S 20 Series Maintenance I.pdf - 第184页
2000 年 6 月版 S 2 0 系列维修培训指南 I 5 旋转头 12 5. 1 .8 5. 1 .8 5. 1 .8 5. 1 .8 PCB PCB PCB PCB 基准的 PCB 位置识别对中 基准的 PCB 位置识别对中 基准的 PCB 位置识别对中 基准的 PCB 位置识别对中 Fig. 5. 1 - 8 PCB 基准的 PC B 位置识别对中 至此 , 对中的 基准点可以确定板的 实际位置 照相机拍摄基准点的 照片 视觉系…
S 20 系列维修培训指南 I 2000 年 6 月版
5 旋转头
11
5.1.7
5.1.75.1.7
5.1.7 PCB
PCB PCB
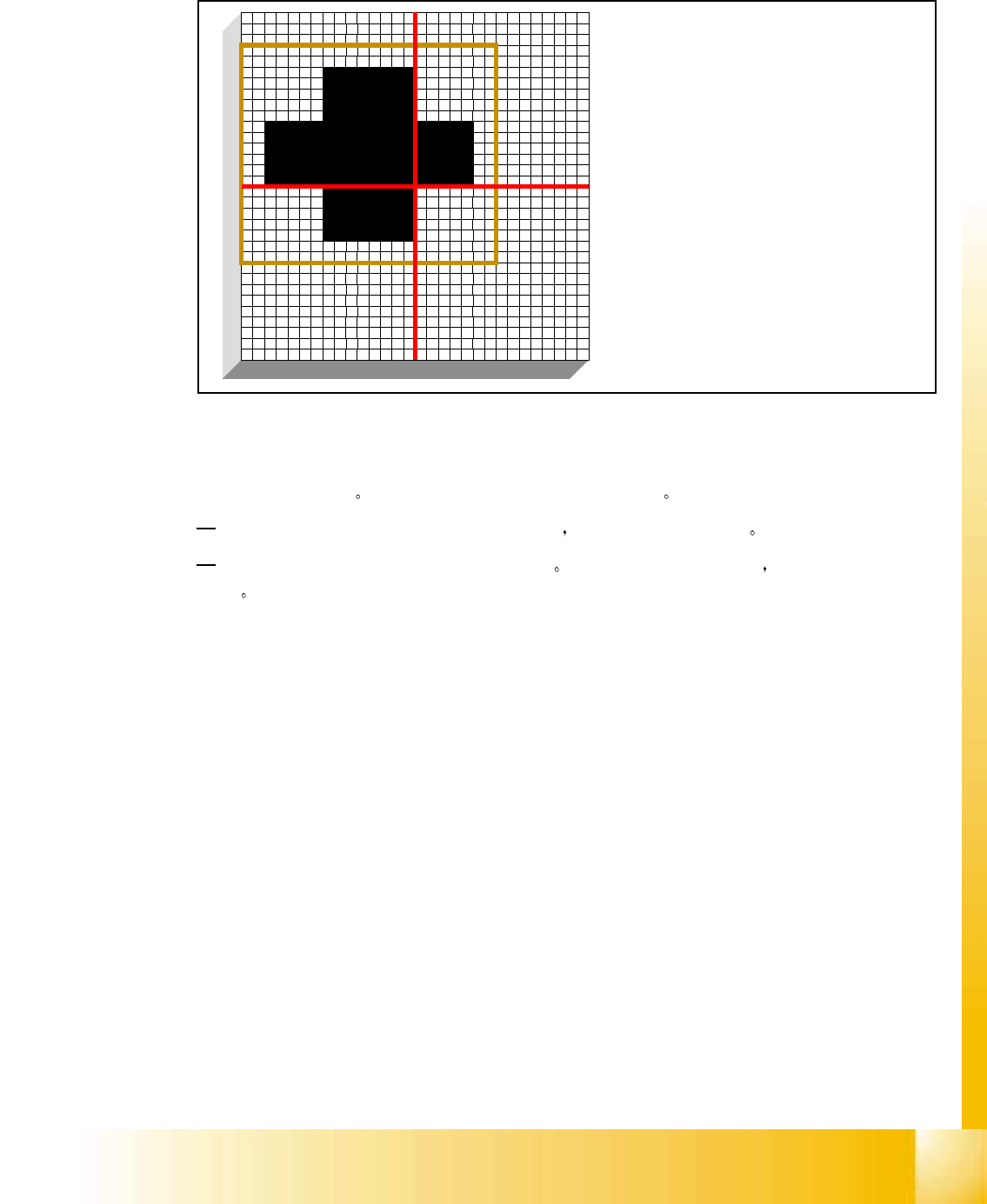
PCB 位置识别行至 PCB 标定位置
位置识别行至 PCB 标定位置位置识别行至 PCB 标定位置
