00191504-01.pdf - 第245页
Használ ati utasí tás a SIPLAC E 80S-20/F4 /F4-6/F5 tipushoz 5.V izuális funkci ók 98/03-as kiadás az SR.40 4.xx szoftverv erziótól 5.7 Út mut ató a ház formák le írásáh oz 5-21 A 2D-mi nt akeresõ e l járá snál a mint af…
5.Vizuális funkciók Használati utasítás a SIPLACE 80S-20/F4/F4-6/F5 tipushoz
5.2 Nyáklap vizuális-rendszer 98/03-as kiadás az SR.404.xx szoftververziótól
5-20
- a képernyõ számára
- 4 kamera bemenet számára
- két széria metszéspont (RS232 vagy RS422) és a kijelzõ LED-ek számára
- a CPU számára
- a vizuális processzor számára
- a kamera-bemenet számára
- a képernyõ kijelzõ számára
A “RESET” és “ABORT” kapcsolókat a kijelzõ LED-ek alatt találjuk meg.
- Az MVS kamera interface-bõl (hordozólemez) max. négy CCD-kamera számára
0 V]DNLDGDWRN
)XQNFLyNOHtUiVD
A beültetés elõtt a nyáklap helyzete, elfordulási szöge és eltérse (nyílása) a jelölések
pozíciói alapján kerülnek a nyáklap vizuális rendszerben kimutatásra. A terv értékektõl való
eltéréseket korrekturaként beszámítják az elemek beültetõ pozícióiba.
A nyáklapokra legalább két jelölést kell felvinni, hogy a rendszer a nyáklap pozíció
eltéréseket és a nyáklap forgásszögeket felismerhesse. Három jelölõ pont felvitelekor plusz
információkat kapunk a nyáklapok és a nyáklap layoutok eldeformálódásáról.
)XQNFLyNPHQHWH
Mielõtt a nyáklap felismerés számára jelzést használunk, ezeket “teachelni” kell, azaz a
jelölés strukturális paramétereit a minta számára be kell adni a nyáklap vizuális rendszerbe.
- A portálon elhelyezett nyáklap vizuális kamerával és a vizuális programmal a jelölési
struktúra teachelésre kerül. A vizuális kiértékelési rendszer digitális feldolgozási módszerrel
kimutatja a szignifikáns jelölési struktúra paramétereket.
- A mérési eljárás két lépcsõben történik:
- 2D-mintakeresõ eljárás (2-dimenziónális eljárás) a nagy raszterben és a jelölés
koordináták elõzetes meghatározása
- D-mintakeresõ eljárás (1-dimenzionális eljárás) a jelölések pontos helyzetmeghatározása
számára.
.DPHUDWtSXV 621<;&
A kamera adatai: Kamera 768 (H) x 494 (V), kép 640 (H) x 484 (V)
Nézet-mezõ: 5,7 mm x 5,7 mm
Megvilágítási módszer: Felgyulladó eljárással (a mérési folyamatban kerül aktiválásra
Képfeldolgozás: Korrelációs elv, szürke értékrendszer
Processzor ciklusidõ: <200 msec
Képernyõ: RGB - monitor (VGA-modus) 640 x 484 állomás számítógépes
felbontás
Jelölések: Könyvtár memória kitejesztett max. 255 márkadefinició (jelölés)
számára
Használati utasítás a SIPLACE 80S-20/F4/F4-6/F5 tipushoz 5.Vizuális funkciók
98/03-as kiadás az SR.404.xx szoftververziótól 5.7 Útmutató a házformák leírásához
5-21
A 2D-mintakeresõ eljárásnál a mintafelismerõ ablak kisebb területekre kerül felosztásra (Mo-
zel). A moxelek (mozaikfelbontás) felbontott mezõk, mint pl. a 16 x 16, 8 x 8, stb. felbontá-
sok. Minél alacsonyabb a pontszám, annál nagyobb a felbontás és annál alacsonyabb a
keresõ sebesség.
