S 20 Series Maintenance I.pdf - 第450页
S 20 系列维修培训指南 I 2000 年 6 月版 8 校准 101 8.8. 1 6 8.8. 1 6 8.8. 1 6 8.8. 1 6 旋转 头校准图 旋转 头校准图 旋转 头校准图 旋转 头校准图 额 外考 虑 的 是 用 带 有 高度精 密玻璃 板 的 映射 校准操作 取得之 安 置位 置的 特殊偏 移 存储在 MAPP _1 1.MA ...MAPP2 2.MA 以 及 在机器 安装 期 间 用 精 确的校准或用 MFU…
2000 年 6 月版 S 20 系列维修培训指南 I
8 校准
100
8.8.15
8.8.158.8.15
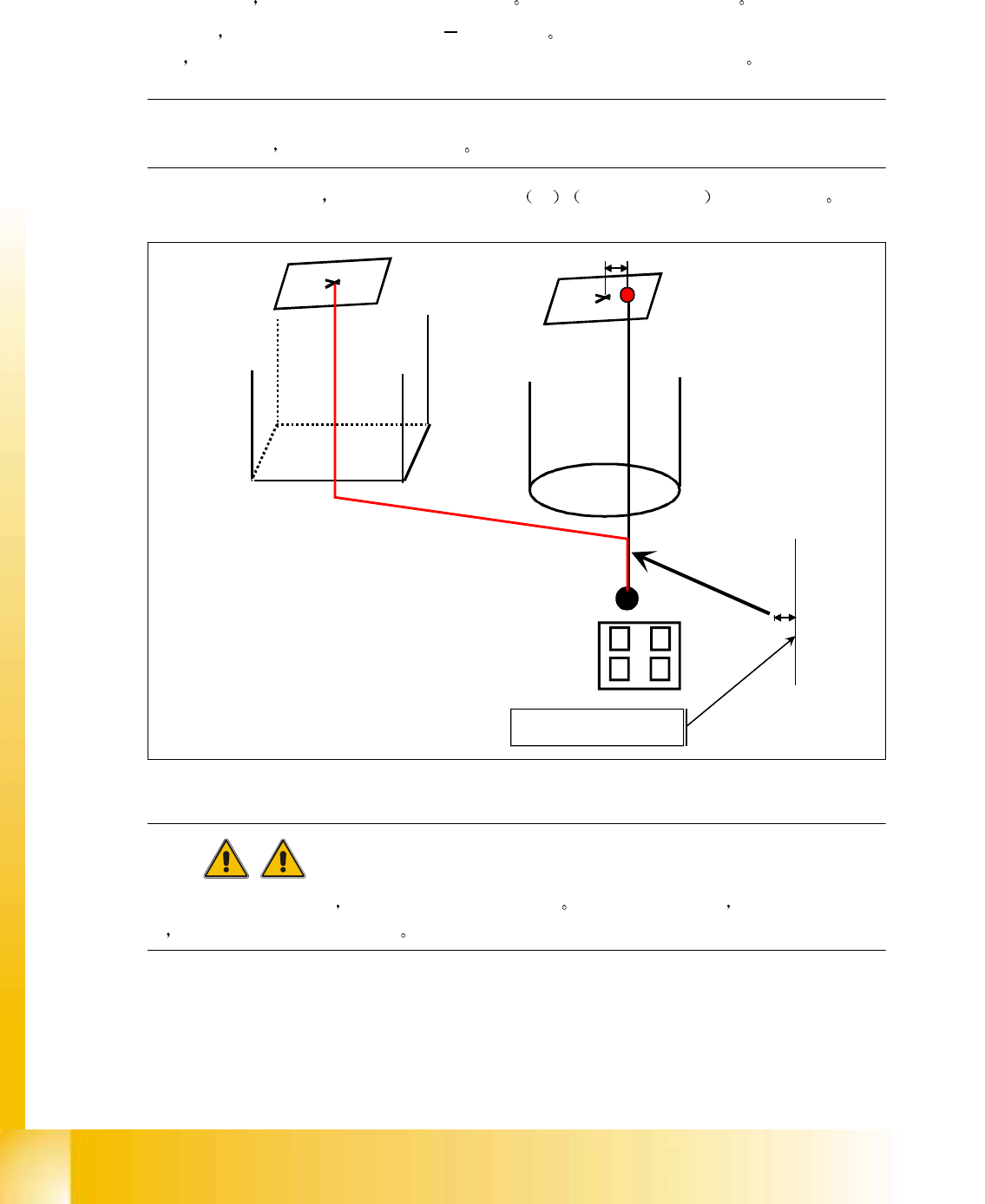
8.8.15 校准机器零点
校准机器零点校准机器零点
校准机器零点
用 PCB 照相机 与在固定输送轨道上钻的孔对中 此位置有固定的 X 和 Y 座标
利用计算 我们设想实际有效的照相机 照相机偏移 当元件照相机的的中心正好 在所钻的孔上
方时
轴位置计数器给你显示出 MA_ 零点 _X_pg1 /MA_ 零点 _Y_pg1r 的数值
注意
pg 代表悬臂组 1
等于 80SXX 型悬臂配置
在此机械的固定位置上 我们校准 1 贴片生产组 区 最大是 2 个悬臂 上的所有悬臂
8
Fig. 8.8 - 20 校准机器零点
