S 20 Series Maintenance I.pdf - 第153页
S 20 系列维修培训指南 I 2000 年 6 月版 3 机器回参考点 13 3. 1 .8 3. 1 .8 3. 1 .8 3. 1 .8 Z 轴回参考点 完成 Z 轴回参考点 完成 Z 轴回参考点 完成 Z 轴回参考点 完成 Fig. 3. 1 - 8 Z 轴回参考点 完成 Z 轴 运至最高位置 的终点 档块 Star 旋 转轴转到 2500 个 Digit 在 此 位置上 段位器 滚珠 轴 承 正 好处 于 Z 爪 和 滑槽之 …
2000 年 6 月版 S 20 系列维修培训指南 I
3 机器回参考点
12
3.1.7
3.1.73.1.7
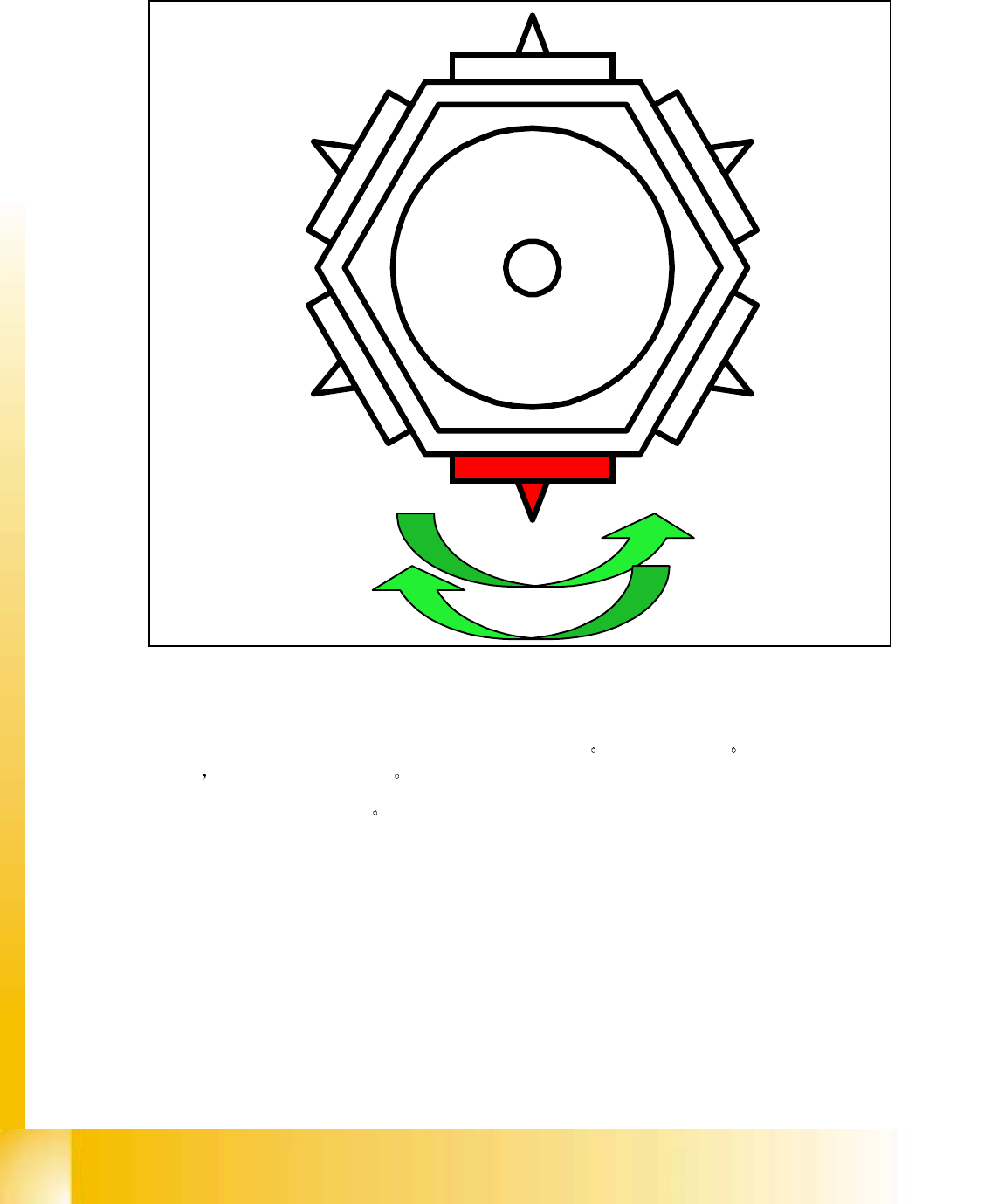
3.1.7 初始化 Star 旋转轴 ( 在 Star 旋转轴回参考点 )
初始化 Star 旋转轴 ( 在 Star 旋转轴回参考点 )初始化 Star 旋转轴 ( 在 Star 旋转轴回参考点 )
