99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第216页
Euroma p 67 程 序 模 板 已 准 备 就 绪 , 可 以 与 IMM 进 行 简 单 的 交 互 。 只 要 指 定 几 个 路 点 和 一 对 I/O 操 作 , 机 器 人 即 可 处 理 IMM 塑 模 成 型 的 工 件 。 路 点 包 括 : • WP _h om e_p os i ti on : 机 器 人 执 行 操 作 程 序 时 的 起 点 位 置 。 • WP _wai t_fo r_i tem : 机…
警告
确保 E12-E67 变换器符合 EUROMAP 67 和 EUROMAP 12 标准,并且安全功能
按正确的性能级别构建。如果不遵守该警告,有可能会造成严重的人员伤亡,
因为安全功能有可能失效。
1.29. GUI
下面章节将介绍如何从 GUI 控制 euromap 接口,如何验证从 IMM 发出或发送至 IMM 的信号,
如何使用结构化程序语句完成一些简单的编程工作,以及如何直接使用信号实现更高级的操
作。
不过,我们强烈推荐使用 Euromap 67 程序模板,这样就无需从头开始编写程序,具体详见下
一小节内容。
1.29.1. EUROMAP 67 程序模板
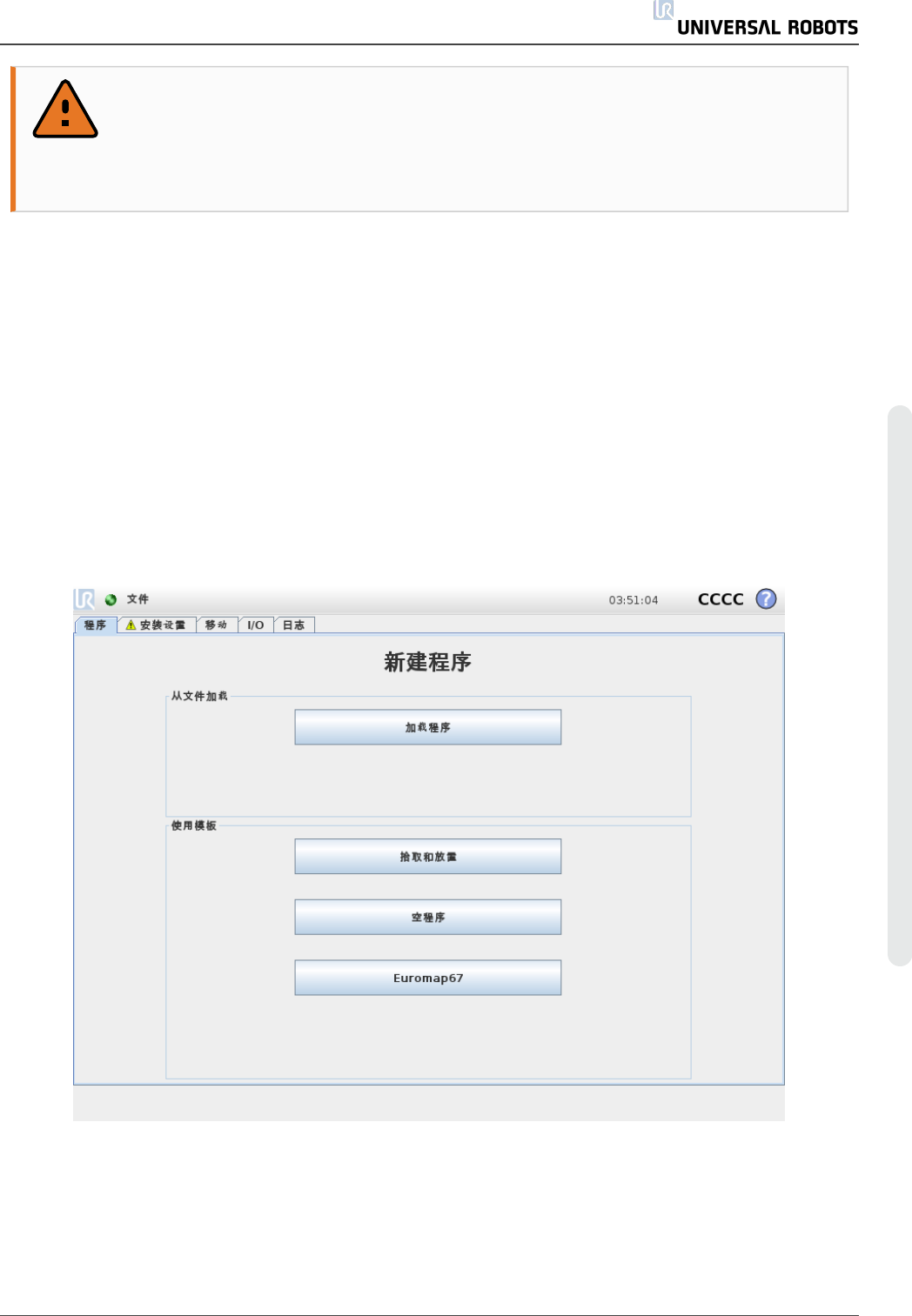
安装 Euromap 67 接口后,屏幕上会多出一个按钮,使用此按钮可以访问 Euromap 67 程序模
板。
选择 Euromap 67 程序模板后,将在程序屏幕上显示加载的模板。随后,屏幕左侧将显示模板
结构。
用 户 手 册 205 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
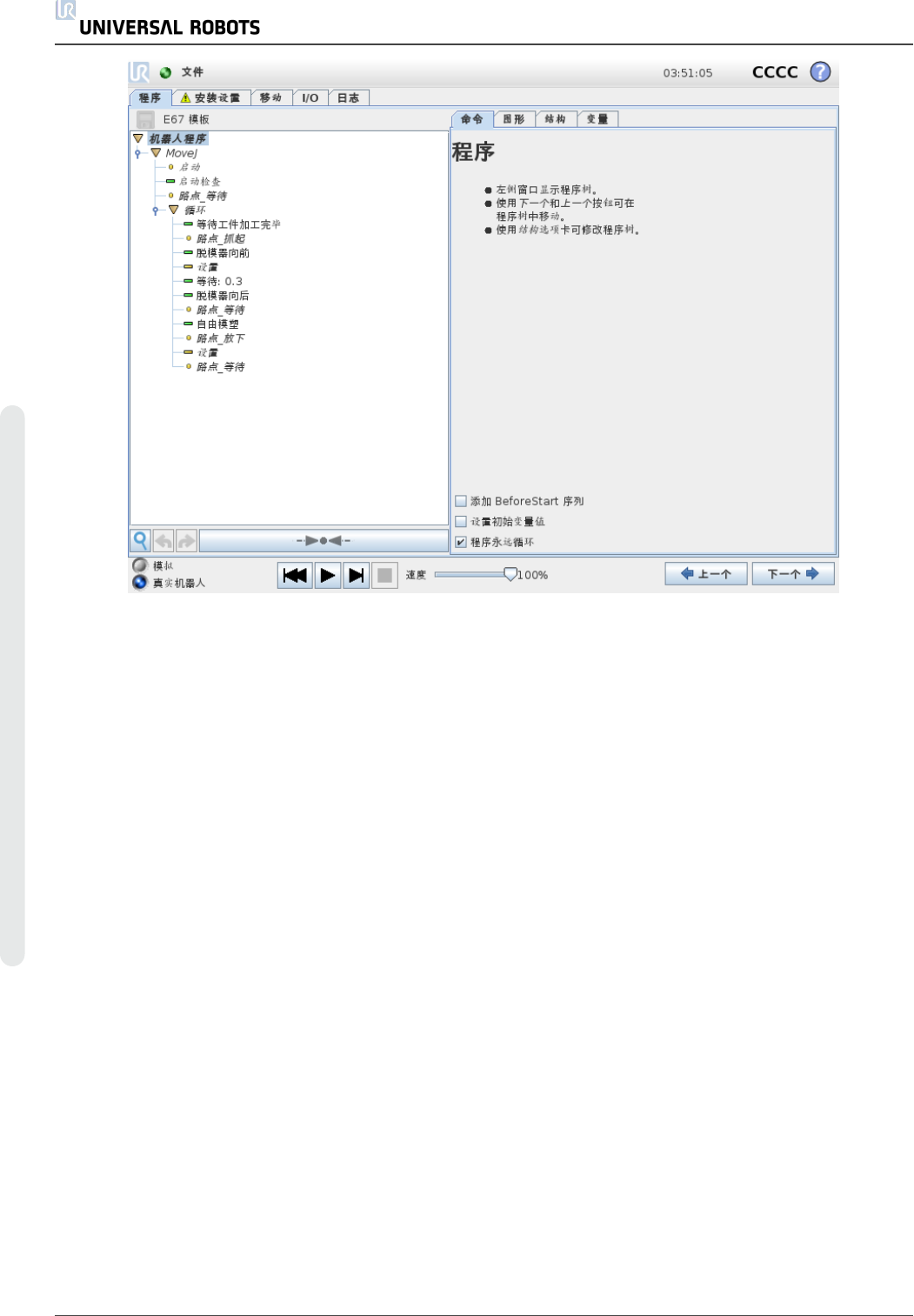
Euromap 67 程序模板已准备就绪,可以与 IMM 进行简单的交互。只要指定几个路点和一对 I/O
操作,机器人即可处理 IMM 塑模成型的工件。路点包括:
• WP_home_position:机器人执行操作程序时的起点位置。
• WP_wait_for_item:机器人等待 IMM 加工的物品就绪时所处的路点。
