99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第104页
应 该 注 意 的 是 , 当 通 过 选 择 一 个 特 征 配 置 了 限 值 时 , 方 向 信 息 只 是 复 制 到 限 值 ; 而 不 是 将 限 值 链 接 到 该 特 征 。 这 就 是 说 如 果 用 于 配 置 安 全 板 的 属 性 的 的 位 置 或 方 向 发 生 变 化 , 该 安 全 板 并 不 会 自 动 更 新 。 如 果 特 征 发 生 变 化 , 特 征 选 择 器 上 方 就 会 显 示 图 标 …
当通过
触发缩减模式
平面引起从
缩减
模式到
正常
模式的过渡时,将发生从
缩减
模式限值集到
正常
模式限值集的过渡。一旦机器人 TCP 穿过
触发缩减模式
平面,将为每个限值应用更宽松
的
正常
和
缩减
模式限值。一旦机器人 TCP 位于距
触发缩减模式
平面 20 mm 或更远的位置( 在
正常
模式一侧) ,
缩减
模式限值集将不再有效,并将强制应用
正常
模式限制集。
如果预测的轨迹将是使机器人 TCP 穿过
触发缩减模式
平面,则在即将超过新限值集中的关节
速度、工具速度或动量限值时,机器人手臂将在穿过此平面前就开始缩减。请注意,由于这些
限值在
缩减
模式限值集中要求更严格,因此只有在从
正常
模式过渡到
缩减
模式时才会出现这
种提前缩减的情况。
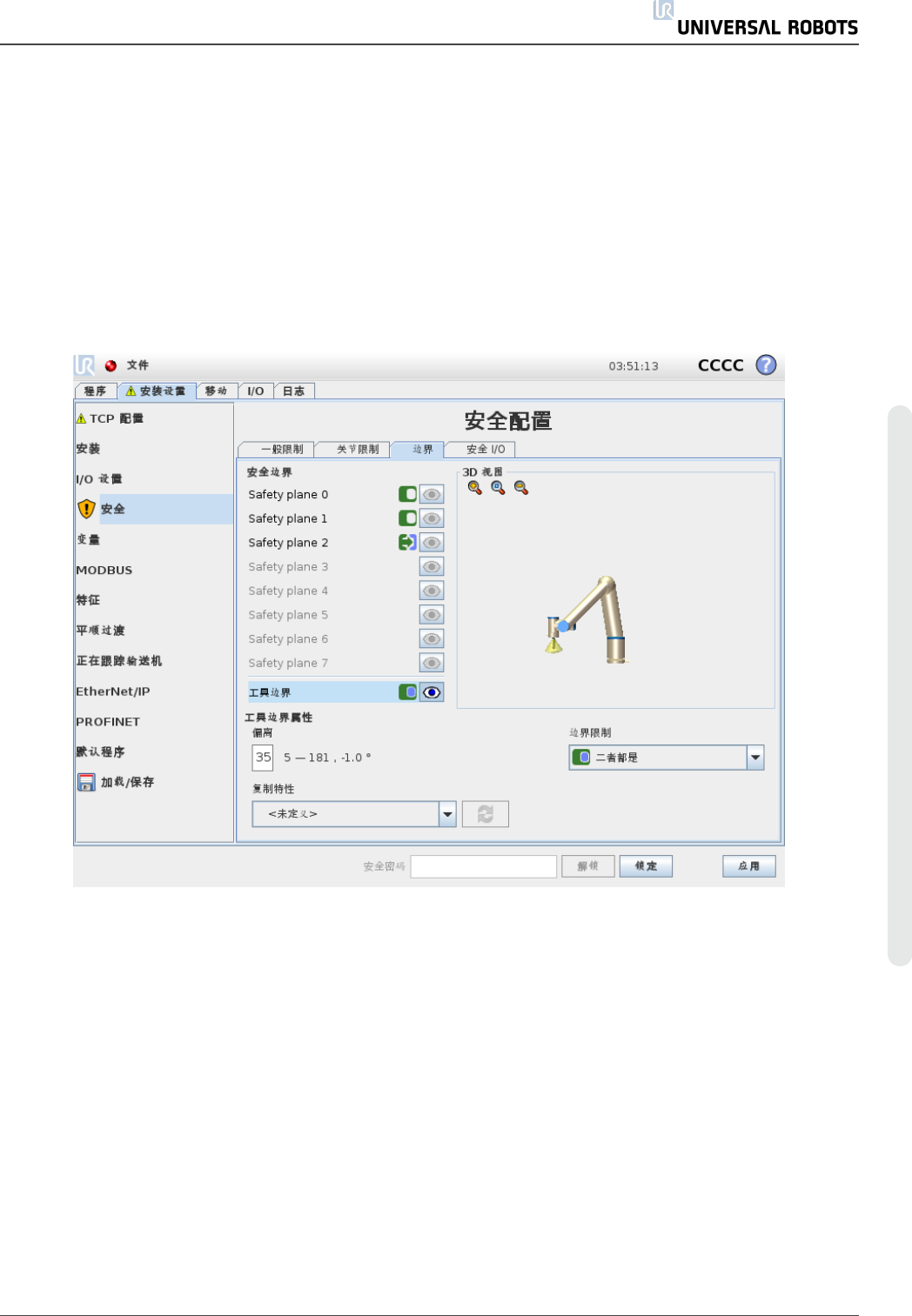
工 具 边 界 属 性
位于选项卡底部的Tool Boundary Properties面板用于定义机器人工具方向的限值,该
限值由所需的工具方向和该方向的最大允许偏离值组成。
偏离
Deviation文本字段显示机器人工具方向与所需方向的最大允许偏离值。更改偏差值的方法
