99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第188页
1.2 5.24. 命 令 : 模 式 模 式 命 令 可 用 于 在 机 器 人 程 序 中 指 示 机 器 人 循 环 通 过 各 个 位 置 。 每 次 执 行 时 , 模 式 命 令 都 会 与 一 个 位 置 相 对 应 。 模 式 可 分 为 四 种 类 型 。 前 三 种 分 别 是 直 线 模 式 、 方 块 模 式 和 盒 子 模 式 , 这 三 种 可 用 于 表 示 常 规 模 式 中 的 位 置 。 正 规 模 …
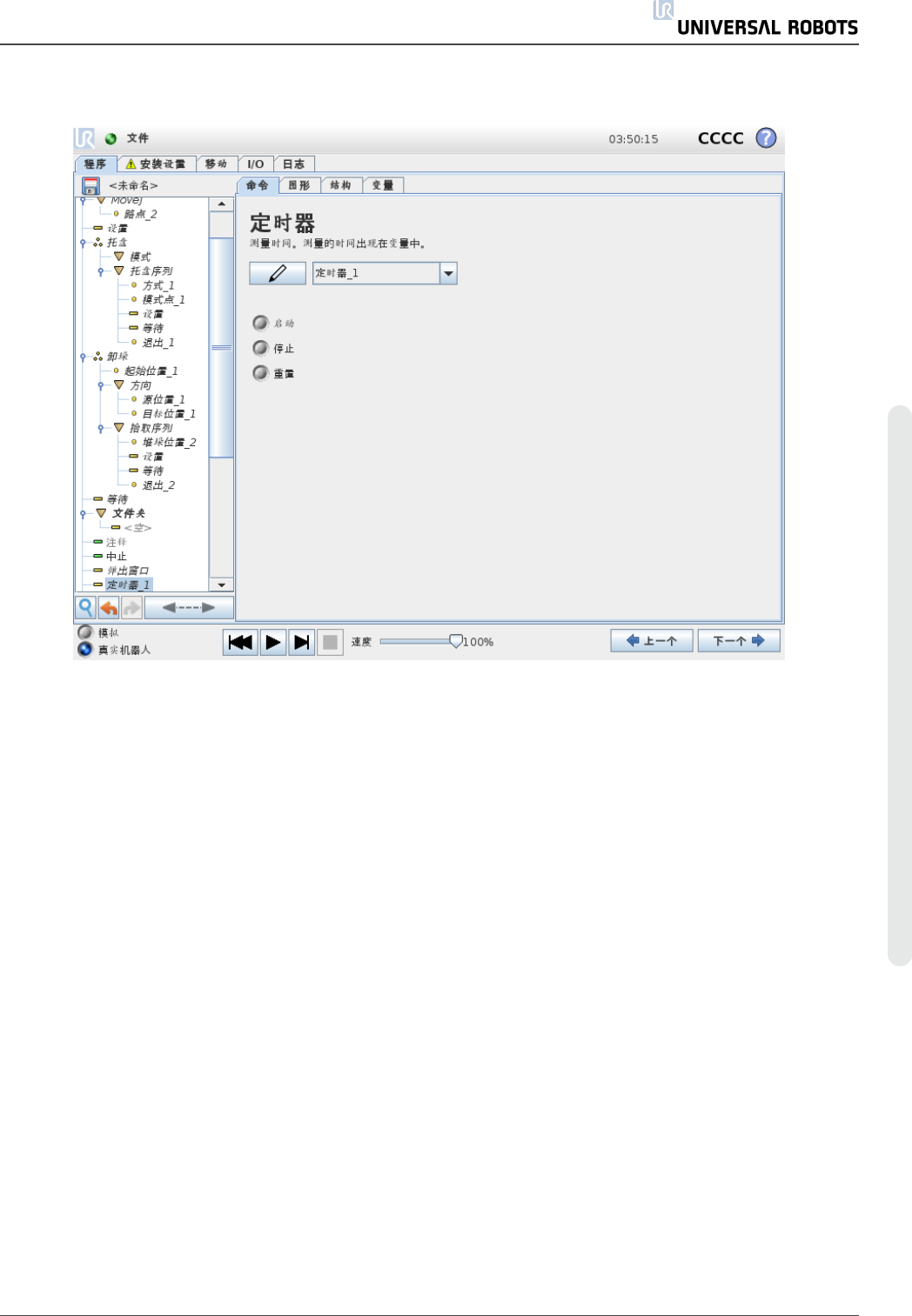
定 时 器
定时器测量程序特定部件运行所需的时间长度。程序变量包含自计时器启动以来经过的时
间,可在“变量”选项卡和“运行”选项卡中看到。
用 户 手 册 177 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
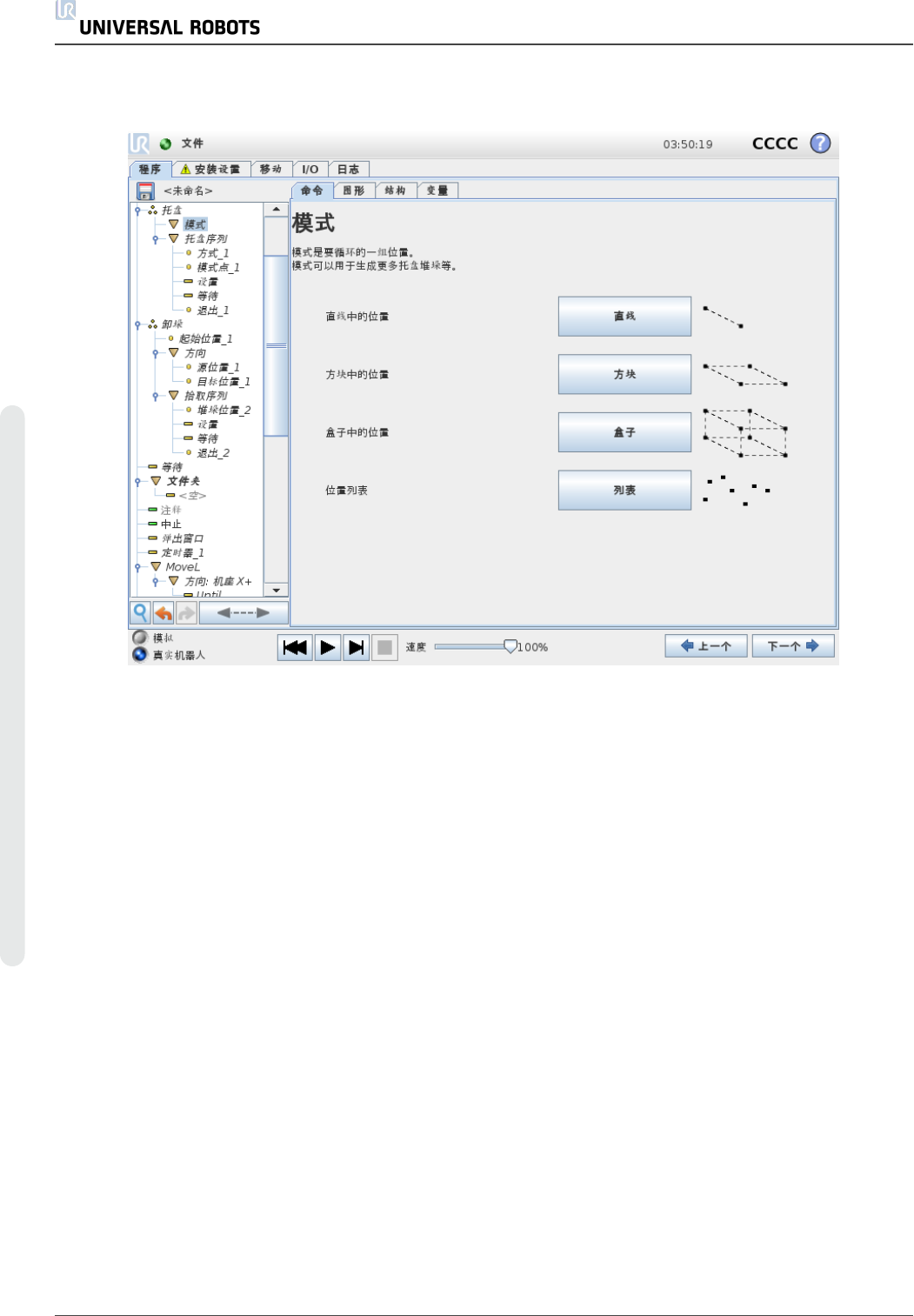
