S 20 Series Maintenance I.pdf - 第433页
2000 年 6 月版 S 2 0 系列维修培训指南 I 8 校准 84 8.7. 1 8 8.7. 1 8 8.7. 1 8 8.7. 1 8 存储机器数据 存储机器数据 存储机器数据 存储机器数据 一 旦 机器的校准 完成 后 所 确定的数据必 须存储 注意 映射 校准时所 得 数据 自动存储 . Fig. 8.7 - 52 有 设置 菜单的主视 图 ! 主视图 => 设置 设置 设置 设置菜单 => 存储机器数据 存储…
S 20 系列维修培训指南 I 2000 年 6 月版
8 校准
83
!
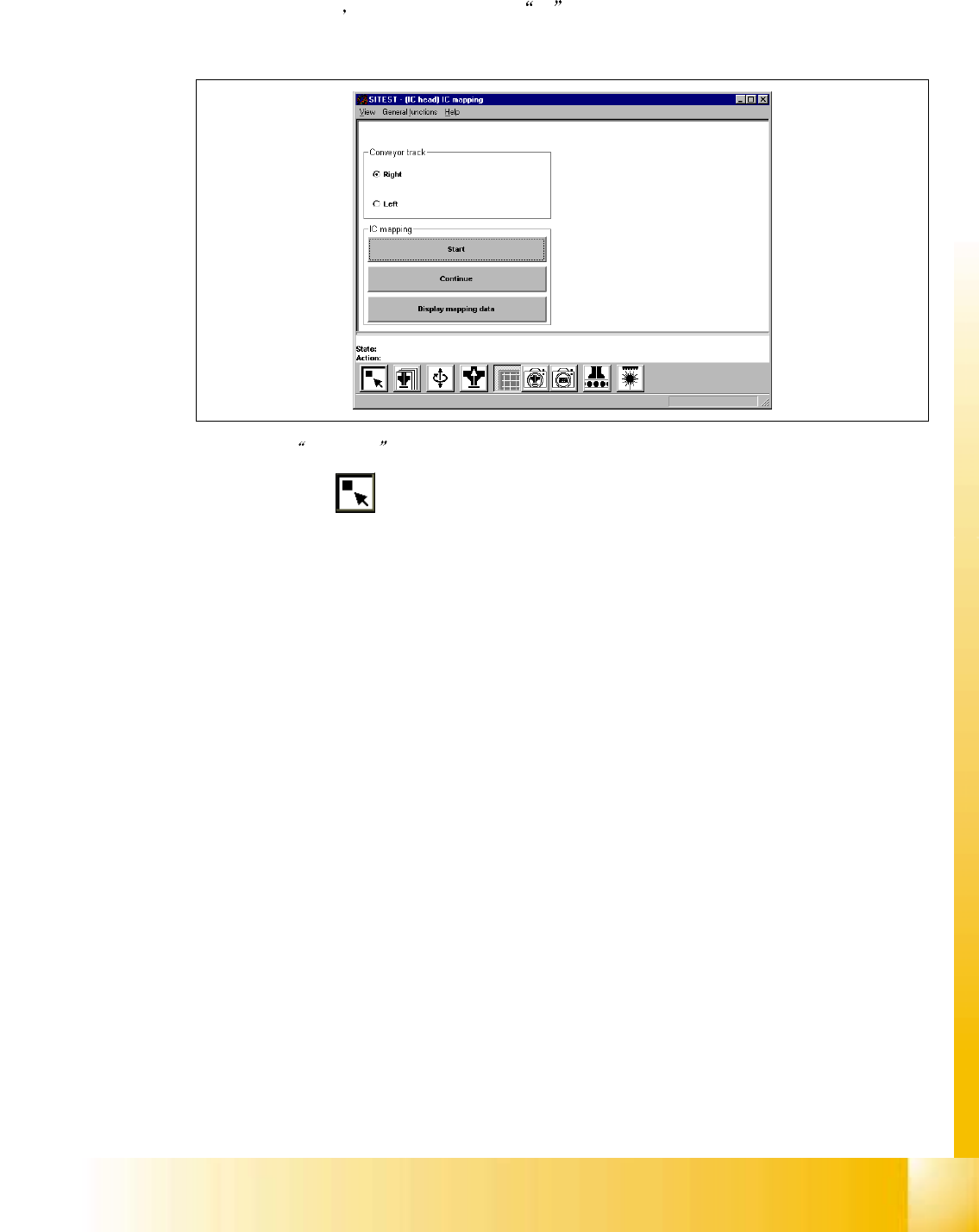
把铝映射校准测试板插入右传送 导轨的中心传送导轨内 => 起动 => OK
OKOK
OK
!
对于双传送导轨 启动左传送导轨轨道 左 单选按钮 => 起动
起动起动
起动按钮
!
