S 20 Series Maintenance I.pdf - 第196页
2000 年 6 月版 S 2 0 系列维修培训指南 I 5 旋转头 24 5. 1 .2 1 5. 1 .2 1 5. 1 .2 1 5. 1 .2 1 DP 站上的转动过程 -2 DP 站上的转动过程 -2 DP 站上的转动过程 -2 DP 站上的转动过程 -2 .b .b .b .b 定位至贴片角度 定位至贴片角度 定位至贴片角度 定位至贴片角度 Fig. 5. 1 - 1 8D P 站上的转动程 序 -2. b 定位至贴片角度 …
S 20 系列维修培训指南 I 2000 年 6 月版
5 旋转头
23
5.1.20
5.1.205.1.20
5.1.20 DP 站上的转动过程 -2
DP 站上的转动过程 -2DP 站上的转动过程 -2
DP 站上的转动过程 -2.a
.a.a
.a 定位至拾取角度
定位至拾取角度定位至拾取角度
定位至拾取角度
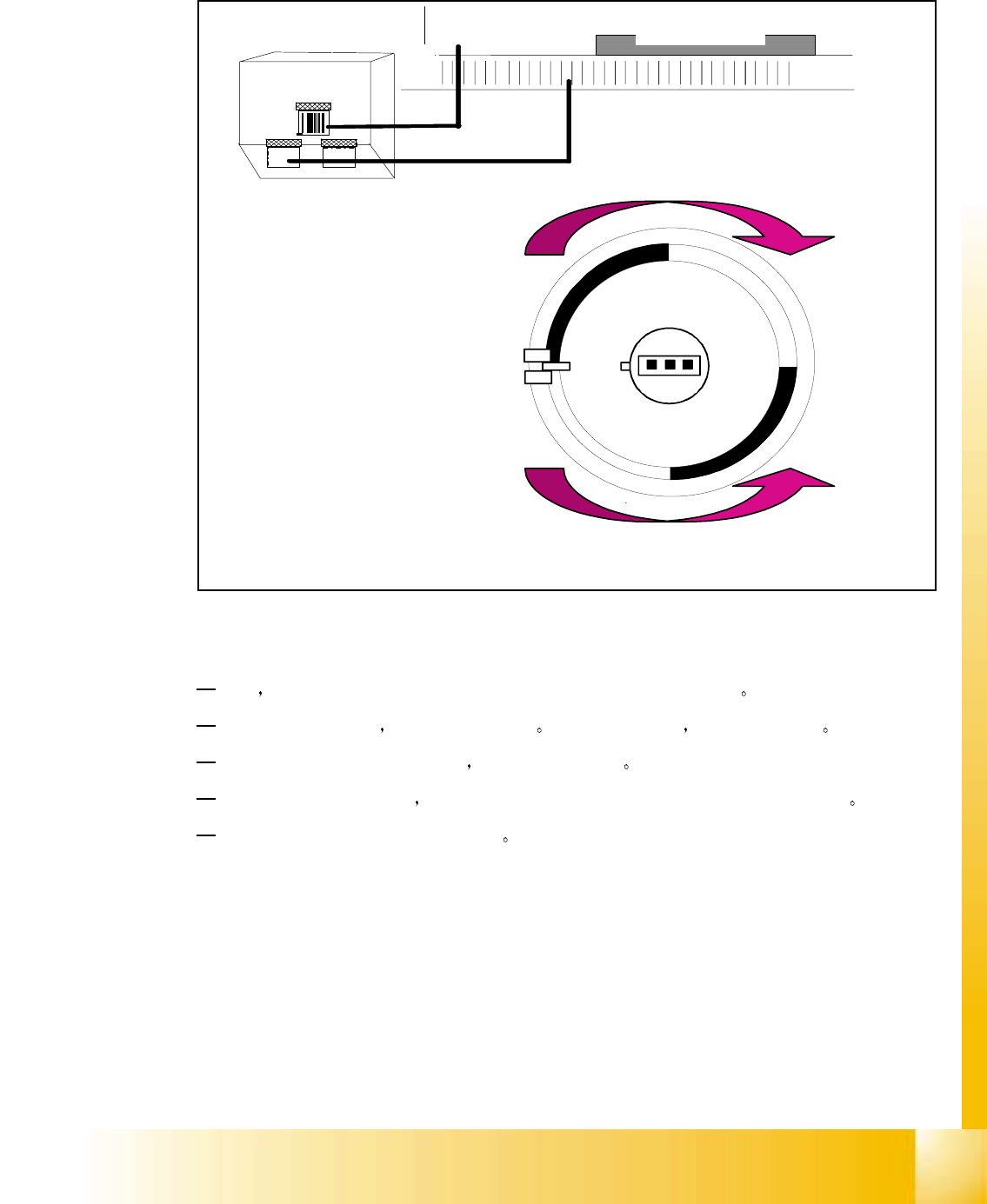
Fig. 5.1 - 17DP站上的转动过程 -2.a 定位至拾取角度
首先 轴电机将段位器移至 0 脉冲并检查信号级别是否为 3 个 Digit
随着第二次定位运转 轴运动至拾取角 度 拾取角度为 0° 时 进行第 2 次起动
当位置偏差在允许的范围之内时 终止信号就 被设定
如果拾取角度是设定好的 轴就以绝对定位模式运动到一个 零脉冲并检查该零脉 冲
在 0° 和 180° 拾取角度之间没有差别
