S 20 Series Maintenance I.pdf - 第437页
2000 年 6 月版 S 2 0 系列维修培训指南 I 8 校准 88 8.8.3 8.8.3 8.8.3 8.8.3 计算 矩阵 方程 计算 矩阵 方程 计算 矩阵 方程 计算 矩阵 方程 用 矩阵 方程 下列修 正 矩阵 数 值 可 计算 出来 这些校准 数据存储在 照 相机 1 数据 块 中的 REAL.MA 中 ( 以 及 在 S 机器在 照 相机 3 的 情况 下 ) 8 Fig. 8.8 - 7 修 正 矩阵 数 值 \ …
S 20 系列维修培训指南 I 2000 年 6 月版
8 校准
87
!
运动至第三个 矩阵校准位置 并取像素结果
8
Fig. 8.8 - 5 校准工具位置
8.8.2
8.8.28.8.2
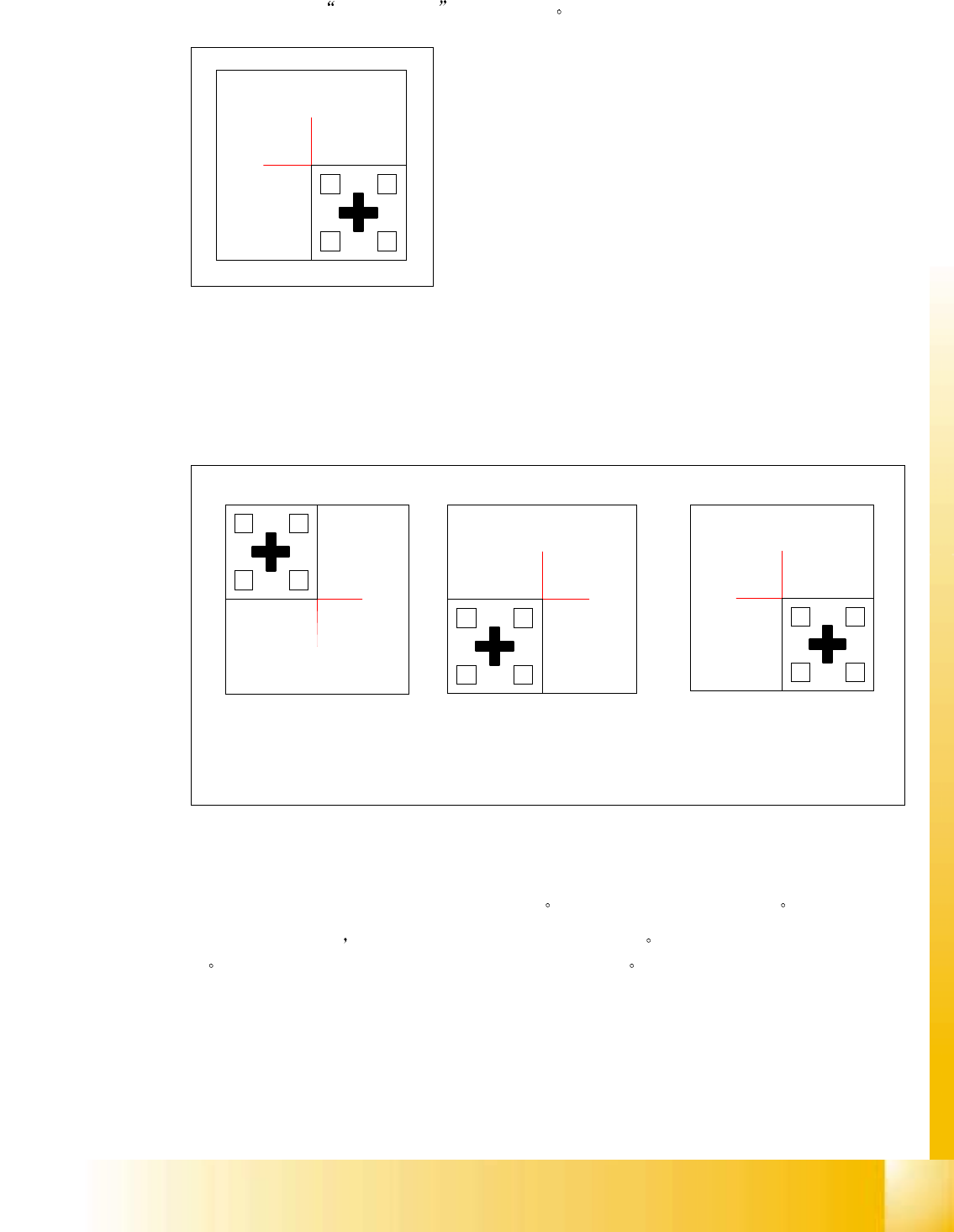
8.8.2 测量原则
测量原则测量原则
测量原则
8
Fig. 8.8 - 6 测量原则
悬臂轴把照相机移动到校准工具 上方的某个位置 获取像素结果并计算校准矩阵
在此位置的附加测量 按照机器坐标系统来获 取照相机的角度 在测量 1和测量 2 之间 只移动 X
轴
预期位置和测量位置之间的差是计算机安装角度的基础
1. measuring
2. measuring
3. measuring

2000 年 6 月版 S 20 系列维修培训指南 I