是点击文本域,然后输入一个新的值。
可接受的数值范围以及偏离量的公差和单位在文本域旁边列出。
复制特性
机器人工具的所需方向使用当前机器人安装设置中的特征( 参见1.24.12. 安装设置 → 特征 在
本页129) 进行指定。被选属性的 z-轴会作为该极限的理想的工具方向矢量。
可使用“工具边界属性”面板左下方的下拉框选择特征。只有点和平面类型特征可用。选择<未
定义>项将清除平面的配置。
用 户 手 册 93 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
应该注意的是,当通过选择一个特征配置了限值时,方向信息只是
复制
到限值;而
不是
将限值
链接到该特征。这就是说如果用于配置安全板的属性的的位置或方向发生变化,该安全板并
不会自动更新。如果特征发生变化,特征选择器上方就会显示 图标。如果所选特征已从安
装设置中删除,也会显示该图标。 按钮可使用特征的当前方向更新限值。 图标位于特征
选择器上方。点击
安全模式
Tool Boundary Properties面板右侧的下拉菜单用于选择工具方向边界的
安全模式
。可
选项如下:
Disabled
工具边界限制从不激活。
Normal
安全系统处于
正常
模式下时,工具边界限值激活。
Reduced
安全系统处于
缩减
模式时,工具边界限值激活。
Normal & Reduced
安全系统处于
正常
或
缩减
模式时,工具边界限值激活。
所选
安全模式
由“安全边界”面板相应条目中的图标指示。如果安全模式设置为“已禁用”,将不
显示图标。
效果
当工具方向的偏离即将超过输入的最大偏离减去公差( 请参阅1.21.4. 公差 在本页83) 的值时,