初始化 Star 旋转轴 ( 在 Star 旋转轴回参考点 )
Fig. 3.1 - 7 初始化 ( 回参考点 )Star 旋转轴
Star 旋转轴以逆时针方向转动到增量轴编码器的零点脉冲 装入零点校正值 旋转轴以顺时针方
向旋转
直至计数器显示 0 为止
1 号段位器现在处于 贴片位置
3
6
1
4
5
2
S 20 系列维修培训指南 I 2000 年 6 月版
3 机器回参考点
13
3.1.8
3.1.83.1.8
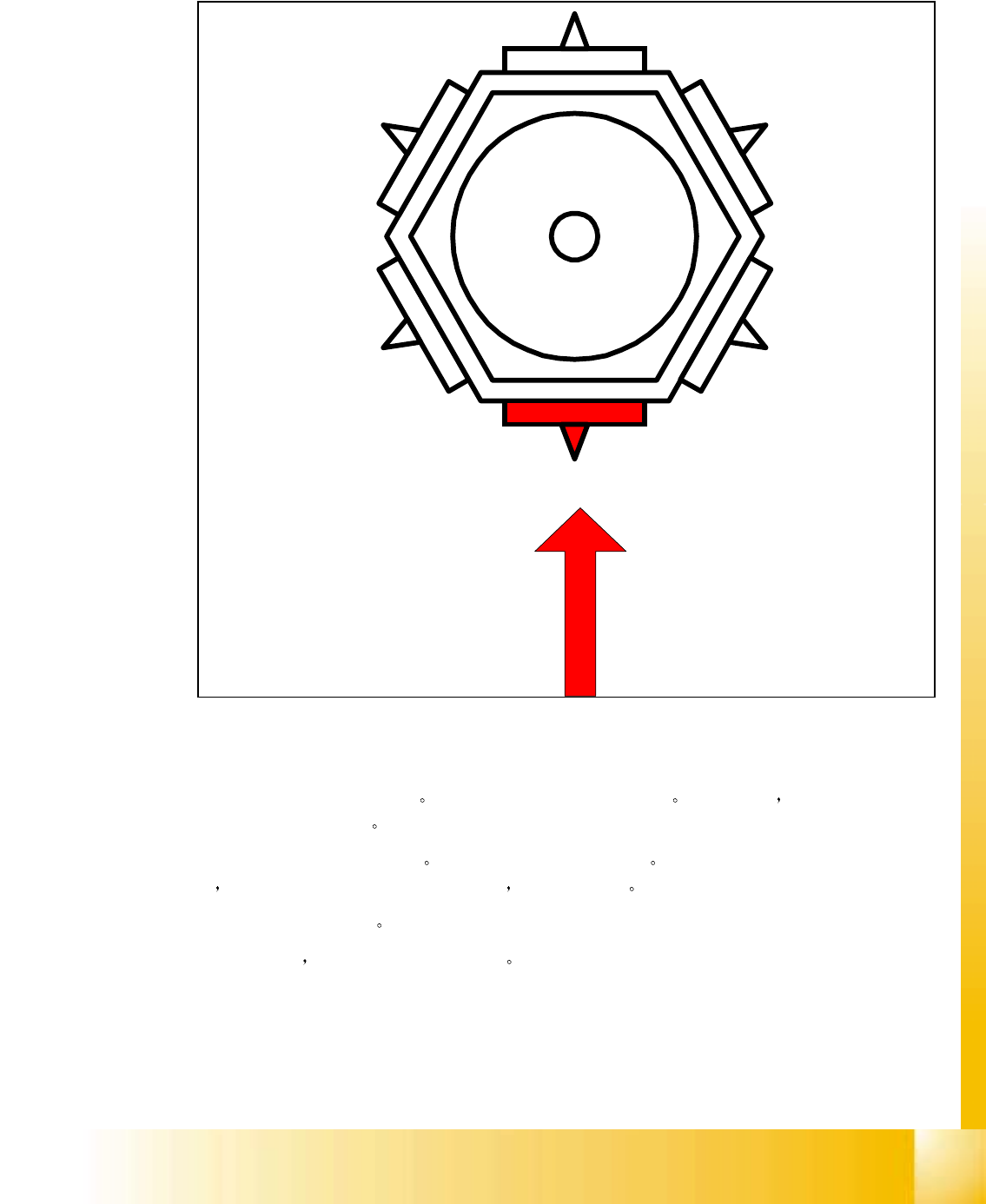
3.1.8 Z 轴回参考点完成
Z 轴回参考点完成Z 轴回参考点完成
Z 轴回参考点完成
Fig. 3.1 - 8 Z 轴回参考点完成
Z 轴运至最高位置 的终点档块 Star 旋转轴转到 2500 个 Digit 在此位置上 段位器滚珠轴承正
好处于 Z 爪和滑槽之间
z 轴运动到上部终点处并读数 运动之下部终点处也是如此 把这两次读数结果的平均值计算出
来