8 校准
88
8.8.3
8.8.38.8.3
8.8.3 计算矩阵方程
计算矩阵方程计算矩阵方程
计算矩阵方程
用矩阵方程 下列修正矩阵数值可计算出来 这些校准数据存储在照 相机 1 数据块中的 REAL.MA
中 ( 以及在 S 机器在照相机 3 的情况下 )
8
Fig. 8.8 - 7 修正矩阵数值
\ ** Korrekturfaktor_A_X ** \ -62,
\ ** Korrekturfaktor_B_X ** \ 4636,
\ ** Korrekturfaktor_C_X ** \ 0,
\ ** Korrekturfaktor_A_Y ** \ -56,
\ ** Korrekturfaktor_B_Y ** \ -4656,
\ ** Korrekturfaktor_C_Y ** \ 0,
\ ** Kamera_Offset_X ** \ -304,
\ ** Kamera_Offset_Y ** \ -125236,
\ ** Kamera_Offset_Z ** \ 0,
\ ** Kamera_Offset_Winkel ** \ 72,
\ XU_Pixel \ 11591,
\ YU_Pixel \ 11642,
Angle smaller than 100 (1/100
S 20 系列维修培训指南 I 2000 年 6 月版
8 校准
89
8.8.4
8.8.48.8.4