把铝映射校准测试板插入左传送 导轨的中心传送导轨内 => 起动 => OK
OKOK
OK
Fig. 8.7 - 51 IC 映射校准 视图
=> 回到主视图 8
2000 年 6 月版 S 20 系列维修培训指南 I
8 校准
84
8.7.18
8.7.188.7.18
8.7.18 存储机器数据
存储机器数据存储机器数据
存储机器数据
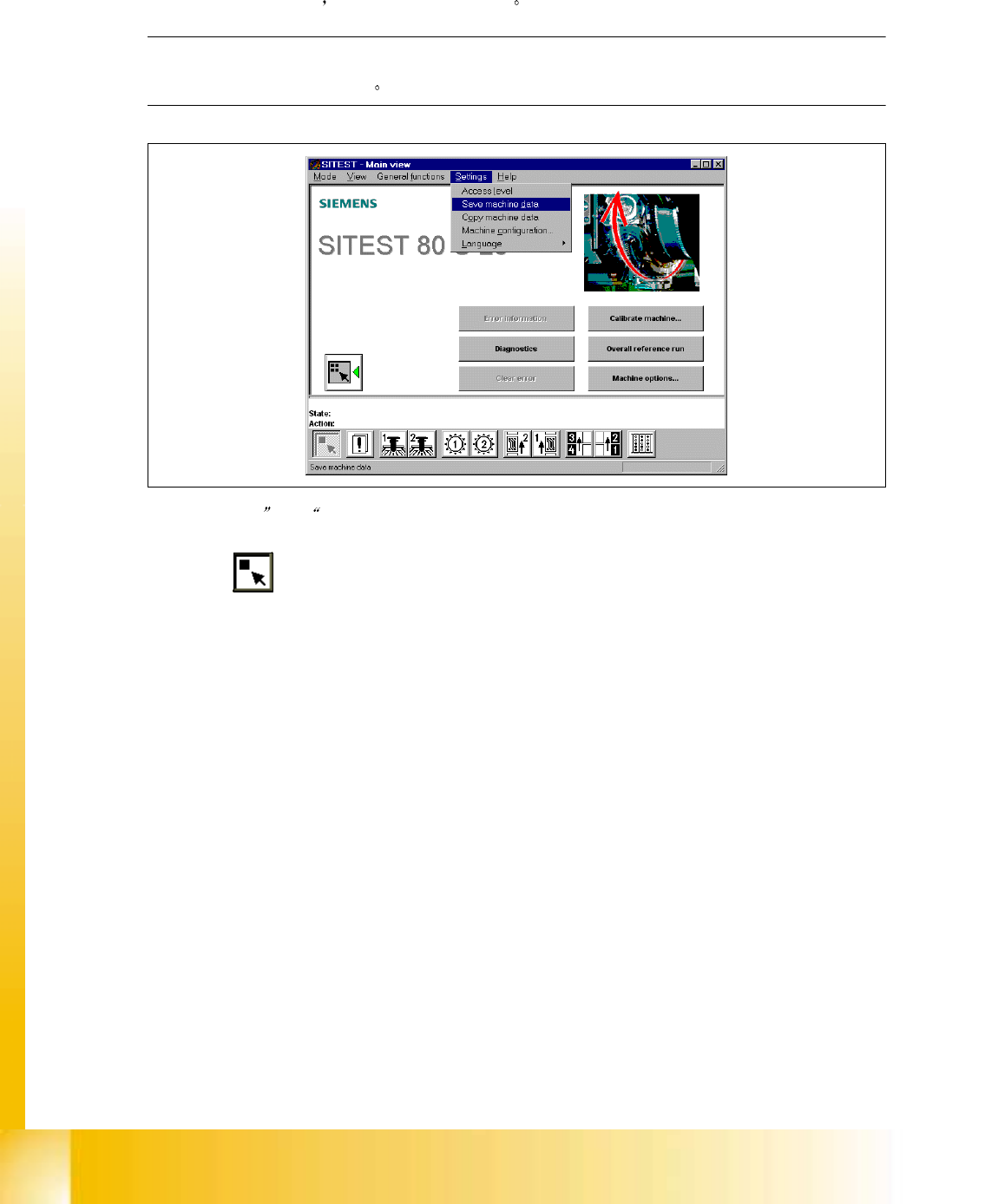
一旦机器的校准完成后 所确定的数据必 须存储
注意
映射校准时所得数据自动存储
.
Fig. 8.7 - 52 有 设置 菜单的主视图
!