如果工具继续沿预测的轨迹运动,程序执行将中止。请注意,公差值所示的负号只是用于表明
要从实际输入的值中减去公差。如果工具方向的偏差超过限制( 无公差) ,安全系统将实施 0
类停机。
UR5 94 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
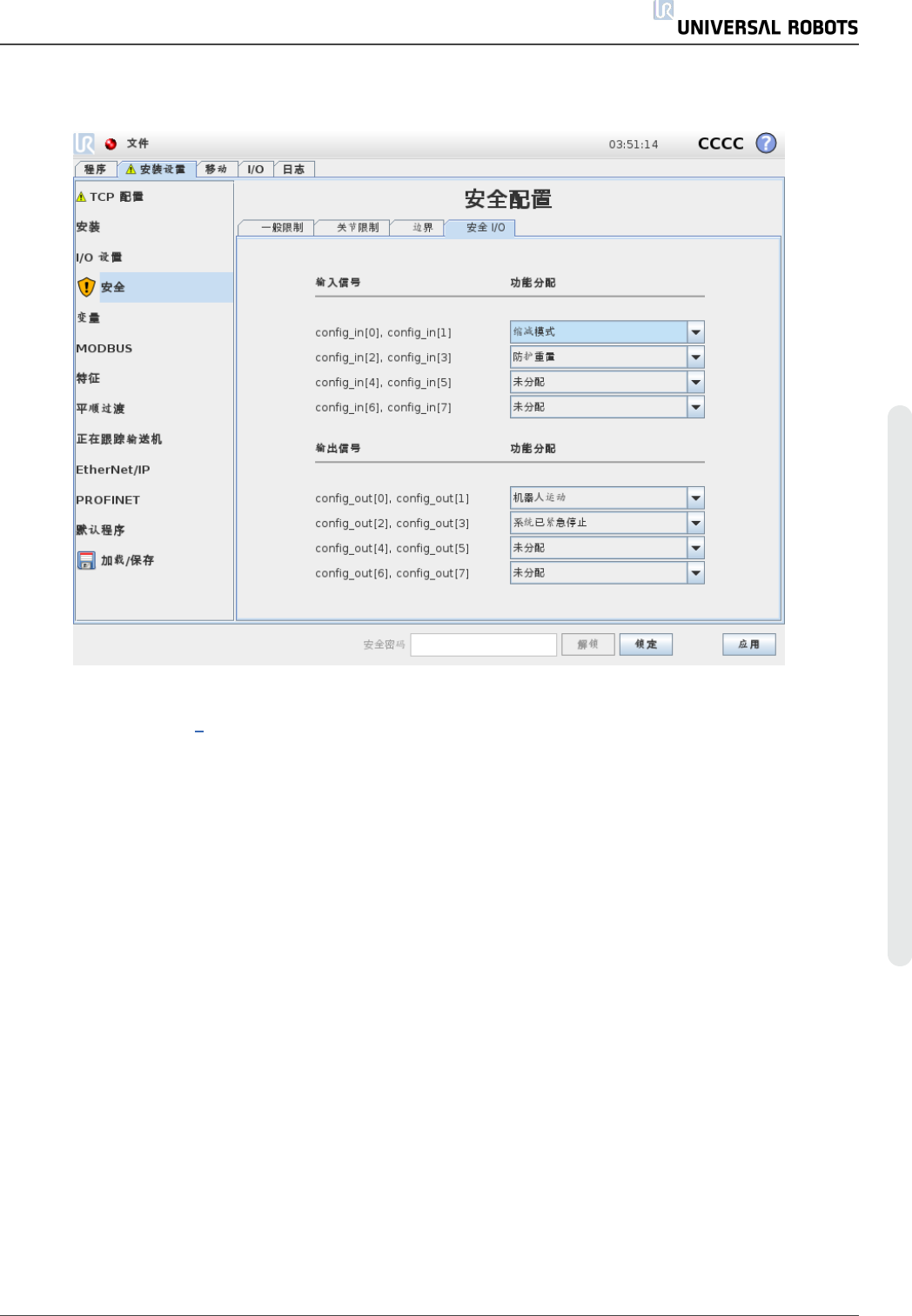
1.21.13. 安全 I/O
此屏幕用于定义可配置输入和输出 (I/O) 的
安全功能
。I/O 被分为输入和输出,并成对出现以便
为每个功能提供 3 类
1
PLd I/O。
每项
安全功能
只能控制一对 I/O。尝试再次选择相同的安全功能会将其从之前定义的第一对
I/O 中移除。输入信号有 5 种
安全功能
,输出信号也有 5 种。
注意:将安全功能应用于一组引脚将覆盖在“I/O 设置”( 请参阅1.24.8. 安装设置 → I/O 设置 在本
页121) 中为引脚指定的任何 I/O 动作。
输 入 信 号
对于输入信号,可以选择以下
安全功能
:系统紧急停止, 缩减模式, 防护重置, 3 档位使动装置
and 操作模式。
系统紧急停止
配置后,除了示教盒上的紧急停止按钮外,又多了一个紧急停止按钮。此功能需要使用符合
ISO 13850 的设备。
缩减模式
所有安全限值都有两种可以应用的模式:
正常
模式( 指定默认安全配置) 和
缩减
模式( 请参阅
1.21.6. 安全模式 在本页84了解更多详细信息) 。选择此项输入安全功能时,向输入端提供的低
电平信号将导致安全系统过渡到
缩减
模式。如有必要,机器人手臂将缩减,以满足
缩减
模式限
用 户 手 册 95 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。