás) a nagy raszterben és a jelölés
koordináták elõzetes meghatározása
- D-mintakeresõ eljárás (1-dimenzionális eljárás) a jelölések pontos helyzetmeghatározása
számára.
.DPHUDWtSXV 621<;&
A kamera adatai: Kamera 768 (H) x 494 (V), kép 640 (H) x 484 (V)
Nézet-mezõ: 5,7 mm x 5,7 mm
Megvilágítási módszer: Felgyulladó eljárással (a mérési folyamatban kerül aktiválásra
Képfeldolgozás: Korrelációs elv, szürke értékrendszer
Processzor ciklusidõ: <200 msec
Képernyõ: RGB - monitor (VGA-modus) 640 x 484 állomás számítógépes
felbontás
Jelölések: Könyvtár memória kitejesztett max. 255 márkadefinició (jelölés)
számára
Használati utasítás a SIPLACE 80S-20/F4/F4-6/F5 tipushoz 5.Vizuális funkciók
98/03-as kiadás az SR.404.xx szoftververziótól 5.7 Útmutató a házformák leírásához
5-21
A 2D-mintakeresõ eljárásnál a mintafelismerõ ablak kisebb területekre kerül felosztásra (Mo-
zel). A moxelek (mozaikfelbontás) felbontott mezõk, mint pl. a 16 x 16, 8 x 8, stb. felbontá-
sok. Minél alacsonyabb a pontszám, annál nagyobb a felbontás és annál alacsonyabb a
keresõ sebesség.
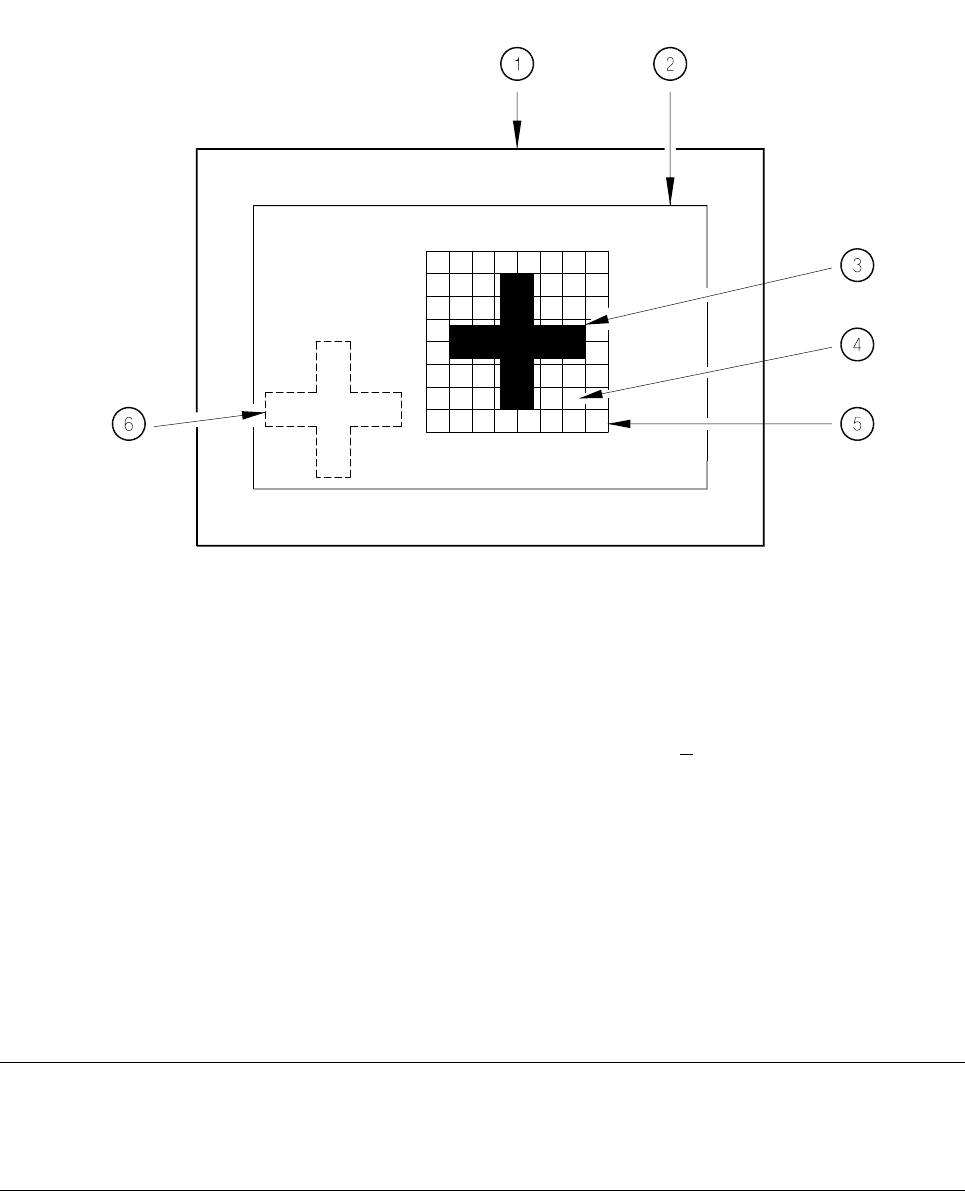
iEUD $NDPHUDOiWyWpUPDJ\Ui]iVDNH
resõmezõ és a mintakeresõ ablak
0DJ\DUi]DWD]iEUiKR]
1 A kamera látómezõje 2 Keresõ mezõ < kamera látómezõ
3 Referencia jelölés (ebben a mezõben keresi a jelölést)
5 Mintakeresõ ablak 4 Moxel = pontmezõ, pl. 16 x 16-os pontfel
(tartalmazza a referencia jelölést) bontás
6 A keresendõ jelölés
A mintakeresõ ablak mozaik lépésenként halad a keresõmezõn keresztül. Minden moxel
szürke értéke kiszámításra kerül a referencia jelöléseknél. Ez a redukált adat struktúra ele-
gendõ információt tartalmaz a referencia jelölés nagybani struktúrájáról és helyzetérõl.
UTALÁS
A keresõ-ablakot olyan kicsinek válasszuk meg, hogy magas keresési sebességet tudjunk
elérni. Azonban elég nagy legyen ahhoz, hogy a jelölést egyértelmûen tudjuk azonosítani.
A pontos minta és helyzet megállapításhoz a jelöléseknél az 1D-mintakeresõ eljárást alkal-
mazzuk. A jelölés képes soronkénti és oszloponkénti felbontásban jelenik meg és a szürke
értékek egy soron és egy oszlopon belül göngyölítésre kerülnek. Ezt a folyamatot egy kettõs
kereszt segítségével teszi láthatóvá a következõ kép.