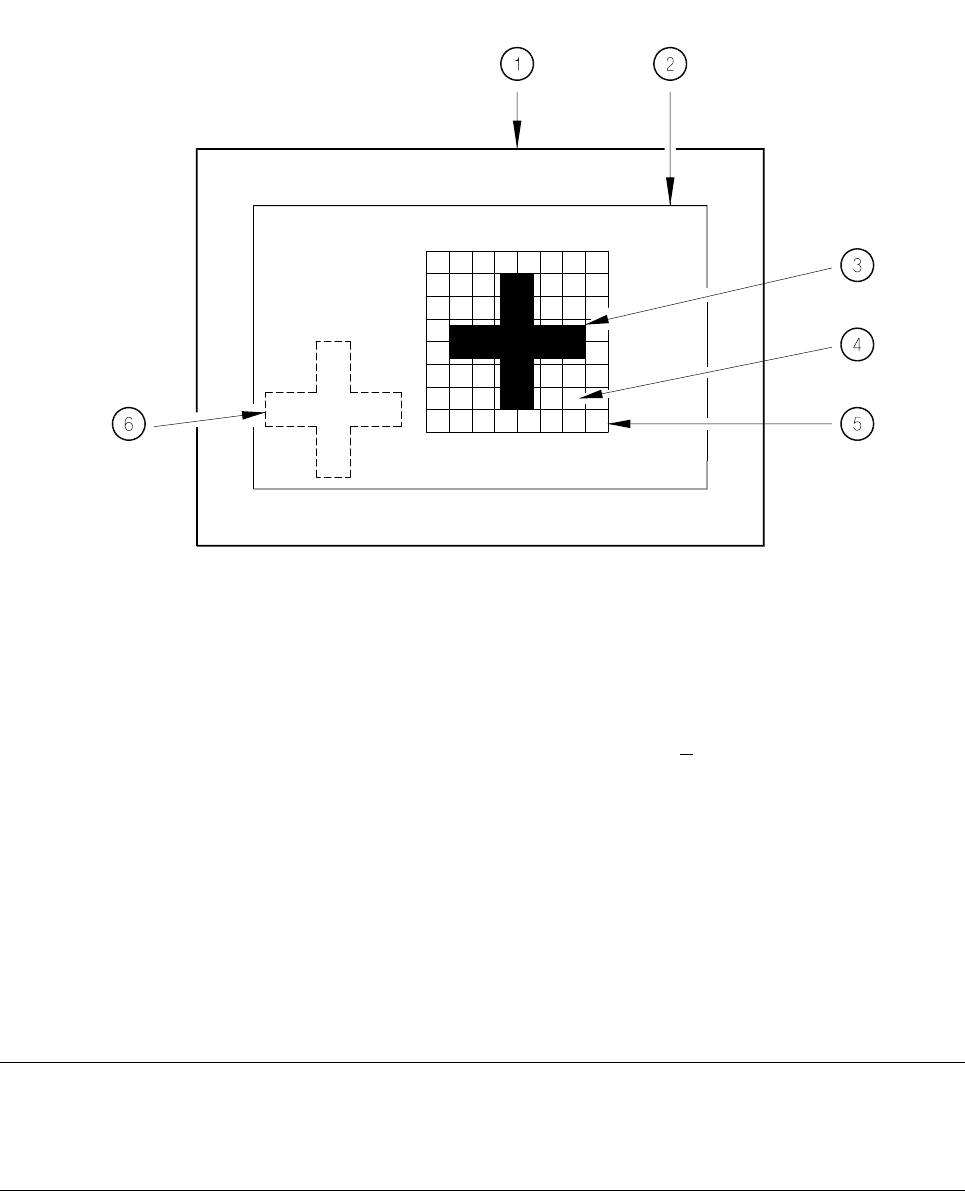
iEUD $NDPHUDOiWyWpUPDJ\Ui]iVDNH
resõmezõ és a mintakeresõ ablak
0DJ\DUi]DWD]iEUiKR]
1 A kamera látómezõje 2 Keresõ mezõ < kamera látómezõ
3 Referencia jelölés (ebben a mezõben keresi a jelölést)
5 Mintakeresõ ablak 4 Moxel = pontmezõ, pl. 16 x 16-os pontfel
(tartalmazza a referencia jelölést) bontás
6 A keresendõ jelölés
A mintakeresõ ablak mozaik lépésenként halad a keresõmezõn keresztül. Minden moxel
szürke értéke kiszámításra kerül a referencia jelöléseknél. Ez a redukált adat struktúra ele-
gendõ információt tartalmaz a referencia jelölés nagybani struktúrájáról és helyzetérõl.
UTALÁS
A keresõ-ablakot olyan kicsinek válasszuk meg, hogy magas keresési sebességet tudjunk
elérni. Azonban elég nagy legyen ahhoz, hogy a jelölést egyértelmûen tudjuk azonosítani.