主视图 => 设置
设置设置
设置菜单 => 存储机器数据
存储机器数据存储机器数据
存储机器数据
S 20 系列维修培训指南 I 2000 年 6 月版
8 校准
85
8.8
8.88.8
8.8 校准功能综述
校准功能综述校准功能综述
校准功能综述
8.8.1
8.8.18.8.1
8.8.1 PCB 照相机校准的理论
PCB 照相机校准的理论PCB 照相机校准的理论
PCB 照相机校准的理论
校准就是确定从 PCB 照相机的像素坐标系统到 SIPLACE 机器的公制坐标系统 (Ax, Bx, Cx and Ay,
By, Cy) 的矩阵转换
此矩阵是用来计算从照相机的像素排列取向的图象转到用于说明 SIPLACE机器上位置的公制坐标
系统
顺序
顺序顺序
顺序 :
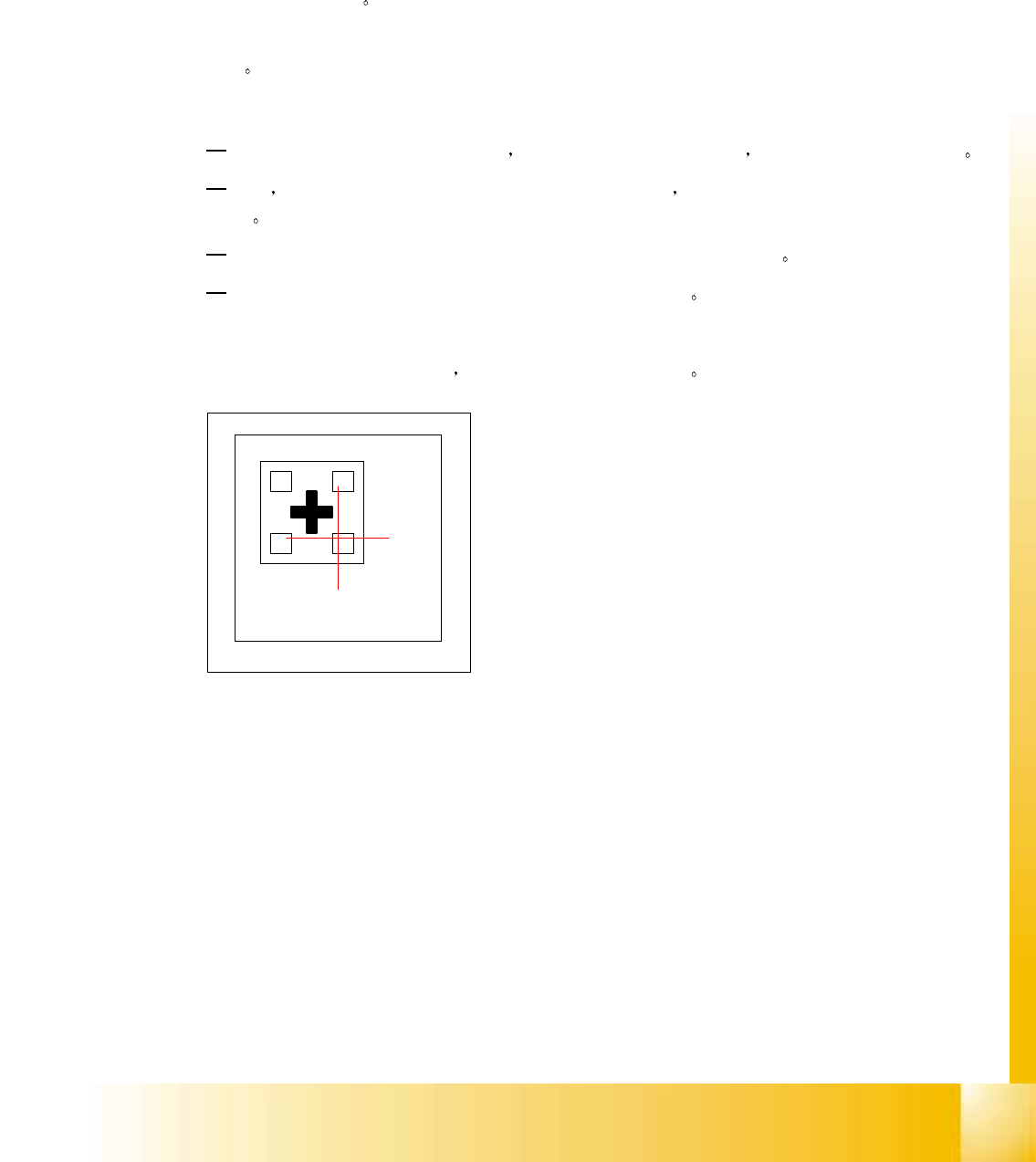
悬臂轴移动照相机到校准工具上 方 照相机摄取校准工具的中心 悬臂轴运动至此正确位置
现在 悬臂轴把照相机移动至 3 个规定的 ( 公制 ) 位置 然后照相机摄下校准工具的像素位
置
用矩阵方程可以在名义公制矩阵和实际像素矩 阵之间计算出修正矩阵
此照相机的 CCD 传感器安装角度按照机器的坐标系统确定
!
运动至校准工具的名义位置 并测量其到实际位置的偏移
8
Fig. 8.8 - 1 校准工具位置