S 20 Series Maintenance I.pdf - 第456页
S 20 系列维修培训指南 I 2000 年 6 月版 8 校准 107 8.8.20. 1 8.8.20. 1 8.8.20. 1 8.8.20. 1校 准 共 性 激 光 图 原理 校准共 性 激 光 图 原理 校准共 性 激 光 图 原理 校准共 性 激 光 图 原理 8 Fig. 8.8 - 27 校准共面 性 激 光 图 原理 dx dy x 0 y 0 C alib ratio n to o l Ra w d a t a v…
2000 年 6 月版 S 20 系列维修培训指南 I
8 校准
106
8.8.20
8.8.208.8.20
8.8.20 选项
选项选项
选项 校准共面性模块
校准共面性模块校准共面性模块
校准共面性模块
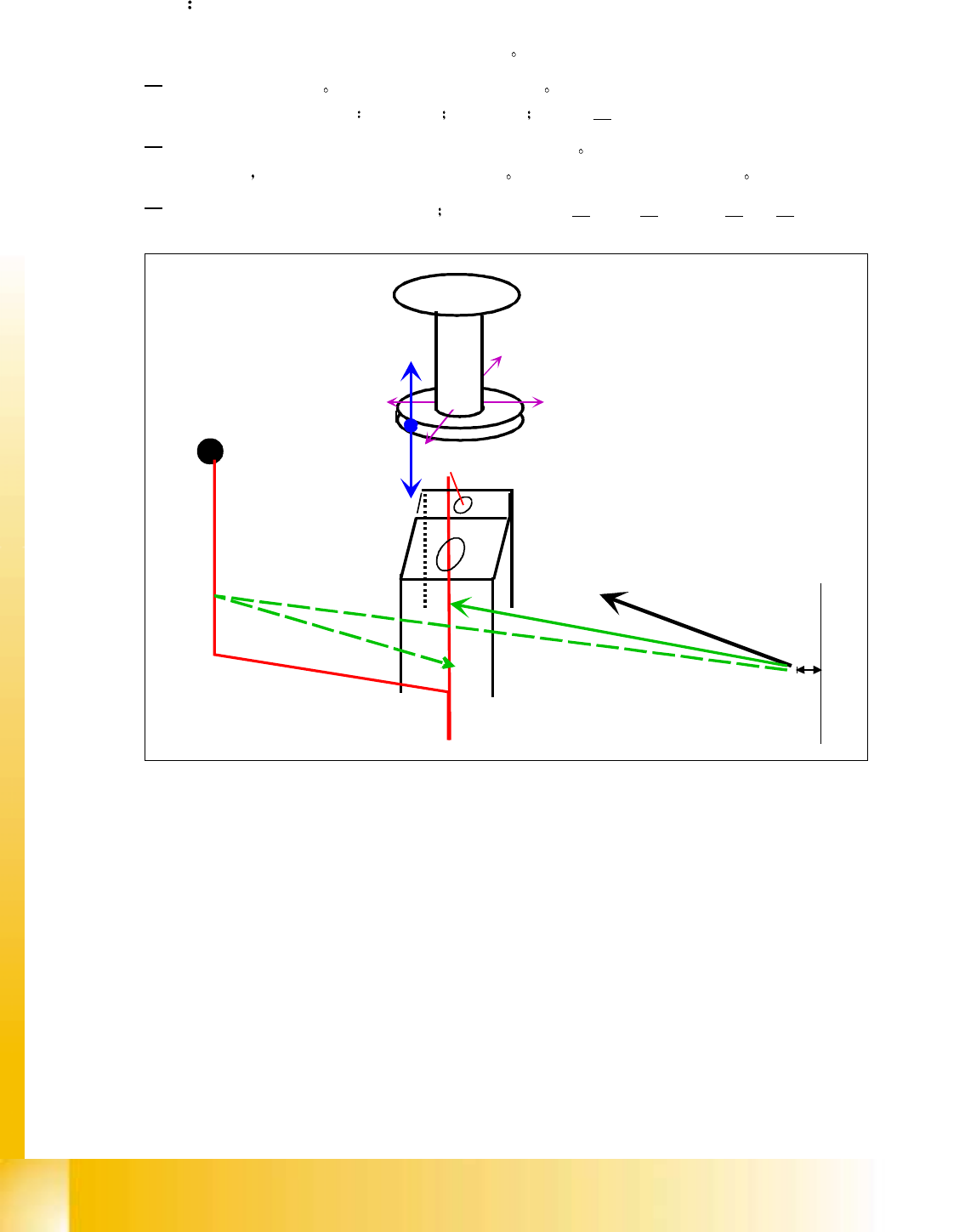
由于共面性模块的固定高度和 IC 头的活动 Z 高度
激光的焦点水平高度 这是后来元件底面的水平高
存储在 REAL.MA 数据集团 机器位置 共面性 2 共面性 偏移 Z
共面性激光光束中心相对于机器的 记数器零点进行校准 悬臂轴系统把共面性校准工具以 X 和