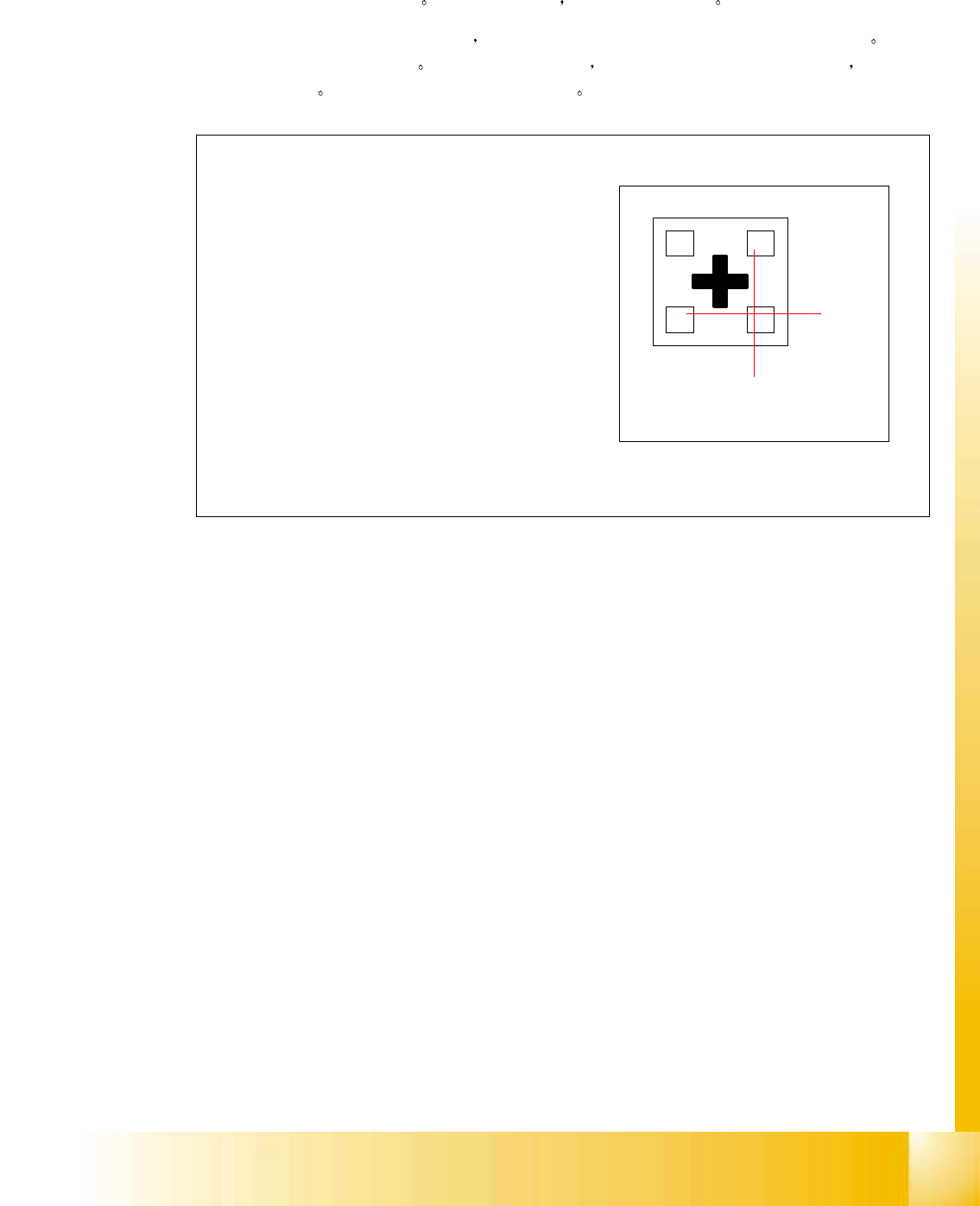
8.8.4 元件照相机 ( 旋转头 )
元件照相机 ( 旋转头 )元件照相机 ( 旋转头 )
元件照相机 ( 旋转头 )
元件照相机以同样的方式校准 校准工具被吸取 由元件照相机对 中
在对中十字基准 ( 在元件的中心 ) 后
元件基准 ( 它在已知的公制距离 ) 用像素矩阵测量 与在
PCB 照相机计算修正矩阵一样
为了测量照相机角度 校准工具移动了它本身长度之半 然后测
量两个元件基准
此位置与以前的测量值进行比较
8
Fig. 8.8 - 8
例子
SIPLACE 80 F5 HM
的 3
2x32 mm
元件照相机
\ ** Korrekturfaktor_A_X ** \ -30,
\ ** Korrekturfaktor_B_X ** \ -32128,
\ ** Korrekturfaktor_C_X ** \ 0,
\ ** Korrekturfaktor_A_Y ** \ 10,
\ ** Korrekturfaktor_B_Y ** \ -32150,
\ ** Korrekturfaktor_C_Y ** \ 0,
\ ** Kamera_Offset_X ** \ 0,
\ ** Kamera_Offset_Y ** \ 0,
\ ** Kamera_Offset_Z ** \ 0,
\ ** Kamera_Offset_Winkel ** \ 0,