S 20 Series Maintenance I.pdf - 第460页
S 20 系列维修培训指南 I 2000 年 6 月版 8 校准 111 8. 1 0 8. 1 0 8. 1 0 8. 1 0 防撞 板 的测试 防撞 板 的测试 防撞 板 的测试 防撞 板 的测试 8. 1 0. 1 8. 1 0. 1 8. 1 0. 1 8. 1 0. 1 评估 评估 评估 评估 8. 1 0. 1 . 1 8. 1 0. 1 . 1 8. 1 0. 1 . 1 8. 1 0. 1 . 1 防撞 板 的功 能 检…

2000 年 6 月版 S 20 系列维修培训指南 I
8 校准
110
8.9.2
8.9.28.9.2
8.9.2 测试数据
测试数据测试数据
测试数据
注意
进行任何调整以前 按压急停开关按钮
8.9.3
8.9.38.9.3
8.9.3 调整距离传感器的灵敏度
调整距离传感器的灵敏度调整距离传感器的灵敏度
调整距离传感器的灵敏度
!
把万用表连接到防撞板的 TP2 接地 和 TP10 信号 上
!
把 2 个 X 悬臂一起滑动直到它们之间的距离为 40mm 时为止
!
用距离传感器上的调节螺钉 设定电压至 7V 直流 + 0.1
穿过悬臂 2 X 轴水平横杠上的孔可以达到调节螺钉处
!
把两个 X 悬臂滑动分离直到它们之间的距离为 250 mm 时为止
万用表的电压读数必须是约 1V 直流 靠近
8.9.4
8.9.48.9.4
8.9.4 校准防撞板
校准防撞板校准防撞板
校准防撞板
!
把万用表连接到 Y0027 防撞板上 TP1 信号 插头上以及 TP2 接地 插头上
!
把两个悬臂靠近 直到缓冲垫靠在悬臂上为止
!
用电位计 R94 把电压调到 0V 直流 + 0.05V
!
移动两个悬臂直到它们分离至 250 mm + 5 mm
!
用电位计 R95 把电压 10V 直流 + 0.05V
!
重新检查 0V 设定值
!
如果数值偏移 重新校准
S 20 系列维修培训指南 I 2000 年 6 月版
8 校准
111
8.10
8.108.10
8.10 防撞板的测试
防撞板的测试防撞板的测试
防撞板的测试
8.10.1
8.10.18.10.1
8.10.1 评估
评估评估
评估
8.10.1.1
8.10.1.18.10.1.1
8.10.1.1 防撞板的功 能检查
防撞板的功能检查防撞板的功 能检查
防撞板的功能检查
准备
准备准备
准备
!
在悬臂 1 和悬臂 2 上进行头回参考点和悬臂回参考点各一次
测试
测试测试
测试
!
按压急停开关按钮
!
拔去相应的接近开关插头 见表
!
放开急停开关按钮
!
拧开 控制打开
SITEST MP: 8
!
选 悬臂行走数据 ==> 标准行走数据 ==> 回车 ==> ESC.
!
按照料台设定轴的位置
!
选 "Axes" 轴 ==> X- 或 Y- 轴 ==> "Axis continuous run" ( 轴连续运转 )==> "Set travel
distance"( 设定距离 ) ==> ESC ==> "Start continuous run" ( 开动连续运转 )==> 回车
!
在相应方向降低所选轴的速度
!
按压急停开关按钮
!
拔去接近开关插头 见表
!
按压防撞板上的 RESET 复位 按钮
!
放开急停开关按钮
!
拧开 "Control ON"( 控制打开
轴返回至正常模式
危险
在按压防撞板上的 RESET 按钮以前
必须先按压急停开关按钮
如果没有按压急停开关按钮 在按 RESET 后轴会立即行走
2000 年 6 月版 S 20 系列维修培训指南 I
8 校准
112
8.10.1.2
8.10.1.28.10.1.2
8.10.1.2 距离传感器的功能检查
距离传感器的功能检查距离传感器的功能检查
距离传感器的功能检查
准备
准备准备
准备
!
在悬臂 1 和 2 进行头回参考点和悬臂回参考点各一次
测试
测试测试
测试
!
把悬臂 1 移动至停放位置
!
按压急停开关按钮
!
在左防护盖的内侧贴上一张纸 在距离传感器的高度处
!
放开急停开关按钮并拧开 "Control ON"( 控制打开
SITEST MP: 8
!
选 "Gantry"( 悬臂 ) ==> "Gantry 2 active"( 悬臂 2 工作 ).
!
"Travel data gantry" ( 悬臂行走数据 )==> "Travel data standard" ( 标准行走数据 )==> 回
车 ==> ESC.
!
"Axes" 轴 ==> "Y-axis" Y 轴 ==> "Axis continuous run" ( 轴连续运转 )==> "Set
travel distance" ( 设定行走距离 )==>
250 000 - 400 000 dgts. ==> ESC ==> "Start continuos run"( 开动连续运转 ) ==> 回车
悬臂 2 一到达这张纸时 距离传感器必须立即工作 即机器停止
!
现在不要忘记这张试验纸拿下来
!
按压急停开关按钮
!