位置识别行至 PCB 标定位置
Fig. 5.1 - 7 PCB 位置识别行至 PCB 标定位置
基准应处于标定位置 PCB 照相机从等待位置移至该基准位置
拾取第 7 个元件并将吸嘴 11 转到拾取角度后 PCB 位置识别即告完成
悬臂轴将 PCB 照相机移至理论上的基准位置 该照相机拍摄基准照片后 视觉系统计算 中心位
置
2000 年 6 月版 S 20 系列维修培训指南 I
5 旋转头
12
5.1.8
5.1.85.1.8
5.1.8 PCB
PCB PCB
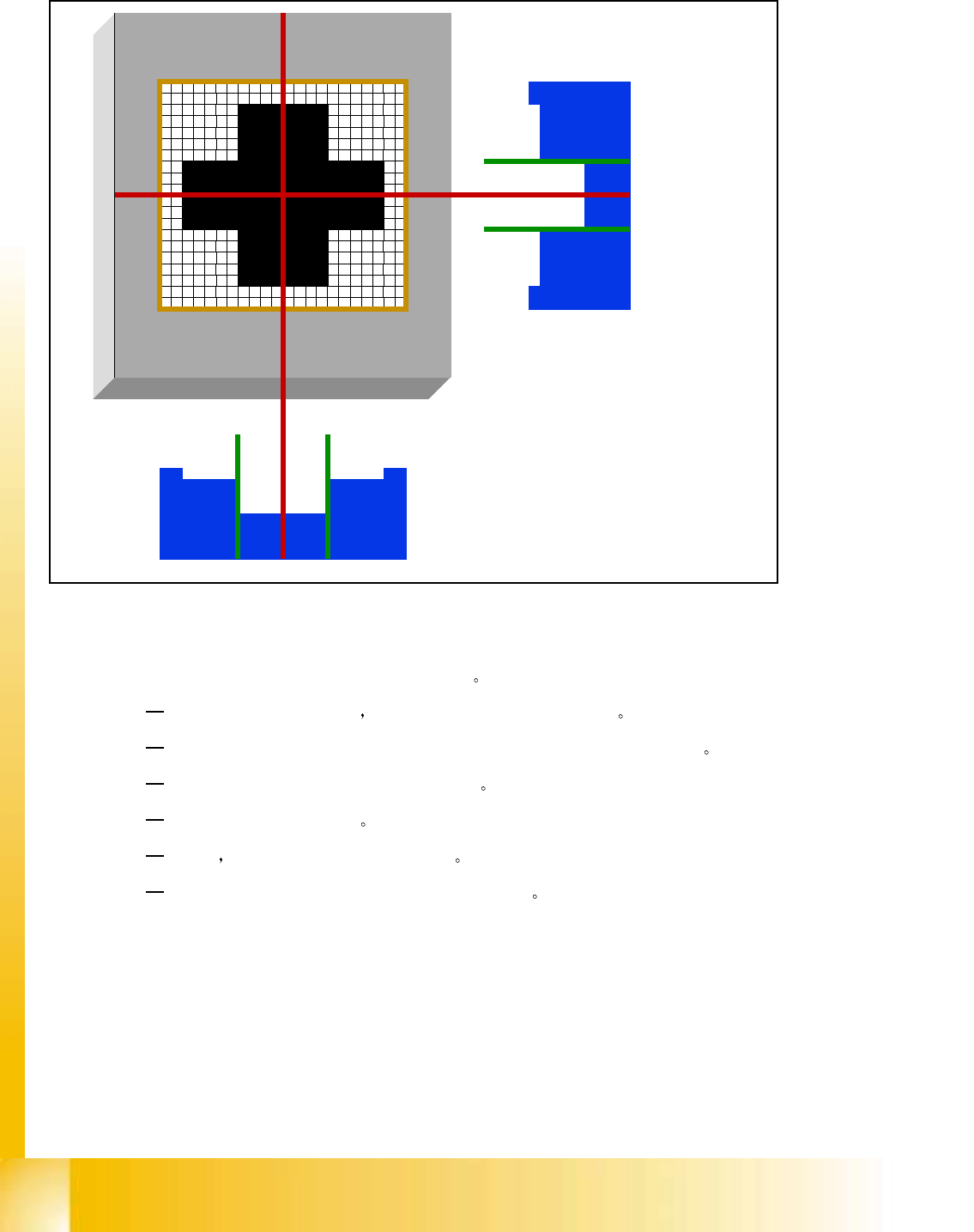
PCB 基准的 PCB 位置识别对中
基准的 PCB 位置识别对中基准的 PCB 位置识别对中
基准的 PCB 位置识别对中
Fig. 5.1 - 8 PCB 基准的 PCB 位置识别对中
至此 , 对中的基准点可以确定板的实际位置
照相机拍摄基准点的照片 视觉系统计算该照片 的中心位置