警告
对于 SIPLACE S2x 机器
始终两个悬臂校准机器零点 对于 SIPLACFx 机器 如果机器零点被校
准 则 IC 照相机也应该进行校准
Zero point correction
measured with the PCB camera
fixed distance
S 20 系列维修培训指南 I 2000 年 6 月版
8 校准
101
8.8.16
8.8.168.8.16
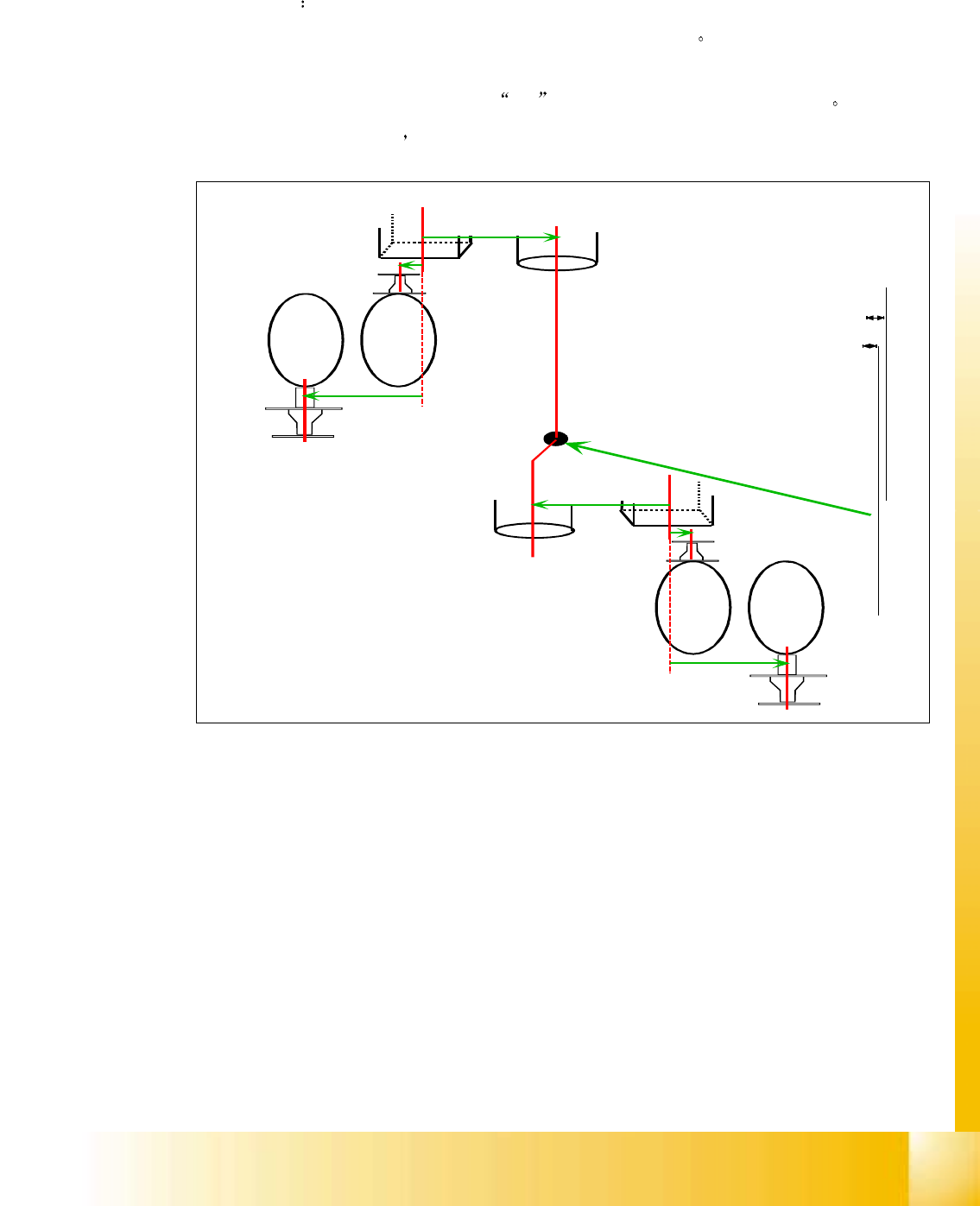
8.8.16 旋转头校准图
旋转头校准图旋转头校准图
旋转头校准图
额外考虑的是
用带有高度精密玻璃板的映射校准操作取得之 安置位置的特殊偏移
存储在 MAPP_11.MA...MAPP22.MA
以及在机器安装期间用精确的校准或用
MFU 测量取得之悬臂安置的统计平 均偏移
存储在 REAL.MA 数据集团 头 1.... 输送 1.....Hohenoffset_X, Hohenoffset_Y.
8
Fig. 8.8 - 21对旋转头校准的图
fix e d
m achine zero
point coordinates
M A _Nullpunkt_X_pg1
M A _Nullpunkt_Y_pg1
R V-cam era>PC B-
cam era offset
Kam era_offset_X
Kam era_offset_Y