按压防撞板上的 RESET 按钮
!
放开急停开关按钮 并按压 "Control ON"( 控制打开 )
悬臂 2 慢慢移动就位 而连续运转会重新开始
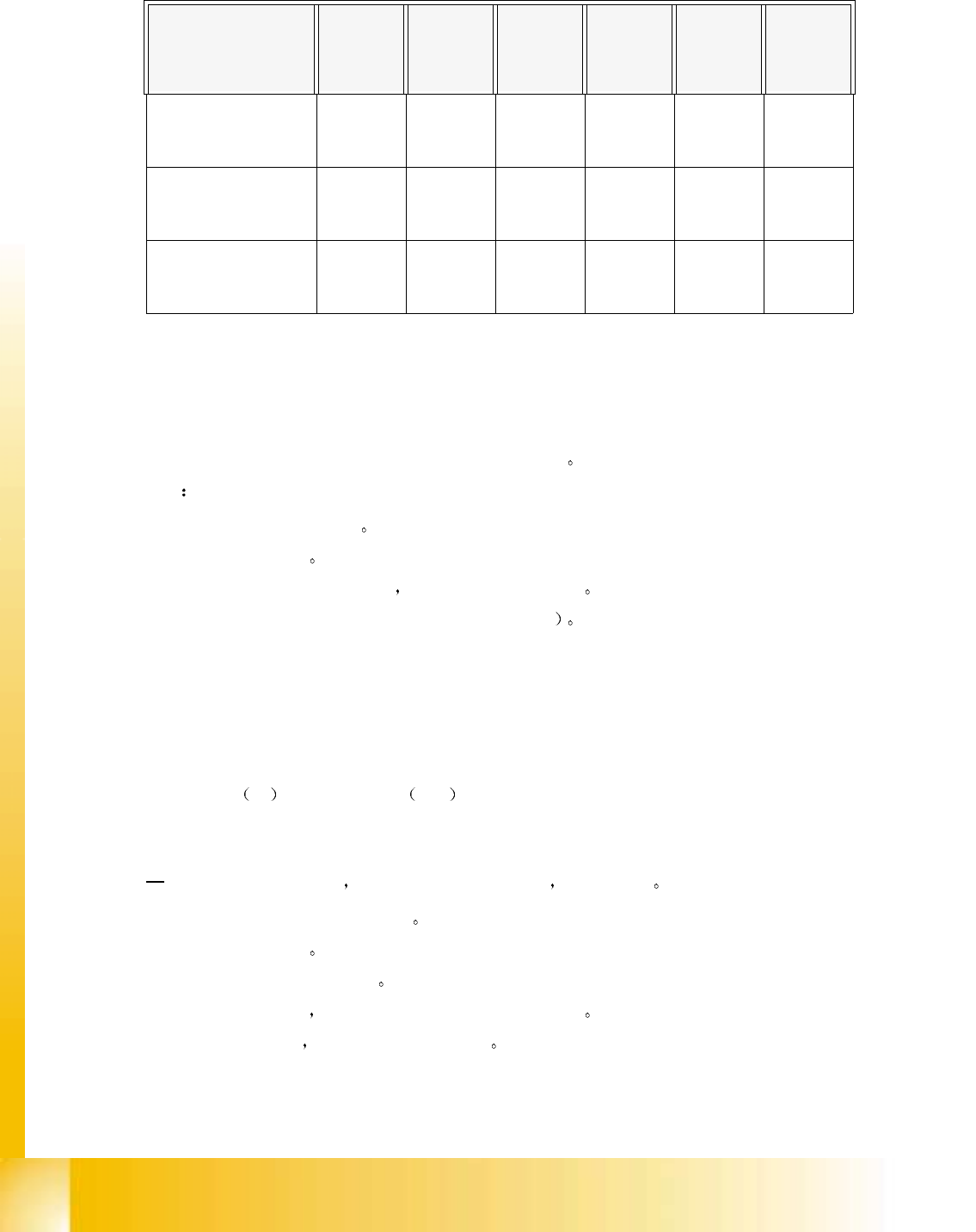
悬臂
悬臂悬臂
悬臂 1
X- 轴
轴轴
轴
悬臂
悬臂悬臂
悬臂 1
Y- 轴
轴轴
轴
接近开关
接近开关接近开关
接近开关
1
悬臂
悬臂悬臂
悬臂 1
Y-- 轴
轴轴
轴
接近开关
接近开关接近开关
接近开关
2
悬臂
悬臂悬臂
悬臂 2
X- 轴
轴轴
轴
悬臂
悬臂悬臂
悬臂 2
Y- 轴
轴轴
轴
接近开关
接近开关接近开关
接近开关
1
悬臂
悬臂悬臂
悬臂 2
轴
轴轴
轴 Y-
接近开关
接近开关接近开关
接近开关
2
在板上
X16
C 0005
X5
C0004
X6
C0004
X16
C0005
X5
C0004
X6
C0004
开始位置
目标位置
100.000
300.000
350.000
500.000
350.000
500.000
100.000
300.000
250.000
400.000
250.000
400.000
降低轴压
行走方向的速度
正 正 负 负 负 正