加上一个负号作为参考点的 值 (ZPC) 装入轴控制器
Star 旋转轴返回参考点
用这个新数值 Z 轴开始另一次回参考点
3
6
1
4
5
2
2000 年 6 月版 S 20 系列维修培训指南 I
3 机器回参考点
14
3.1.9
3.1.93.1.9
3.1.9 初始化
初始化初始化
初始化 dp
dpdp
dp 轴 ( 在
轴 ( 在轴 ( 在
轴 ( 在 dp
dpdp
dp 轴回参考点 )
轴回参考点 )轴回参考点 )
轴回参考点 )
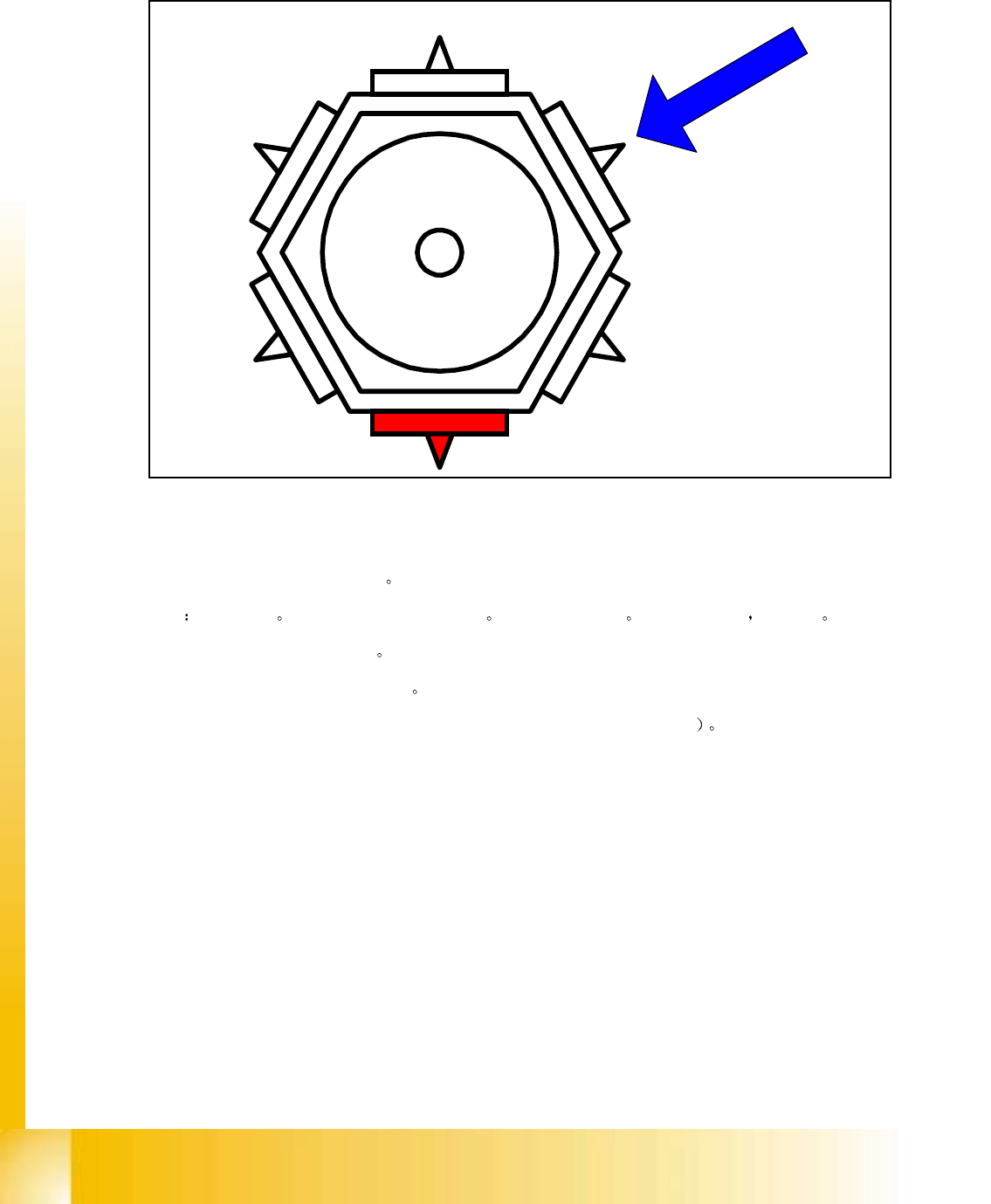
Fig. 3.1 - 9 初始化 dp 轴 ( 在 dp 轴回参考点 )
在 dp 站内的段位器转到参考点
顺序 dp 站转入 轴开始运动并寻找零脉冲 检查零脉冲故障 在终止信号后 dp 转出
摆入 / 出功能由 CAN 总线控制
光栅读数盘轴旋转由轴控制器控制
dp 轴零点校正值始终为 0( 因为多达12 个的段位器都是由 1 个马达操作
3
6
1
4
5
2