第二次计算出的值是标定基准点位 置和计算得出的基准 点位置间的差值
所有板的基准点的光学对中都采用 此办法
此数据发送到机器控制器
计算 X Y 和 PCB 的角度位置的校正值
现在 , 悬臂轴可以把贴片头移至下一个拾取位置
S 20 系列维修培训指南 I 2000 年 6 月版
5 旋转头
13
5.1.9
5.1.95.1.9
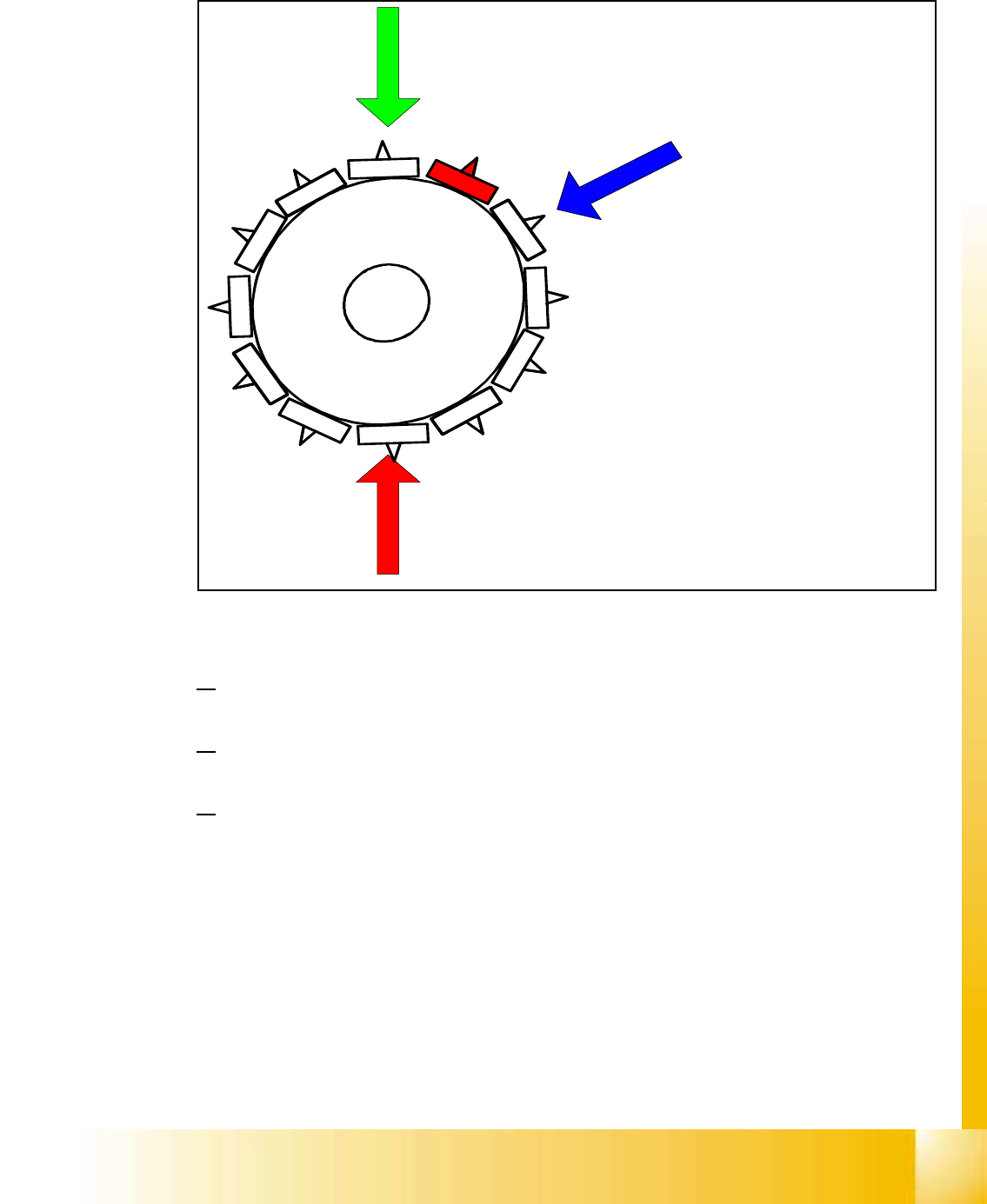
5.1.9 拾取第 8 个元件
拾取第 8 个元件拾取第 8 个元件
拾取第 8 个元件
Fig. 5.1 - 9 拾取第 8 个元件
视觉系统 :
对中该悬臂段位器 2 上的元件
DP- 站 :
把吸嘴 12 转到拾取角度
拾取 / 贴片位 :
拾取第 8 个元件
2
3
4
5
6
7
8
9
10
11
12
1
Star 位置
位置位置
位置
Digit: 84.000
角度
角度角度
角度 : 210 °