Y 方向移动
而激光则测量工具表面上的反射 反射距离的中心就是激光 位置
存储在 REAL.MA 数据集团 机器位置 共面性 2 照相机 偏移 X / 照相机 偏移 Y/
8
Fig. 8.8 - 26 校准共面性模块
S 20 系列维修培训指南 I 2000 年 6 月版
8 校准
107
8.8.20.1
8.8.20.18.8.20.1
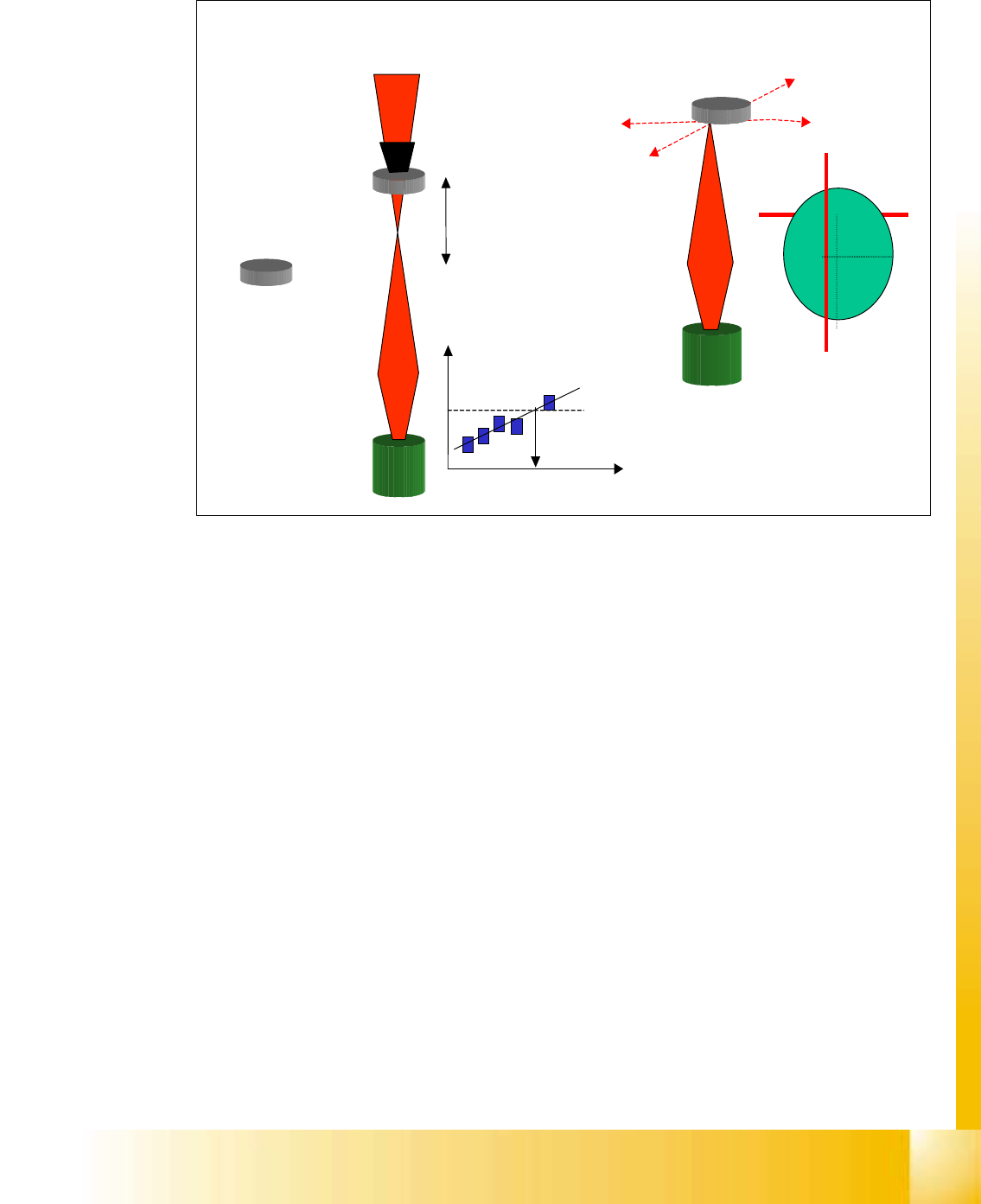
8.8.20.1校准共性激光图原理
校准共性激光图原理校准共 性激光图原理
校准共性激光图原理
8
Fig. 8.8 - 27 校准共面性激光图原理
dx
dy
x
0
y
0
Calibration tool
Raw data value
Axial position
Determining the
focus level
Axis Z
31129
2000 年 6 月版 S 20 系列维修培训指南 I
8 校准
108
8.8.21
8.8.218.8.21
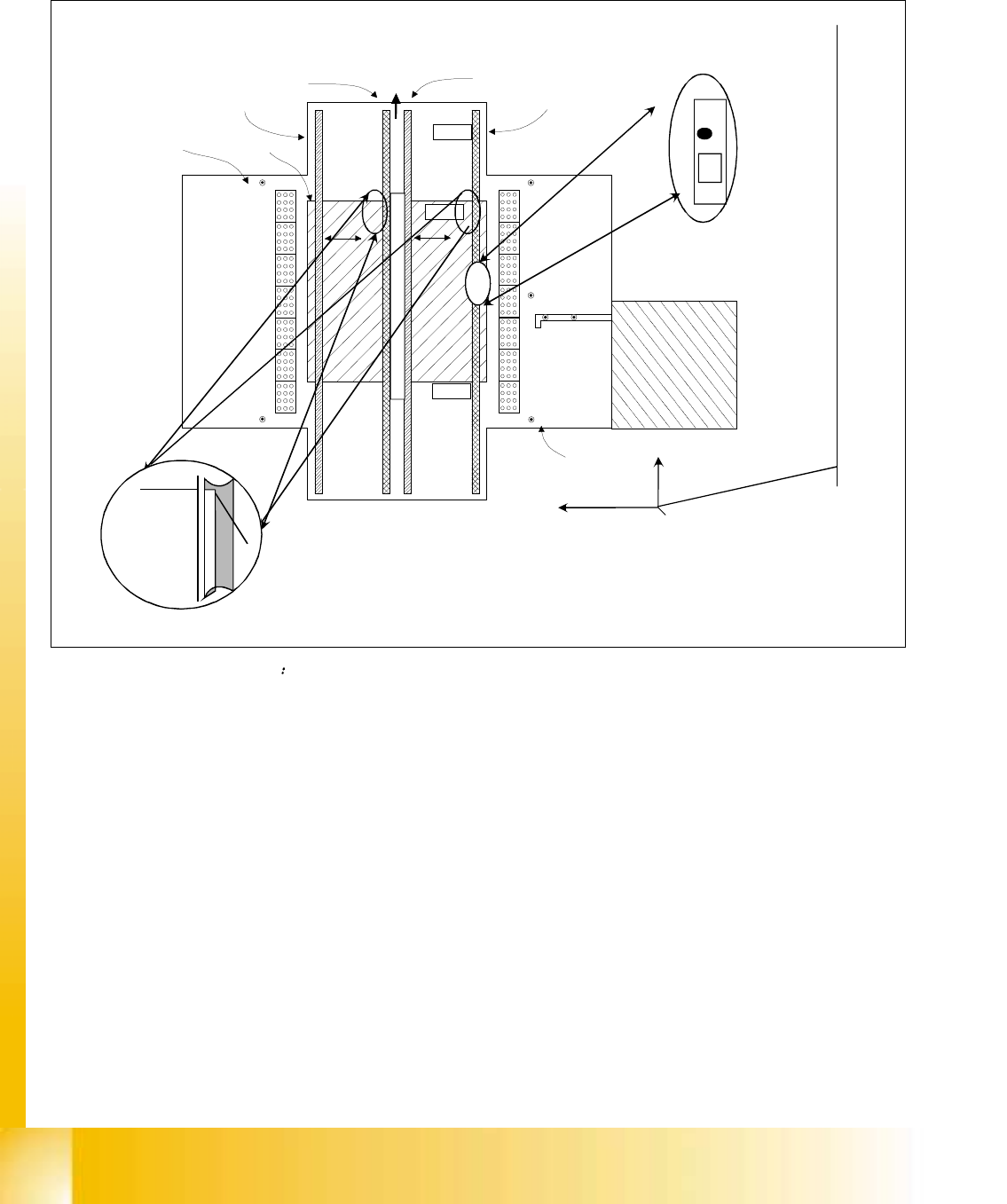
8.8.21 其他机器位置
其他机器位置其他机器位置
其他机器位置
8
Fig. 8.8 - 28 综述 机器位置
Counter zero
position
SP3 =
feeder
area
3
SP1
SP2
WPC
X - MA coordinate
system
Y - MA coordinate
system
counter zero position
position after
reference
run gantry 1
position after
reference
run gantry 2
fixed pcb corner
track 120 (marke2)
track 1 (marke1)
lifting table
2. movable transport
2. fixed transport
1.movable transport side
1. fixed transport
with double transport
with single transport
transport direction
nozzle changer 1
nozzle changer 2
track 1 (marke1)
track 120 (marke2)
track (marke1)
track 61 (marke1)