A pontos minta és helyzet megállapításhoz a jelöléseknél az 1D-mintakeresõ eljárást alkal-
mazzuk. A jelölés képes soronkénti és oszloponkénti felbontásban jelenik meg és a szürke
értékek egy soron és egy oszlopon belül göngyölítésre kerülnek. Ezt a folyamatot egy kettõs
kereszt segítségével teszi láthatóvá a következõ kép.
5.Vizuális funkciók Használati utasítás a SIPLACE 80S-20/F4/F4-6/F5 tipushoz
5.2 Nyáklap vizuális-rendszer 98/03-as kiadás az SR.404.xx szoftververziótól
5-22
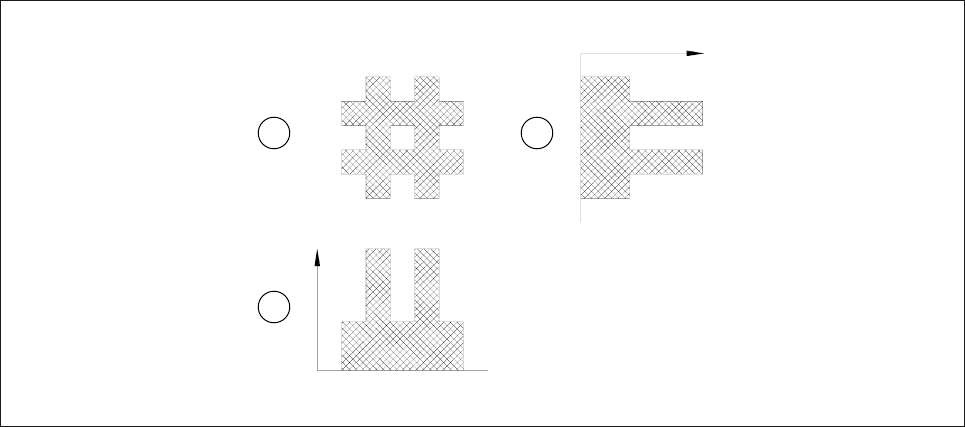
iEUD 6RUpVRV]ORSSURILOHJ\NHWW}VNHUHV]WQpO
0DJ\DUi]DWD]iEUiKR]
1 Jelzés
2 A szürke értékek összege oszloponként: oszlop profil
3 A szürke értékek összege soronként: sor-profil
- A horizontális, ill. vertikális profilokból a jelölés pozíciója pontosan meghatározásra
kerül. A teachelés után a nyert jelölés struktúra paramétereket a sorszámítógép tárolja.
- Ezután a tárolt modell tesztelésre kerül. Ezzel kapcsolatban a portál a nyáklap kamerát a
keresõ mezõ mind a négy sarkába viszi a nyáklap fölött (worst case). A vizuális rendsz-
ernek ebben a tesztben a jelölést négyszer kell újból azonosítania.
- Végül pedig minden egyes jelölés koordinátáit (legalább kettõt) manuálisan be kell
jegyezni az “NU”-adattárba, vagy a CAD-adattárból az NU-adattárba át kell ezeket venni.
Ezzel a beültetendõ nyáklapok számára modellként rögzítetté válnak a rendszerben a
koordináták és a jelölõ struktúra paraméterek.
- A beültetési folyamatban azután ismételten az elõbb leírt képfeldolgozási módszerrel a
2D-vel és az 1D eljárással kerülnek a jelölõ paraméterek rögzítésre. A mintakeresõ abla-
kok moxel lépésenként vezetjük a keresõmezõn át és a lehetõ legnagyobb átfedést ker-
essük meg a referencia jelölések és a nyáklap keresõ jelzések szürke értékeinél
(korrelációs eljárás). A referencia és keresõ jelölések egyezésekor a korreláció maximá-
lis.
- Amennyiben a jelölést megtaláltuk, akkor nagyon pontos geometriai és koordináta
értékek meghatározásával indul a jelölés az 1D mintakeresõ eljárásban. A pontos
jelölési formákat és koordinátákat a mindenkori oszlop és sor profil adja meg a kor-
relációs eljárás alá (lásd 5.2.2 ábra). A nyert koordinátákból meghatározásra kerül a
helyzet, az elfordulás és a nyáklapok eltérése.
- A selejt jelölés (inkpontok) ugyancsak a fent leírt módszer szerint történnek és kerülnek
kiértékelésre.
1 2
3