1.25.24. 命令:模式
模式命令可用于在机器人程序中指示机器人循环通过各个位置。每次执行时,模式命令都会
与一个位置相对应。
模式可分为四种类型。前三种分别是直线模式、方块模式和盒子模式,这三种可用于表示常规
模式中的位置。正规模式通过定义模式各边的多个特征点来定义。直线由两个端点确定,方块
由四个角点中的三个确定,盒子模式由八个角点中的四个确定。编程员输入沿模式每条边的
位置数量。然后,机器人控制器通过按比例添加矢量来计算各个模式位置。
如果要经过的位置不属于常规模式,可以选择列表选项,编程员可在其中提供所有位置的列
表。通过此方式,可以实现各种位置排列。
定 义 模 式
选择盒子模式时,屏幕将变成如下所示。
UR5 178 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
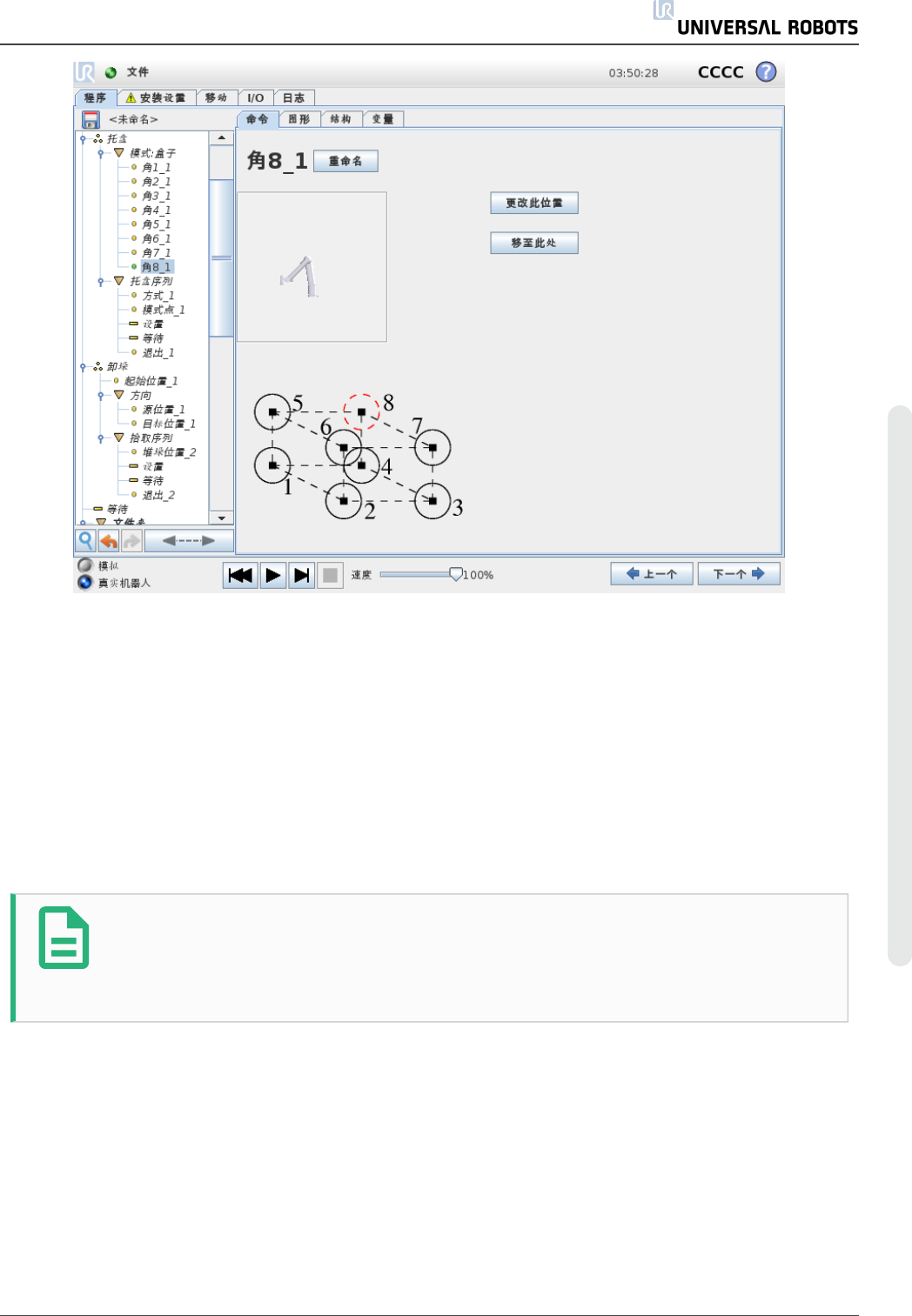
盒子模式使用三个矢量定义盒子的边。这三个矢量由四个点确定,第一个矢量从点一至点二,
第二个矢量从点二至点三,第三个矢量从点三至点四。每个矢量按输入的间隔计数进行划分。
模式中的具体位置只需按比例添加间隔矢量即可计算得出。
直线模式和方块模式的工作原理与此类似。
机器人经过各个模式位置,程序会使用一个计数变量。可以在模式命令屏幕上看到变量的名
称。变量从数字 0 到
X
*
Y
*
Z
− 1( 模式中的点数) 循环。此变量可通过赋值命令进行操作,并可
在表达式中使用。
1.25.25. 命令:力
提示
此功能如与“输送机跟踪”一起使用,可能会导致程序冲突。
• 请勿将此功能与“输送机跟踪”一起使用。
力模式适用于沿预定轴的实际 TCP 位置不重要,但沿着该轴所需的力必须达到的应用。例
如,如果机器人 TCP 在曲面上滚动、推动或拉动工件。
力模式还支持绕预定轴施加特定扭矩。如果在设置了非零力的轴上没有遇到障碍物,则机器
人手臂会尝试沿该轴加速。即使某个轴已被选为柔性轴,但机器人程序仍试图沿着该轴移动
机器人。但是,力控制会确保机器人手臂仍然施加接近规定的力值。
用 户 手 册 179 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。