Zero pulse
window
Track signals
¼ turning
bright dark
transition is
zero pulse
Turning directions
2000 年 6 月版 S 20 系列维修培训指南 I
5 旋转头
24
5.1.21
5.1.215.1.21
5.1.21 DP 站上的转动过程 -2
DP 站上的转动过程 -2DP 站上的转动过程 -2
DP 站上的转动过程 -2.b
.b .b
.b 定位至贴片角度
定位至贴片角度定位至贴片角度
定位至贴片角度
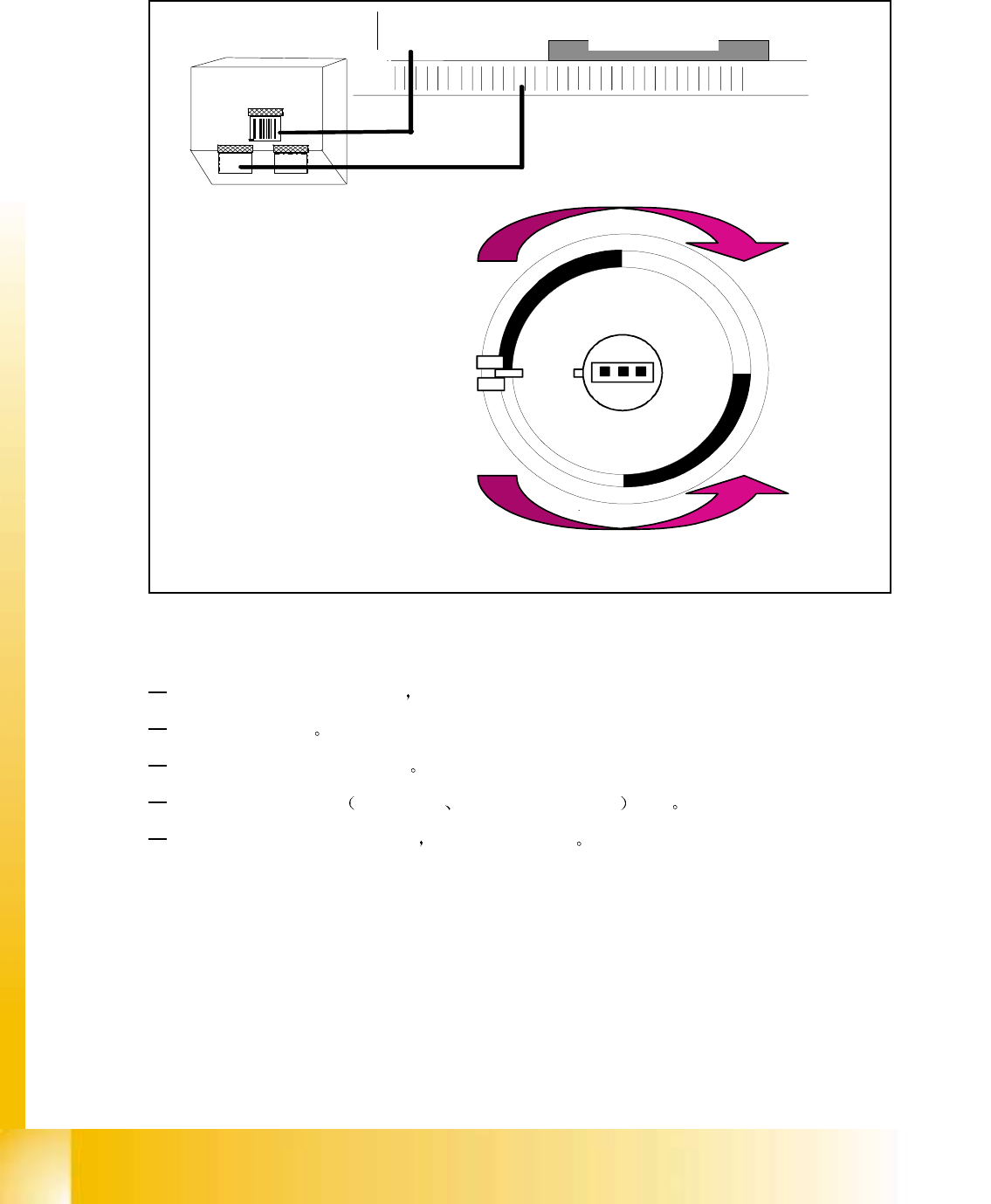
Fig. 5.1 - 18DP站上的转动程序 -2.b 定位至贴片角度
将 dp 轴的位置计数器设定到 0 则实际
位置即可设定到零
DP 电机使用相对位置模式操作
DP 轴开始向目标位置 取己校准的 设定好和对中的数值 移动
当位置偏差在允许的范围之内时 终止信号就被 设定
Zero pulse
window
Track signals
¼ turning
bright dark
transition is
zero pulse
Turning directions
S 20 系列维修培训指南 I 2000 年 6 月版
5 旋转头
25
5.1.22
5.1.225.1.22
5.1.22 DP 站上的转动过程 -3
DP 站上的转动过程 -3DP 站上的转动过程 -3
DP 站上的转动过程 -3.