Segm ent-
offset above (I)
Offset_X
Offset_Y
Segm ent-
offset below (II)
Offset_X
Offset_Y
R V-cam era>PC B-
cam era offset
Kam era_offset_X
Kam era_offset_Y
Segm ent-
offset above (I)
Offset_X
Offset_Y
Segm ent-
offset below (II)
Offset_X
Offset_Y
Zero point correction
value gantry 1 m easured
with PCB-cam era
Zero point correction
value gantry 2 m easured
with PCB-cam era
2000 年 6 月版 S 20 系列维修培训指南 I
8 校准
102
8.8.17
8.8.178.8.17
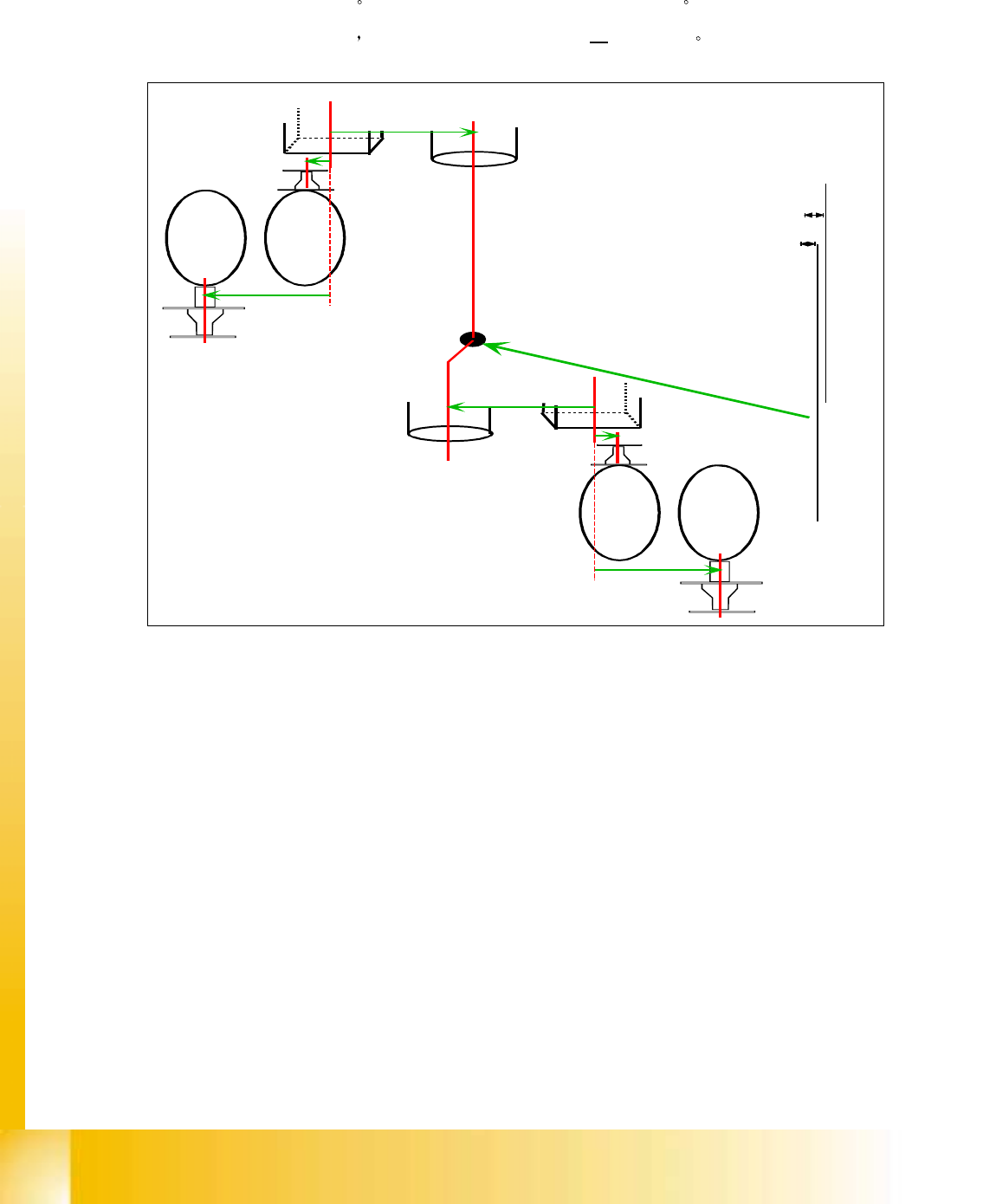
8.8.17 两个悬臂组合的校准图
两个悬臂组合的校准图两个悬臂组合的校准图
两个悬臂组合的校准图
悬臂 1 的贴片头定向在左边 所以 -comp,>PCB- 照相机 _ 偏移 是负的
悬臂 2 的贴片头定向在右边 所以 - comp.-,>PCB- 照相机 偏移是正的
8
Fig. 8.8 - 22 X 和 Y 轴的固定机器零点坐标对两个悬臂均有效
fix e d
m achine zero
point coordinates
M A_N ullpunkt_X_pg1
M A_N ullpunkt_Y_pg1
R V-cam era>PC B -
c a m e r a o ffs e t
Kam era_offset_X
Kam era_offset_Y
Segm ent-
offset above (I)
O ffset_X
O ffset_Y
Segm ent-
o ffs e t b e lo w (II)
O ffset_X
O ffset_Y
R V-cam era>PC B -
c a m e r a o ffs e t
Kam era_offset_X
Kam era_offset_Y
Segm ent-
offset above (I)
O ffset_X
O ffset_Y
Segm ent-
o ffs e t b e lo w (II)
O ffset_X
O ffset_Y
Z e ro p o in t c o rre c tio n
value gantry 1 m easured
w ith P C B -c a m e ra
Z e ro p o in t c o rre c tio n
value gantry 2 m easured
w ith P C B -c a m e ra