• WP_take_item:机器人从 IMM( 内部) 抓取物品时所处的路点。
• WP_drop_item:机器人放下从 IMM 抓取的物品时所处的路点。
两个
动作
节点用于控制工具,使工具能够从 IMM 抓取并握住物品,然后在移出 IMM 后松开并
放下物品。
如此,程序将循环执行这些步骤,不断从 IMM 搬运出刚刚塑模成型的工件。显然,应该对
循环
节点进行自定义,使机器人仅在 IMM 中有物品可取时才执行此循环。此外,应通过自定义
MoveJ
节点调整机器人移动速度,使其适应 IMM 的工作周期时间,如有必要,还应考虑物品的
易碎性。最后,每个 Euromap 67 结构均可根据具体的 IMM 程序进行自定义。
1.29.2. I/O 概览和故障诊断
有关 Euromap 67 I/O 的概览可在 I/O 选项卡中找到。
UR5 206 用 户 手 册
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
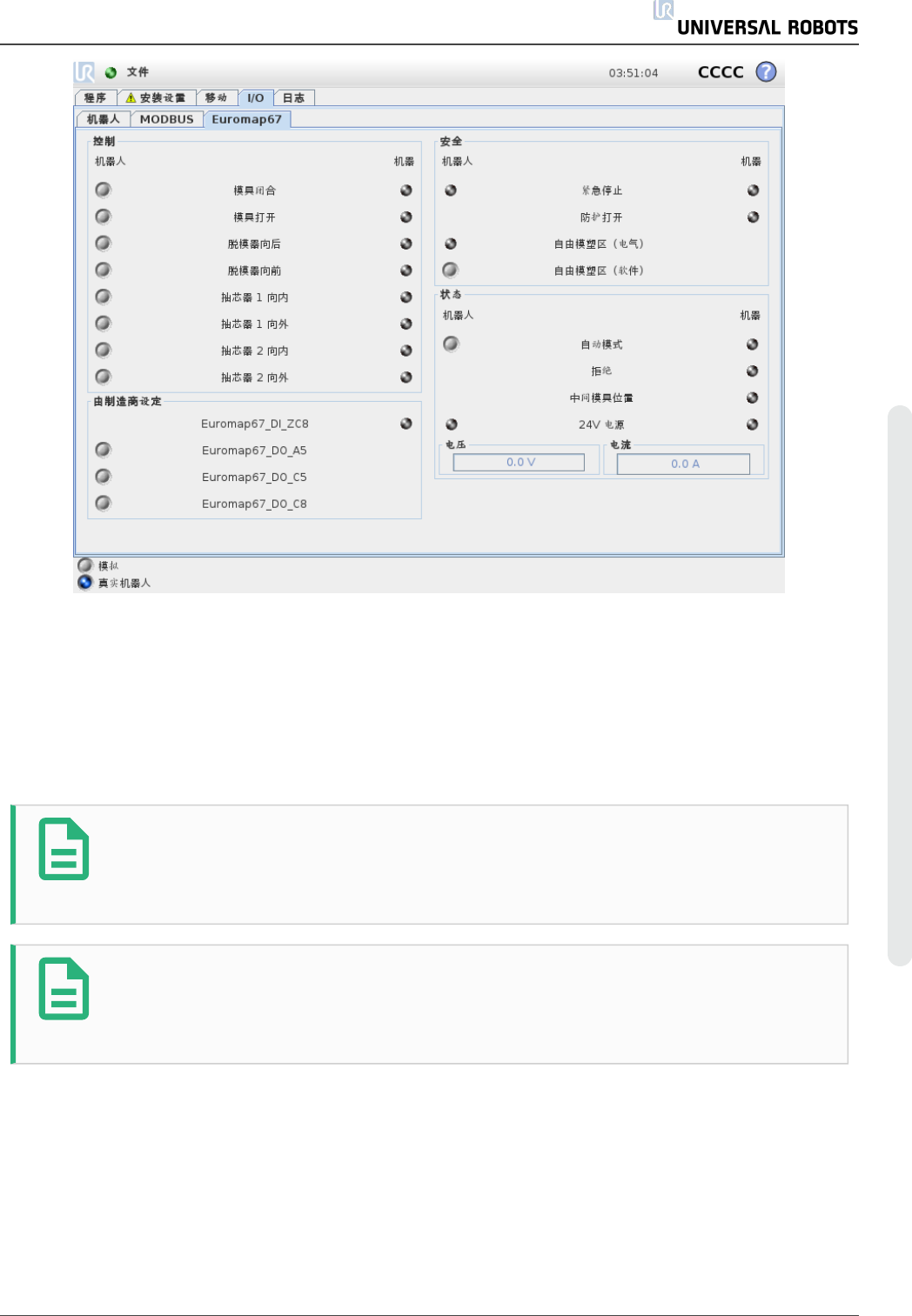
此屏幕中有四个框架,下面将逐一介绍。这四个框都包含
机器人
和
机器
这两列,分别显示用于
控制输出信号的按钮以及用于显示输入信号状态的指示器。
启动时,信号的( 一般) 状态均为低电平,但不包括
24V
信号和机器人输出
自动模式
,机器人自
动模式输出信号是低电平有效,因此默认设置为高电平。
如果某信号并不在程序结构中,但希望在机器人程序中使用该信号,则可以利用
动作
和
等待
等节点来实现。
提示
从机器人发往 IMM 的“自动模式”信号为低电平有效。该按钮反映的是实际电
平,因此该按钮未激活时,表示“自动模式”已激活。
提示
默认情况下,用于控制输出信号的按钮只能在机器人编程模式下使用。不过,
这可以根据需要在
安装设置
屏幕上的
I/O 设置
选项卡中进行设置。
控 制
此部分显示的是与控制机器人和 IMM 之间的交互相关的信号。这些信号都以适当可靠的方式
嵌入到程序结构中使用。
用 户 手 册 207 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。