..
. 旋转停止
旋转停止旋转停止
旋转停止
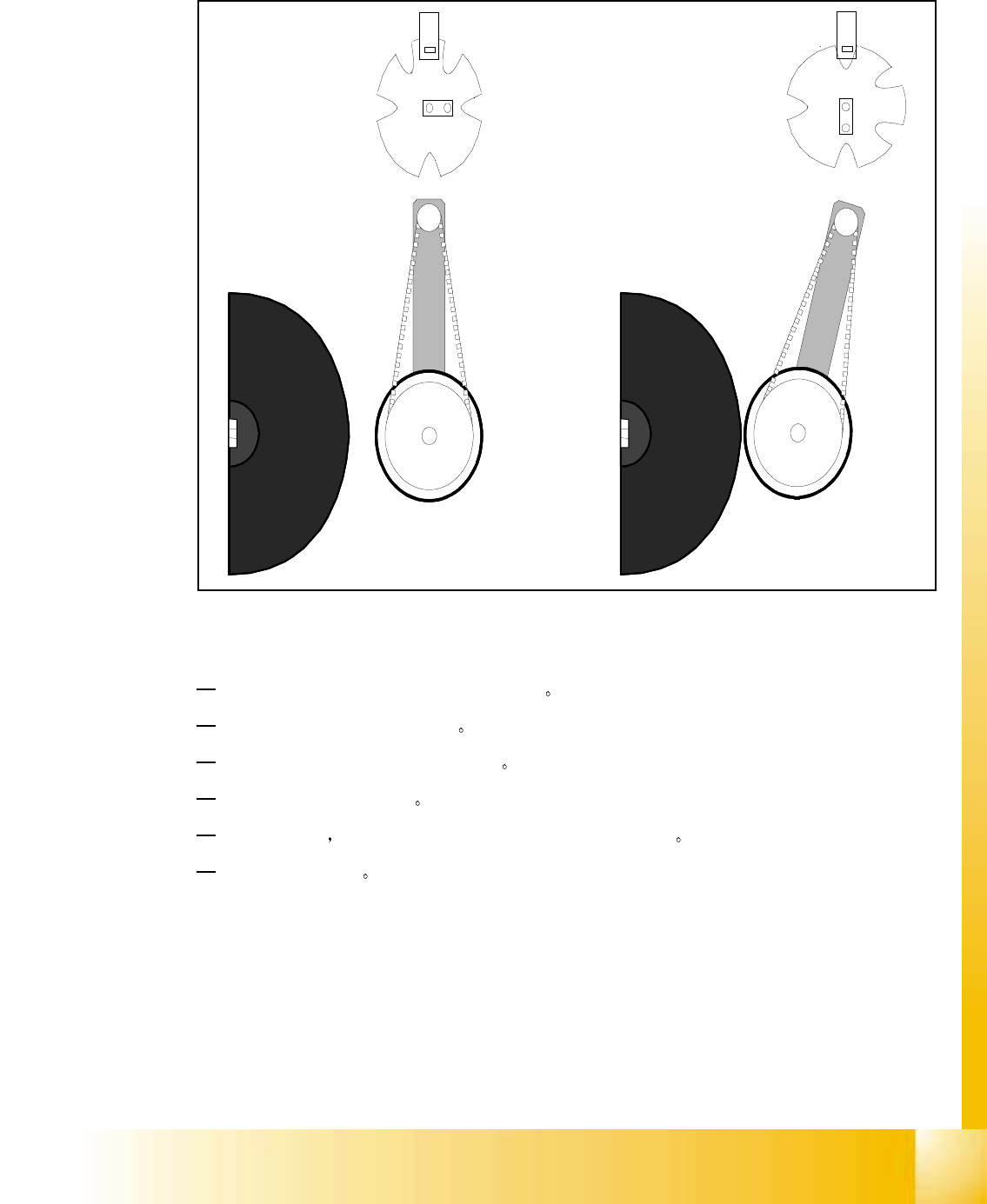
Fig. 5.1 - 19DP站上的转动过程 -3. 旋转停止
提出停止旋转的要求是 DP 定位的终止信号
光栅读数盘轴从 DP 电机上打开
步进电机由凸轮上的光电传感器控制
图1显示旋转停止的状态
从转入状态起 步进电机逆时针方向转动 90° 直至旋转停止
图 2 显示转入状态
1.
2.